") CANoe中的EtherCAT應(yīng)用
CANoe中的EtherCAT應(yīng)用

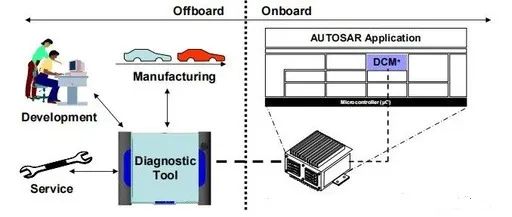
EtherCAT(Ethernet for Control Automation Technology)是一種基于以太網(wǎng)的現(xiàn)場總線技術(shù),主要用于需要高速、實(shí)時(shí)通信的工業(yè)自動(dòng)化領(lǐng)域,例如:機(jī)器人控制系統(tǒng)、數(shù)控機(jī)床、測(cè)試測(cè)量設(shè)備和汽車產(chǎn)線等。EtherCAT由Beckhoff Automation公司開發(fā)并成為IEC 61158標(biāo)準(zhǔn),目前由EtherCAT技術(shù)協(xié)會(huì)(ETG)推廣。ETG現(xiàn)在擁有數(shù)千家的公司成員,這些公司成員提供EtherCAT主節(jié)點(diǎn)實(shí)現(xiàn)、EtherCAT從節(jié)點(diǎn)以及開發(fā)工具。
EtherCAT具有傳輸速率高以及網(wǎng)絡(luò)拓?fù)湓O(shè)計(jì)靈活的特點(diǎn),并且具備極高的實(shí)時(shí)性,可實(shí)現(xiàn)主節(jié)點(diǎn)與從節(jié)點(diǎn)之間的精確同步。在汽車測(cè)試中,EtherCAT常被用于臺(tái)架控制、傳感器數(shù)據(jù)采集、電機(jī)控制以及IO組件控制等應(yīng)用。在使用CANoe進(jìn)行仿真測(cè)試時(shí),通過CANoe.For EtherCAT中的相關(guān)功能可以輕松地將第三方設(shè)備集成到測(cè)試系統(tǒng)中。
EtherCAT工作方式
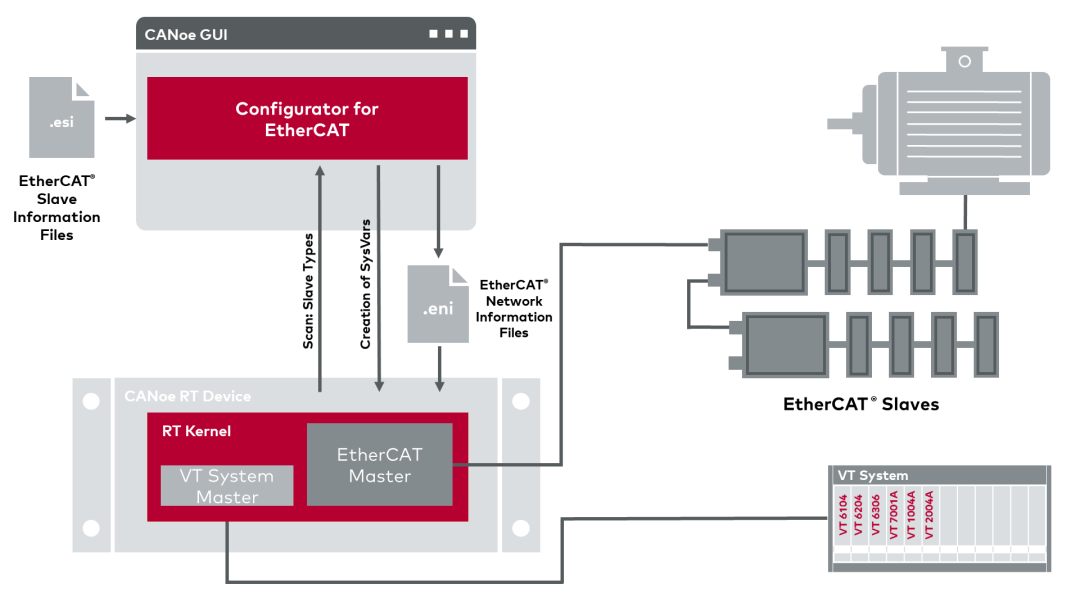
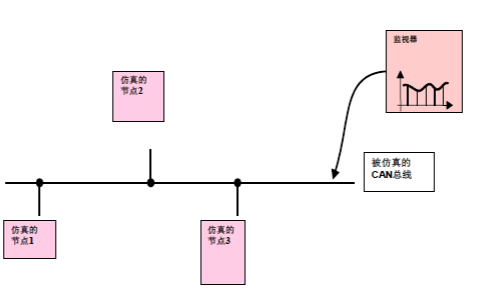
EtherCAT主節(jié)點(diǎn)發(fā)送一個(gè)幀信息,該信息會(huì)依次經(jīng)過每個(gè)從節(jié)點(diǎn)。信息經(jīng)過從節(jié)點(diǎn)時(shí),從節(jié)點(diǎn)無需將整包數(shù)據(jù)解碼,而是直接讀取相應(yīng)的編址數(shù)據(jù)提取與自己相關(guān)的信息,并在傳給下一個(gè)從節(jié)點(diǎn)時(shí)插入需要輸出的數(shù)據(jù)。整個(gè)過程僅會(huì)產(chǎn)生幾納秒的延遲。當(dāng)報(bào)文到達(dá)最后一個(gè)從節(jié)點(diǎn)檢測(cè)到開放端口時(shí),以全雙工方式返回主節(jié)點(diǎn)。
由于發(fā)送和接收的以太網(wǎng)幀中壓縮了大量的設(shè)備數(shù)據(jù),所以有效數(shù)據(jù)率可達(dá)90%以上。借助100 Mb/s TX的全雙工特性,EtherCAT的有效數(shù)據(jù)率甚至可以超過100 Mb/s。
EtherCAT主節(jié)點(diǎn)是單個(gè)網(wǎng)絡(luò)內(nèi)唯一允許主動(dòng)發(fā)送EtherCAT報(bào)文的節(jié)點(diǎn),其他所有從節(jié)點(diǎn)僅將報(bào)文向下游轉(zhuǎn)發(fā)。這種機(jī)制可以防止不可預(yù)測(cè)的延遲,確保系統(tǒng)的實(shí)時(shí)性。EtherCAT可以實(shí)現(xiàn)廣播、多播和點(diǎn)對(duì)點(diǎn)多種通訊方式。
EtherCAT主節(jié)點(diǎn)使用標(biāo)準(zhǔn)以太網(wǎng)介質(zhì)訪問控制器(MAC),無需額外的通信處理器。因此EtherCAT可以輕松部署在任何具有以太網(wǎng)端口的硬件平臺(tái)上。
CANoe中的EtherCAT應(yīng)用
CANoe.For EtherCAT支持仿真EtherCAT主節(jié)點(diǎn),以及將EtherCAT從節(jié)點(diǎn)集成到CANoe中。CANoe提供專門的EtherCAT配置頁面,在完成配置后會(huì)自動(dòng)生成對(duì)應(yīng)的系統(tǒng)變量,用戶通過讀寫這些系統(tǒng)變量就可以訪問從節(jié)點(diǎn)。CANoe的分析窗口、面板和測(cè)試腳本都可以用于EtherCAT的仿真、測(cè)試、記錄和分析。在運(yùn)行過程中,用戶可以通過EtherCAT診斷窗口直接訪問從節(jié)點(diǎn),便于在通信出現(xiàn)問題時(shí)進(jìn)行故障排查。
CANoe最多可以仿真兩個(gè)EtherCAT主節(jié)點(diǎn),從而在兩個(gè)獨(dú)立的EtherCAT網(wǎng)絡(luò)中控制從節(jié)點(diǎn)模塊。由于CANoe還支持多種其他總線通信,因此也可作為EtherCAT網(wǎng)關(guān)使用。目前CANoe無法直接仿真從節(jié)點(diǎn)并將其集成到其他EtherCAT網(wǎng)絡(luò)中。如果想實(shí)現(xiàn)CANoe與其他EtherCAT主節(jié)點(diǎn)進(jìn)行通信,需額外使用EtherCAT橋接終端設(shè)備(如Beckhoff EL6695),即可與外部主節(jié)點(diǎn)進(jìn)行雙向數(shù)據(jù)交換。
CANoe中的配置
使用EtherCAT功能首先需要安裝EtherCAT驅(qū)動(dòng)(驅(qū)動(dòng)在CANoe安裝目錄Installer Additional ComponentsEtherCATDriver下),目前僅支持特定的網(wǎng)絡(luò)適配器(可用的網(wǎng)絡(luò)適配器芯片參考鏈接CANoe.For EtherCAT)。然后將EtherCAT從節(jié)點(diǎn)通過網(wǎng)線連接到該網(wǎng)絡(luò)適配器。
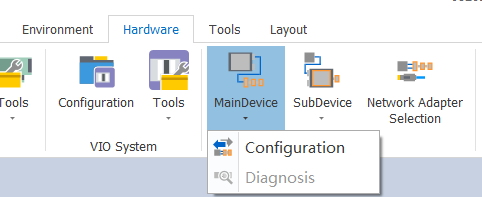
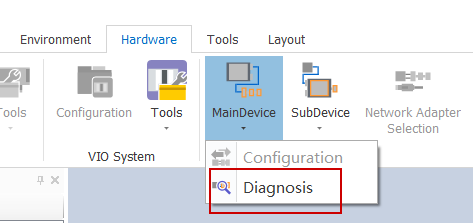
在Hardware->For EtherCAT->MainDevice菜單打開“Configurator for EtherCAT”:
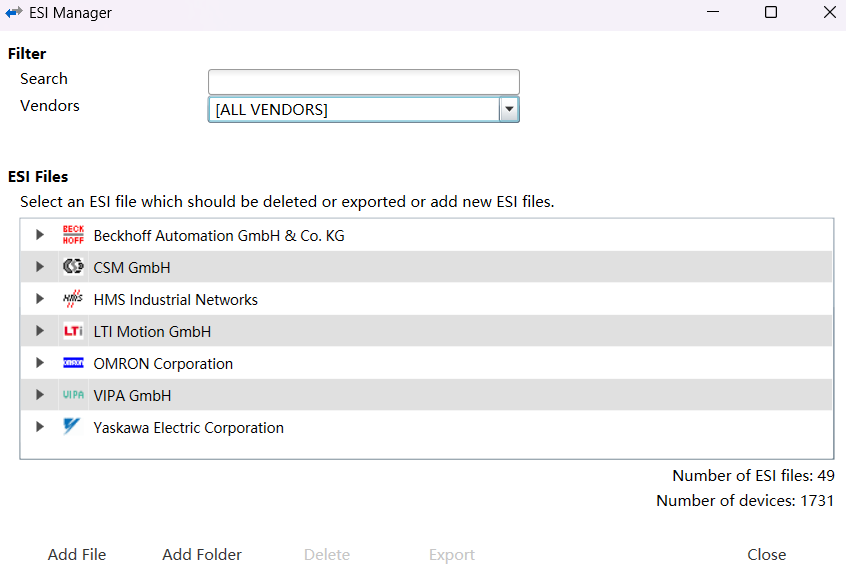
在配置工具中打開File->ESI Manager,并添加ESI/ENI文件(如果ESI Files列表中已經(jīng)包含要使用的EtherCAT從節(jié)點(diǎn)的配置信息,則無需添加)。該文件包含EtherCAT從節(jié)點(diǎn)的初始化和配置信息,是CANoe與EtherCAT從節(jié)點(diǎn)通信的必要文件,通常由設(shè)備生產(chǎn)廠商提供。
掃描連接的從節(jié)點(diǎn),如果通信正常則會(huì)自動(dòng)生成從節(jié)點(diǎn)列表。
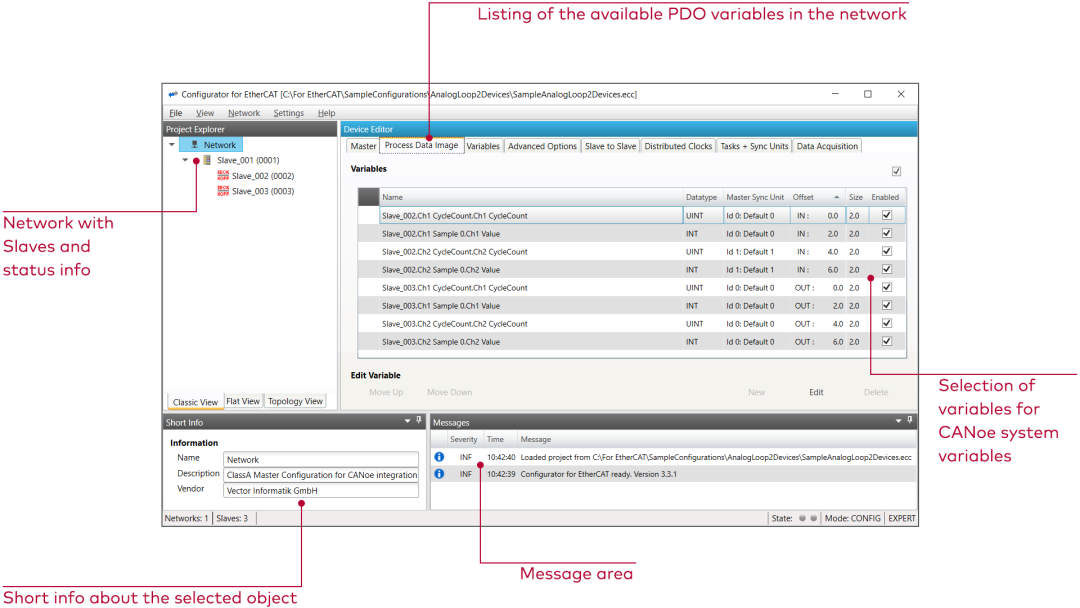
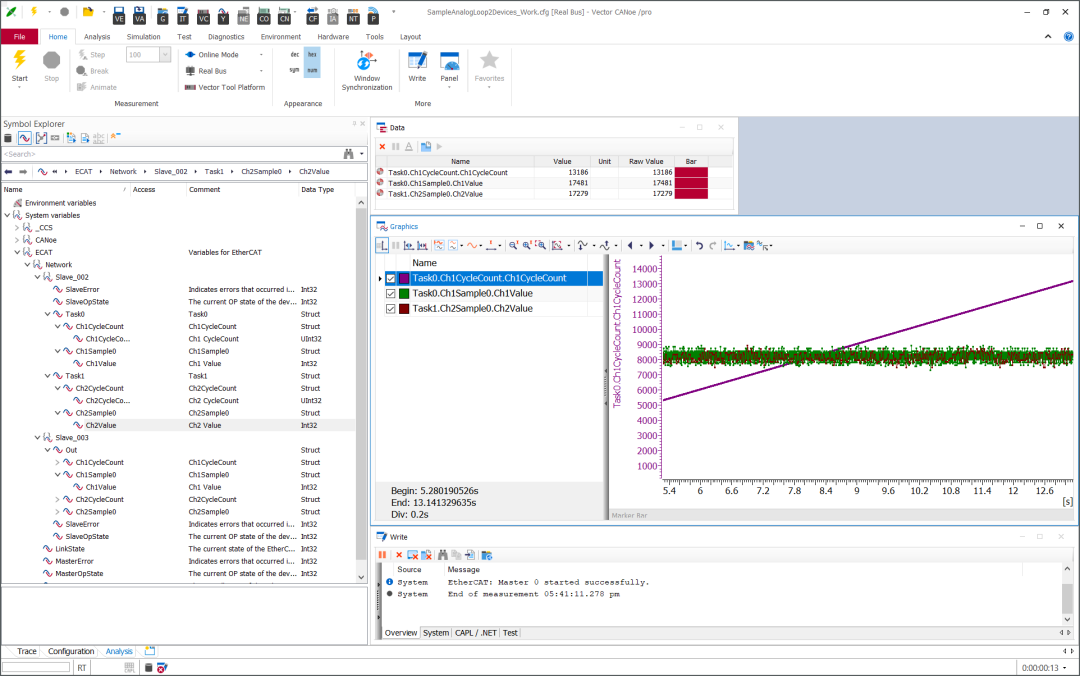
配置完成后,CANoe會(huì)自動(dòng)生成相關(guān)系統(tǒng)變量。在從節(jié)點(diǎn)下的系統(tǒng)變量中,命名空間Out對(duì)應(yīng)CANoe可以給從節(jié)點(diǎn)發(fā)送的信號(hào),可以修改其數(shù)值;命名空間Task對(duì)應(yīng)從節(jié)點(diǎn)發(fā)送給CANoe的信號(hào),可以在Trace、Graphic等窗口觀測(cè)。
EtherCAT故障診斷
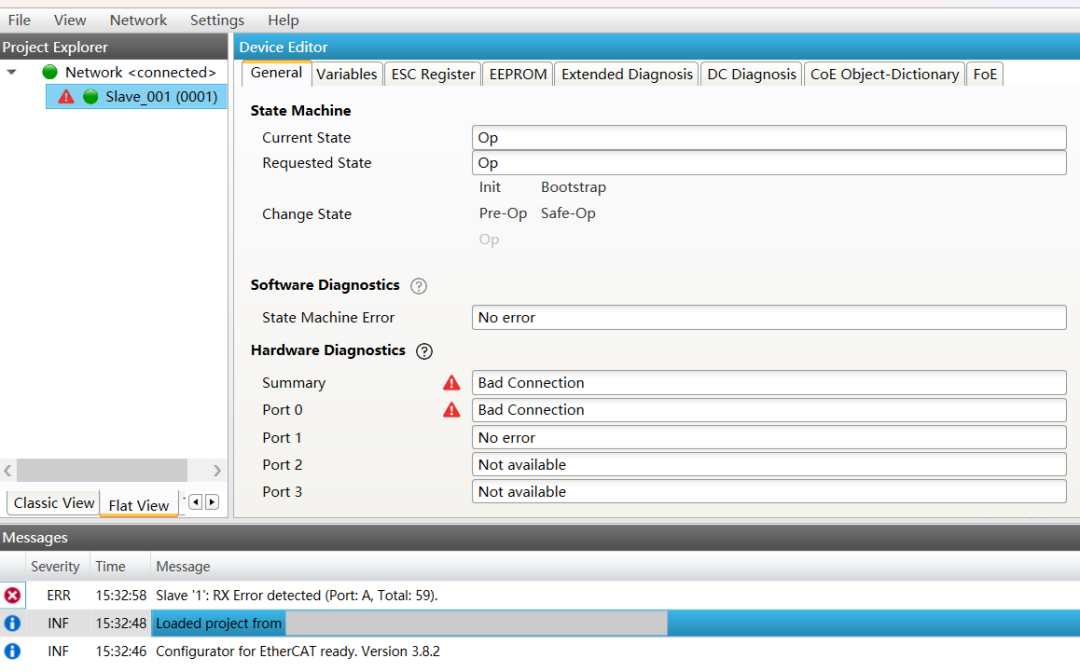
CANoe提供EtherCAT診斷窗口,通過該窗口可以實(shí)現(xiàn)故障排查、參數(shù)修改、文件傳輸?shù)榷喾N功能。
在該窗口中可以查看與從節(jié)點(diǎn)的連接狀態(tài),切換從節(jié)點(diǎn)的狀態(tài)機(jī)以及檢查軟硬件的故障狀態(tài)。在診斷對(duì)話框中會(huì)顯示運(yùn)行信息。當(dāng)單個(gè)從節(jié)點(diǎn)失效或電纜連接有缺陷等導(dǎo)致EtherCAT通信出現(xiàn)問題時(shí),可以快速定位和排除快速故障。
總結(jié)
以上是CANoe對(duì)EtherCAT的支持,可以方便地將EtherCAT設(shè)備集成到CANoe測(cè)試平臺(tái)中,不僅拓展了CANoe自動(dòng)控制第三方設(shè)備的能力,在測(cè)試過程中還可以確保通信總線、VT System與EtherCAT設(shè)備具有統(tǒng)一的時(shí)間戳,提高了測(cè)試系統(tǒng)的集成度以及控制的便捷性
-
控制器
+關(guān)注
關(guān)注
114文章
17791瀏覽量
193228 -
以太網(wǎng)
+關(guān)注
關(guān)注
41文章
5998瀏覽量
180866 -
ethercat
+關(guān)注
關(guān)注
19文章
1511瀏覽量
45221 -
CANoe
+關(guān)注
關(guān)注
4文章
85瀏覽量
9770
原文標(biāo)題:CANoe對(duì)EtherCAT的支持
文章出處:【微信號(hào):VectorChina,微信公眾號(hào):Vector維克多】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
CANoe中Logging模塊使用方法及妙招

診斷中常用的服務(wù)及在CANoe中的應(yīng)用#診斷自動(dòng)化測(cè)試 #CANoe
CANoe:網(wǎng)絡(luò)和ECU開發(fā)、測(cè)試和分析的專業(yè)工具
CANOE教程之CANOE的使用手冊(cè)免費(fèi)下載
CANoe軟件的介紹
淺談CANoe實(shí)現(xiàn)SOA仿真測(cè)試
期待已久的ADAS終于能在CANoe15.0中實(shí)現(xiàn)了,看看15.0還有哪些新變化
CANoe進(jìn)階功能:Multi CANoe
CANoe集成解決方案
CANOE工具使用教程
Python與CANoe/CANoe4SW

CANoe對(duì)EtherCAT的支持
CANoe中ADAS功能集介紹
CANoe.Diva典型使用問題五則




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論