 多臺倉儲AGV協作全局路徑規劃算法的研究
多臺倉儲AGV協作全局路徑規劃算法的研究

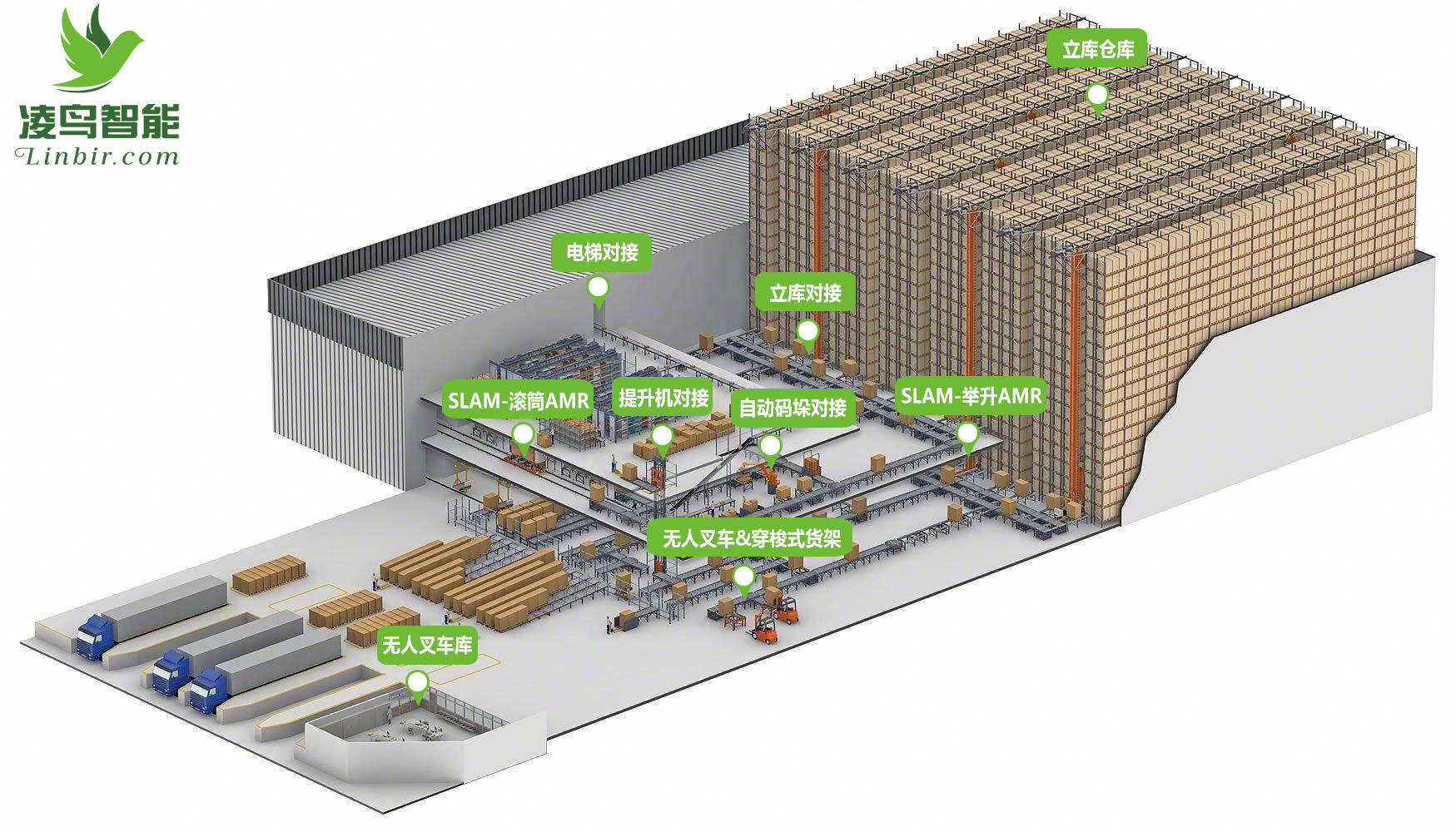
對于自動導引車(Automated Guided Vehicle,AGV)的單機路徑規劃問題,已存在很多靜態算法可以有效求解。但由于 AGV間搶占系統資源的相互影響和制約,多臺AGV的協同作業會出現死鎖、碰撞沖突等問題,靜態路徑規劃算法無法滿足實時動態作業的系統需求。智能倉儲系統中,多AGV動態路徑規劃的核心問題不再僅是單AGV快速求解最優路徑,而在于多臺AGV的沖突避免或解決,達到整體協調最優。
倉儲AGV
要使得多個機器人在道路規劃上最優,無非是在單個小車規劃路徑時考慮其他小車的行駛路線,進而選取最優的一個行駛方案。另外,不同于室外場景,我們在倉庫中規劃小車路徑,整個道路都是可以設計的,所以我們的問題可拆解為:
(1) 倉庫中道路的設計;
(2) 獲取到其他小車的路徑行駛狀態;
(3) 定義可能的道路擁堵;
(4)規劃最短路徑;
(5) 交通管制。
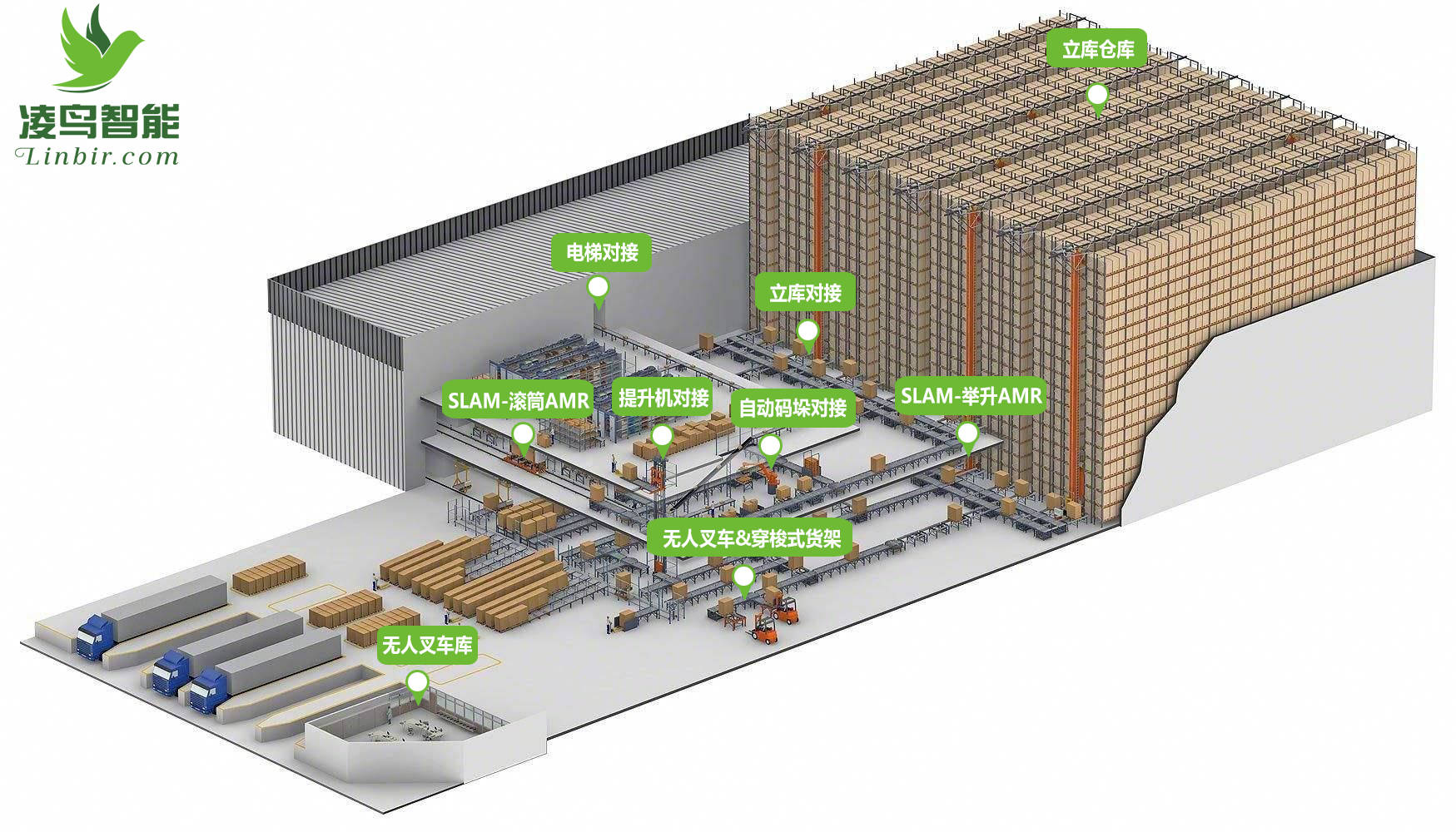
 多AGV
多AGV
在規劃AGV小車路徑時,要在考慮到道路擁堵的情況下去規劃最短路徑,以滿足整體規劃結果最優,使用A*算法,用G值為參考檢查新的路徑是否更好, 將地圖中其他小車規劃的路徑的點的G值增加,即可盡量避免搜索到相同的路徑,同樣的道理,在車輛需要轉彎的時候,也同樣增加轉彎下一點的G值,從而規劃路徑盡量避免轉彎的情況出現,來達到整體效率最高,全局路徑最優。
此外,由于路徑規劃都是靜態規劃的路徑,車輛在行走過程中同時需要對每輛小車進行鎖格的交通管制,來保證車輛不會相撞。
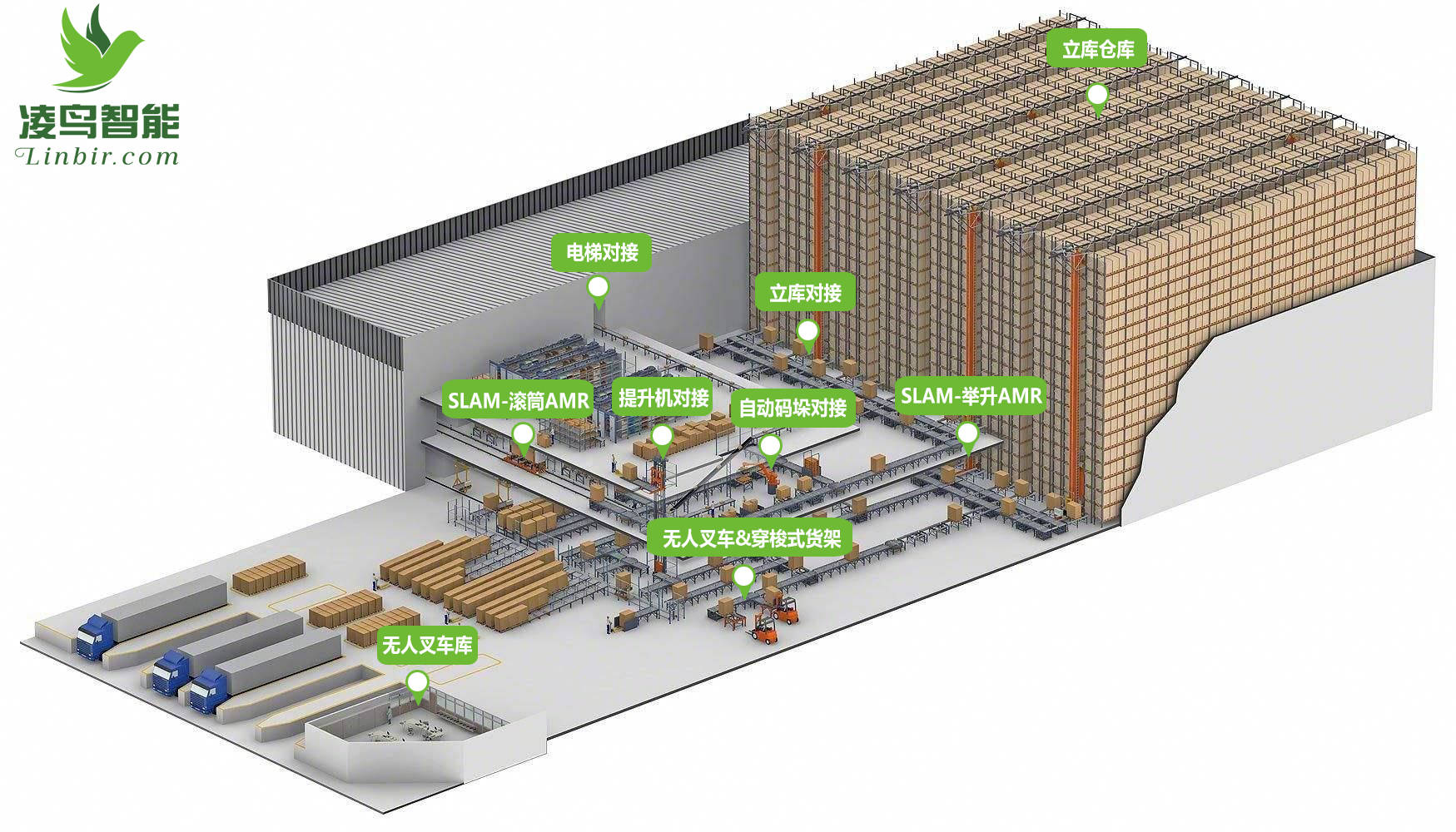
 AGV小車
AGV小車
企業必須認識到,過去靠勞動密集型低端產業獲得原始積累的老路子已經走到頭了,依靠各種創新,才是制造業的唯一出路。但是抱著“別人有我也有”的思路去上馬AGV物流項目,失敗是必然的,“有”和“有用”有著天壤之別,一定要在創新的基礎上,響應用戶自身的需求。如用途、場地、成本、產品檔次等情況。
合理規劃AGV小車路徑,減少交通堵塞問題,一個良好的路徑規劃,不但可以使多臺AGV小車降低道路堵塞的風險,還可以讓物流系統更加順暢,搬運效率更高。
審核編輯 黃宇
-
AGV
+關注
關注
28文章
1554瀏覽量
43664 -
AGV小車
+關注
關注
4文章
195瀏覽量
12140
發布評論請先 登錄
Profibus DP?轉 RS232:物流倉儲立體庫 / AGV?位置檢測協議轉換網關解決方案

EtherCAT?轉 Modbus RTU:智能倉儲 AGV?與輸送線通信互聯改造打通匯川控制器與傳感器數據鏈路

無線打通工業鏈路:Profibus DP 轉無線模塊賦能 S7-300PLC 與 AGV 小車通信
AGV工作節拍計算
AGV視覺導航:智能物流的“智慧之眼”
大型電商倉儲物流中心AGV小車通過Modbus RTU轉Profinet模塊與西門子PLC進行數據互傳解決案例

Modbus RTU轉Profinet:AGV小車與西門子1500PLC數據互通的大型電商倉儲物流案例

杰和科技算力主板助力智能倉儲打造無人化倉儲搬運

三坐標測量機路徑規劃與補償技術:核心算法解析
AGV小車中的動態路徑規劃算法揭秘

AGV通信第2期 AGV集群智能路徑規劃解決方案

AGV通信第1期 KAXA無線通信技術賦能AGV智慧物流系統升級

KAXA凱莎科技AGV通信方案如何賦能智能倉儲高效運作?
具身智能工業機器人路徑規劃算法成為破局關鍵
AGV小車廠房限速多少?



 工商網監
工商網監
評論