 康謀技術 | 自動駕駛:揭秘高精度時間同步技術(二)
康謀技術 | 自動駕駛:揭秘高精度時間同步技術(二)

在自動駕駛中,對車輛外界環境進行感知需要用到很多傳感器的數據(Lidar,Camera,GPS/IMU),如果計算中心接收到的各傳感器消息時間不統一,則會造成例如障礙物識別不準等問題。
為了對各類傳感器進行高精度的時間同步,可以分為幾部分內容:統一時鐘源,硬件同步,軟件同步。
一、統一時鐘源
在構建自動駕駛的時間同步架構時,我們面臨著一個核心問題:如何確保系統中各個傳感器的時間基準一致?由于每個傳感器可能擁有自己的內部時鐘,而這些時鐘之間可能存在微小的頻率差異,即所謂的“鐘漂”。這些差異隨時間累積,會導致各傳感器時間基準的不一致。
為了解決這一問題,引入了統一時鐘源的概念。統一時鐘源的作用是提供一個所有傳感器都遵循的共同時間參考,如圖1所示。
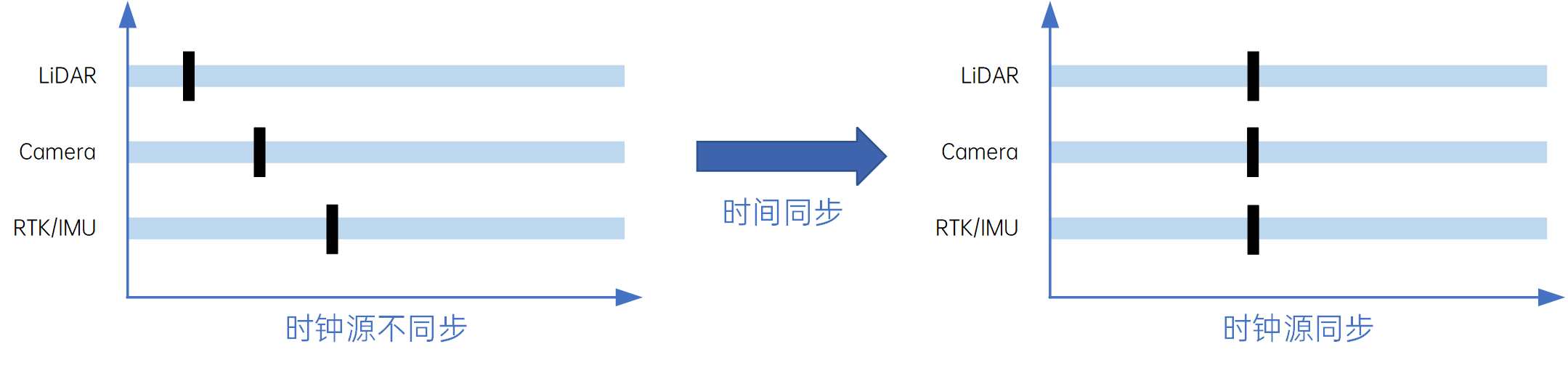 圖1:統一時鐘源
圖1:統一時鐘源統一時鐘源有兩種常見方式:一種是基于GPS的“PPS+NMEA”,另一種是基于以太網的IEEE 1588/802.1AS(PTP/gPTP)時鐘同步協議。關于兩種時鐘源同步方式可查看上篇文章:自動駕駛:揭秘高精度時間同步技術(一)。
二、時間戳誤差
當傳感器數據被標記上從GPS接受到的全局時間戳,時間戳通常來源于精確的時間同步協議(如UTC time·),這樣以GPS為基準的時間戳,簡化了同步過程,非常方便。每個傳感器數據都有了全局一致的時間參考。
但同樣也會面臨一個問題,不同的傳感器采樣頻率不一樣,比如激光雷達(通常為10Hz)和相機(通常為25/30Hz)。導致在特定時間獲取同步數據可能會有延遲,在動態環境中可能造成較大的誤差。
比如圖2中,三個傳感器具有不同的采樣頻率,在T1時刻,傳感器2有一個數據,此時,我們需要對應傳感器1和3的數據是多少,就會進行查找。查找的方式就是找對應的傳感器數據和傳感器2時間差最近的數據包。如果查找的數據包時間和T1時刻傳感器2數據包的差距較大,在加上車身和障礙物都在移動,這樣誤差會比較大。
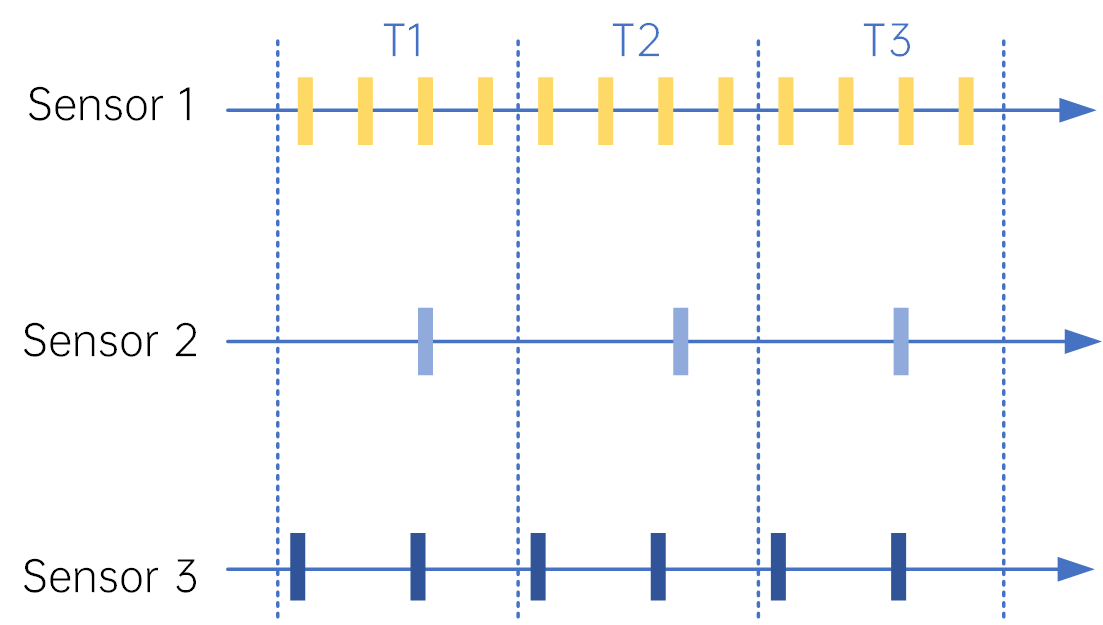 圖2:傳感器時間戳
圖2:傳感器時間戳為了緩解查找時間戳造成的誤差現象,主要采用的方式有硬件同步和軟件同步。
三、硬件同步
硬件同步是一種通過物理信號來確保不同傳感器數據采集時間一致性的方法。自動駕駛上使用的相機(Rolling Shutter)一般是支持外部觸發曝光的。激光雷達通常支持兩種時間同步接口,基于PTP時間同步和PPS+NMEA協議。因此,一種常見的硬件同步方法是使用PPS信號作為觸發器。PPS信號是一個精確的時鐘信號,可以觸發傳感器在特定的時間點采集數據。
例如,激光雷達和相機可以配置為在PPS信號的上升沿采集數據,從而確保兩者的數據采集是同步的。具體來說,激光雷達可以利用其相位鎖定功能來實現與PPS信號的同步,如圖3所示。通過設置激光雷達的相位鎖定角度與相機視野的中心對齊,可以在激光雷達的激光束旋轉到特定角度時觸發相機,實現兩者的同步采集。
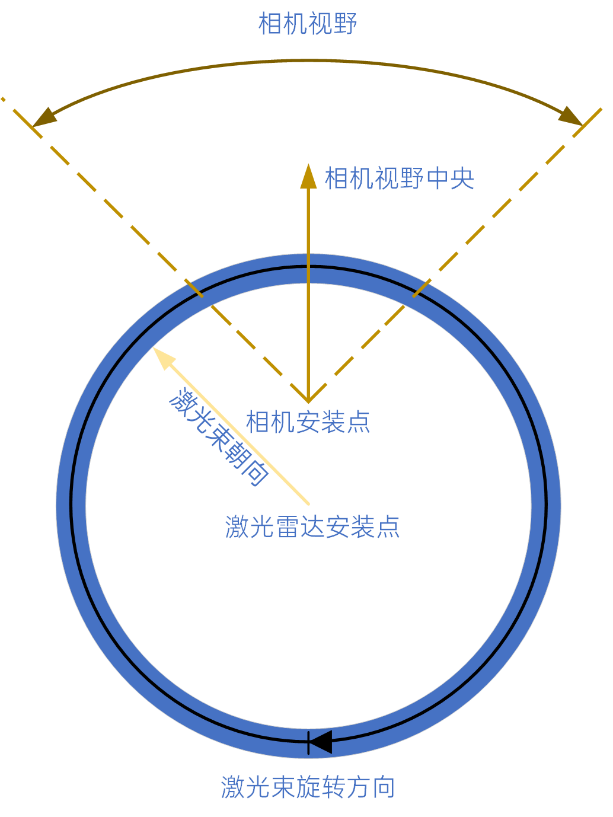 圖3:激光雷達與相機時間同步觸發
圖3:激光雷達與相機時間同步觸發當然,由于激光雷達是連續旋轉采集數據,而相機則是瞬間曝光,所以硬件同步只能近似實現。例如,激光雷達的幀率若是10Hz,那么一幀點云中最早和最晚采集的點之間的時間差可能達到100ms。相機由于曝光是瞬時的,其所有像素點的采集時刻是一致的。因此,對于相機視野中心的點云,采集時間與圖像采集時間一致,但對于視野邊緣的點云,存在一定的時間偏差,這個偏差可能在5ms到20ms之間。
四、軟件同步
軟件同步是一種在數據處理階段對傳感器數據進行時間校正的方法。當硬件同步無法實現或不足以滿足系統要求時,軟件同步提供了一種解決方案,利用已知的時間標簽和傳感器的運動信息來推算傳感器數據的準確時間點。
內插外推法是軟件同步中常用的一種算法。通過以下步驟實現同步:
時間差計算:首先,計算兩個傳感器數據幀之間的時間差。例如,如果有一個激光雷達(Lidar)數據幀和一個相機數據幀,它們的時間標簽可能不同,我們需要找出這兩個時間標簽之間的差異;
- 運動信息獲取:收集傳感器在兩個時間標簽期間的運動信息,這通常包括速度、加速度和旋轉等;
- 位置推算:利用傳感器的運動信息和時間差,通過物理模型或機器學習模型推算目標在兩個時間點之間的位置變化;
- 建立新幀:根據推算出的目標位置,創建一個新的數據幀,這個新幀代表了兩個原始數據幀之間的某個時間點的狀態。
軟件同步通過智能的數據處理技術彌補了硬件同步的不足,提高了傳感器數據的同步精度,當然,它也需要額外的計算和實時性要求,需要精心設計和優化算法來實現高效準確的同步。
作者介紹
鄭工
康謀科技自動駕駛技術研發工程師 具備超過五年的汽車電子和自動駕駛數據分析經驗。在高精度傳感器數據采集、整合與優化方面具有深厚的專業知識,尤其在車載網絡和實時數據采集系統設計方面有著豐富的實踐經驗。 曾多次代表公司參加國內外技術研討會和培訓項目,深入了解國際自動駕駛行業的最新動態和技術趨勢,積累了豐富的國際視野。 具備跨學科技術整合能力,擅長傳感器數據實時處理、可視化和算法開發與集成,能夠高效優化系統性能,增強自動駕駛車輛的環境感知能力。
-
時間同步
+關注
關注
1文章
226瀏覽量
10631 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179782
發布評論請先 登錄
康謀新聞 | 康謀與Coppelia Robotics正式建立合作伙伴關系!

自動駕駛場景生成方法及優選方案:康謀aiSim 3DGS方案重塑行業標準
自動駕駛仿真軟件推薦:康謀aiSim——ISO 26262 ASIL-D 認證的高保真選擇
自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

自動駕駛BEV Camera數據采集:時間同步技術解析與康謀解決方案

自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
康謀新聞 | 實力認證!康謀aiSim榮獲ASAM“自動駕駛仿真技術獎”
麥斯塔MST8011AI-21系列晶振:自動駕駛的高精度“節拍器”
康謀新聞 | 康謀加入ASAM組織,全球首個ASIL-D認證自動駕駛仿真平臺aiSim引領安全新標桿

如何制作一張自動駕駛高精度地圖?

時統設備高精度時間同步解決方案:為數字化時代注入精準時間基因
方案分享 | 高精度時間同步技術的實現與應用
康謀分享 | 自動駕駛仿真進入“標準時代”:aiSim全面對接ASAM OpenX

愛普生高精度車規晶振助力激光雷達自動駕駛

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關鍵技術




 工商網監
工商網監
評論