 高通自動駕駛靠軟件開發革新力壓英偉達自動駕駛芯片
高通自動駕駛靠軟件開發革新力壓英偉達自動駕駛芯片

拋開價格不談,英偉達自動駕駛芯片毫無疑問是最強的,設計范圍在2019年底確定的Orin至今仍是量產最強的自動駕駛芯片,但除了奔馳外的歐美大廠更傾向于選擇高通平臺,這是因為高通的新軟件開發體系更符合歐美大廠的需求,直白講就是軟件研發成本更低,周期更短,從以前的數年變為數周乃至數天。這就是高通和亞馬遜AWS聯合的CI/CD軟件開發體系。軟件越復雜,這種開發體系效率提升越明顯。
傳統汽車軟件開發的V模式
圖片來源:KPIT
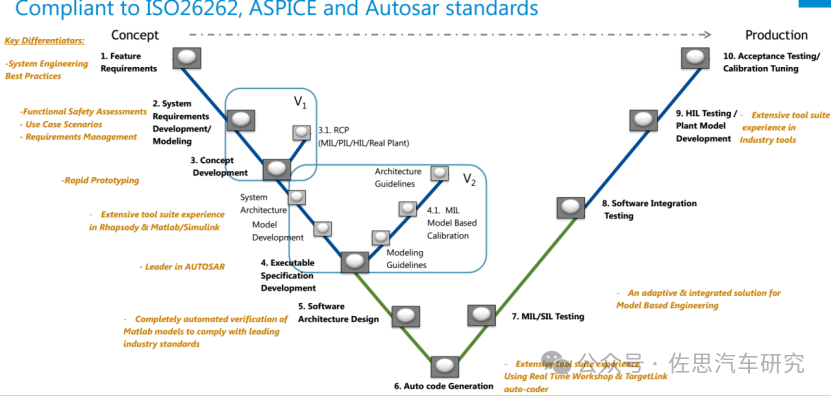
傳統汽車軟件開發的V模式,軟件開發遵循僵化、遲鈍的瀑布法,并使用高度離散的工具鏈。開發過程被分割為不同的階段,只有前一個階段結束,后一個階段才會開始。許多開發過程都需要手動完成。從工具鏈的一個部分切換到下一個部分也是如此。采用這種方法,即使很微小的軟件版本升級都需要耗時六到八個月。每換一個車型或一個SoC芯片,所有的工作都需要重復一遍,且軟件上車后,基本就算完成了軟件開發工作。
傳統的瀑布式,分離軟件開發體系
圖片來源:EY
軟件定義汽車如果采用這種傳統方法,會帶來天價開發費用和超過數年的開發周期,因此汽車行業借鑒IT行業的經驗,導入了CI/CD,CI即Continuous Integration,CD即Continuous Deployment或Continuous Delivery,持續集成/持續部署(交付),高通和AWS合作最早將CI/CD代入汽車工業,應用得最為熟練。智能駕駛領域,軟件異常復雜,需要大量的仿真測試,又牽涉到持續更新,還是數據驅動型,是CI/CD的最佳應用領域,反過來,智能駕駛領域必須用CI/CD,否則開發周期和成本都會很高。
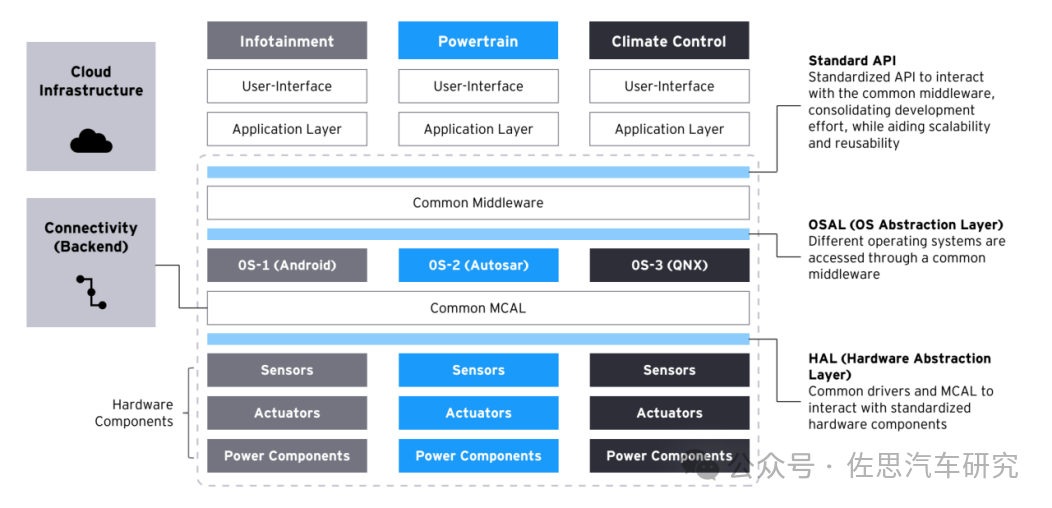
軟件定義汽車的標準化軟件開發平臺,即軟件工廠架構
圖片來源:EY
當然不僅是智能駕駛領域,整個汽車軟件領域都能推廣CI/CD。
圖片來源:CY
持續集成(CI)是指頻繁地(每天至少一次)將代碼集成到主干,其好處主要有:快速發現錯誤;每完成一點更新就集成到主干,可以快速發現、定位錯誤;防止分支大幅偏離主干。如果不是經常集成,主干又在不斷更新,會導致以后集成的難度變大,甚至難以集成。
軟件開發教父Martin Fowler說過:“持續集成并不能消除Bug,而是讓它們非常容易被發現和改正。”持續集成(CI)開發人員將會頻繁地向主干提交代碼,這些新提交的代碼在最終合并到主干前,需要經過自動化集成、靜態代碼解析和自動化測試流進行驗證,目標是快速確認開發人員新提交的變更是正確且適合在代碼庫中進一步使用的,有助于降低總體構建成本,并在開發周期的早期發現缺陷。
CI持續集成架構
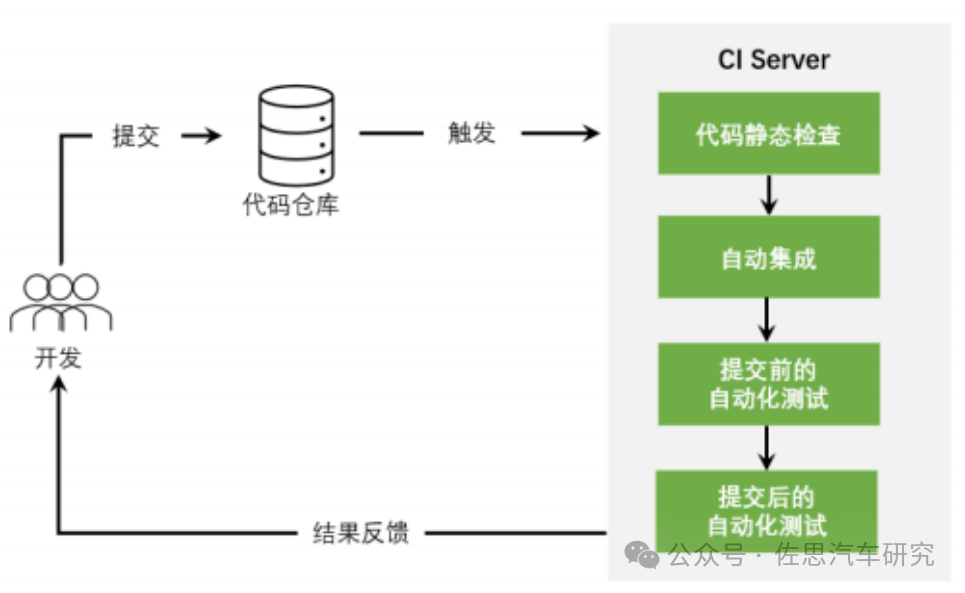
圖片來源:網絡
在持續集成(CI)方法中,軟件將實現自動化編譯,軟件開發的各個步驟都將包含在 “CI鏈” 中,因為一個環節的輸出將成為下一個環節的輸入。持續部署(CD)是指在車輛上市后自動部署新的軟件版本。CI/CD以及持續測試(CT),現在都可以在汽車上實現,但在汽車行業,測試新的高級應用程序會造成獨特的難題,原因是測試需要在實體車輛上或者在測試臺上的復雜模擬環境中進行。例如,想象一下對特定軟件進行測試有多復雜,該軟件需要分析來自多個雷達和攝像頭的輸入信息,以便自主執行操控,如超過公路上慢速行駛的汽車,或者在車輛、行人及其它障礙物遍布的復雜城市環境中進行導航。
持續測試
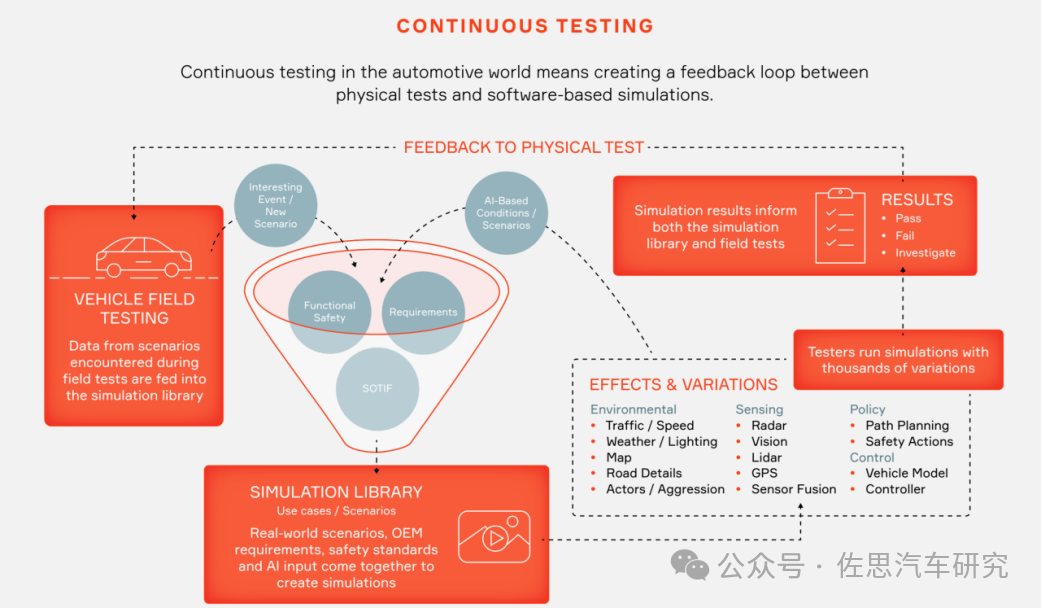
圖片來源:Aptiv
理想的方法是通過基于云的集中化平臺,使開發人員能夠在位于世界任何測試中心的相關測試臺上執行任何測試,從而消除開發和測試過程中的瓶頸。這些測試可以安排軟件在環(SIL)、硬件在環(HIL)甚至車輛在環(VIL),以便進行更真實的測試。此方法可以利用全球資源,達到處理當今艱巨挑戰所需的規模。
CI/CD的無窮循環
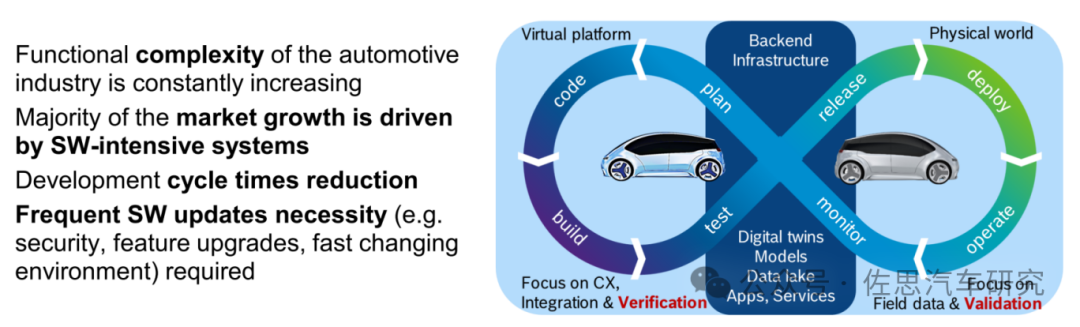
圖片來源:MathWorks
CI/CD的具體執行就是DevOps
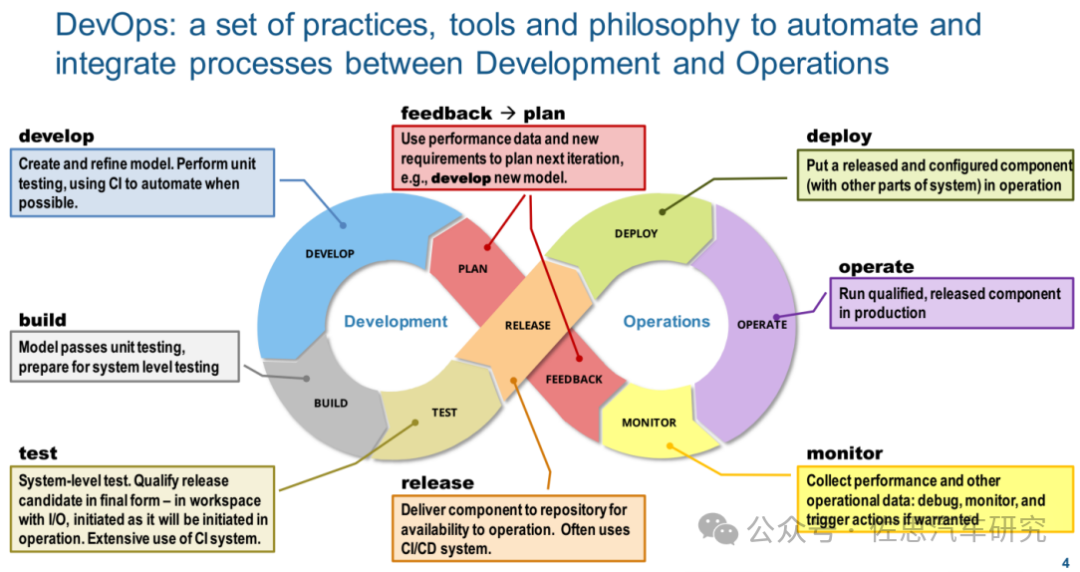
圖片來源:AWS
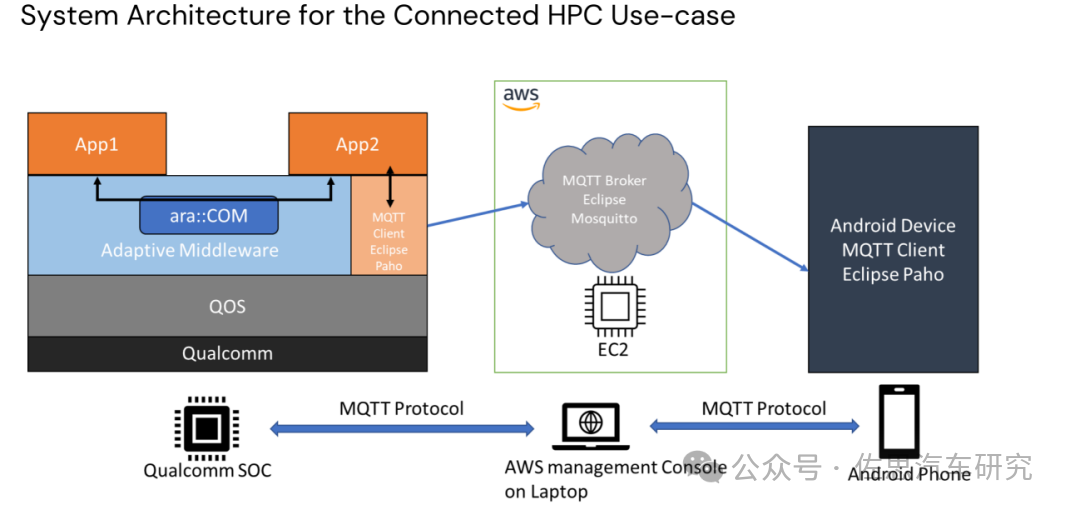
高通與AWS聯合的云開發平臺正是基于CI/CD的理念
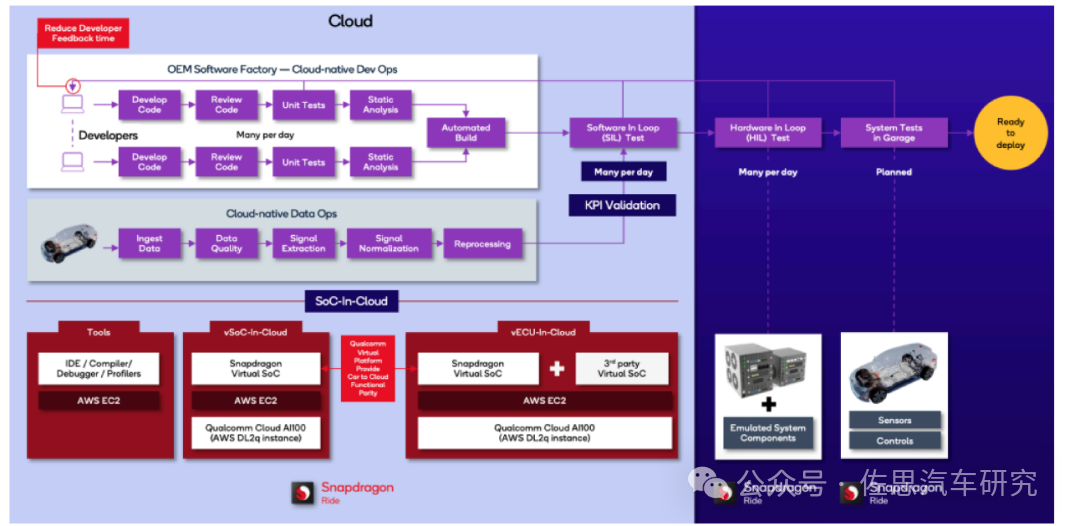
圖片來源:AWS
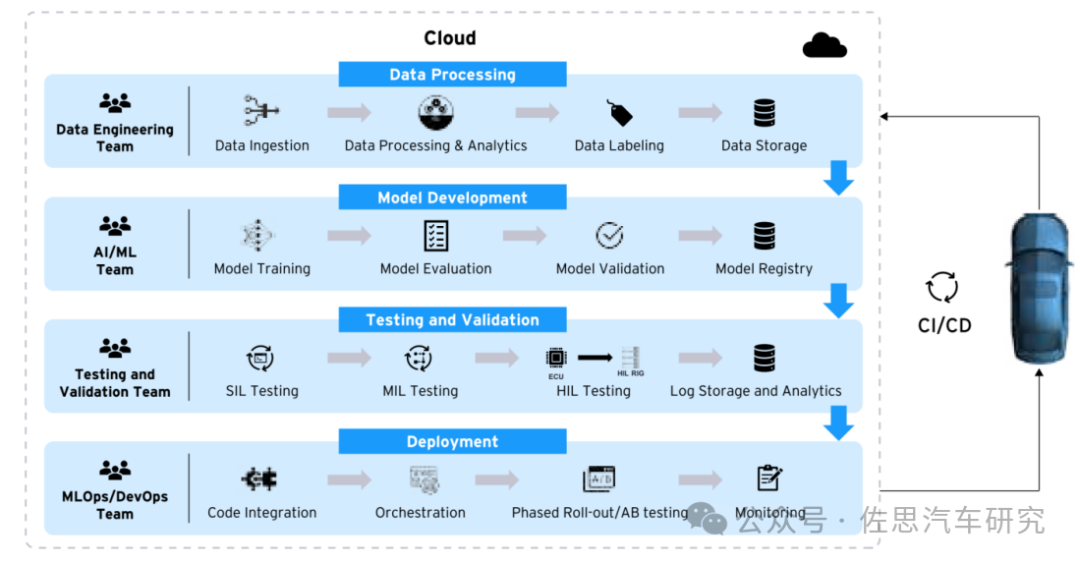
AWS基于云的自動駕駛數據驅動開發流程
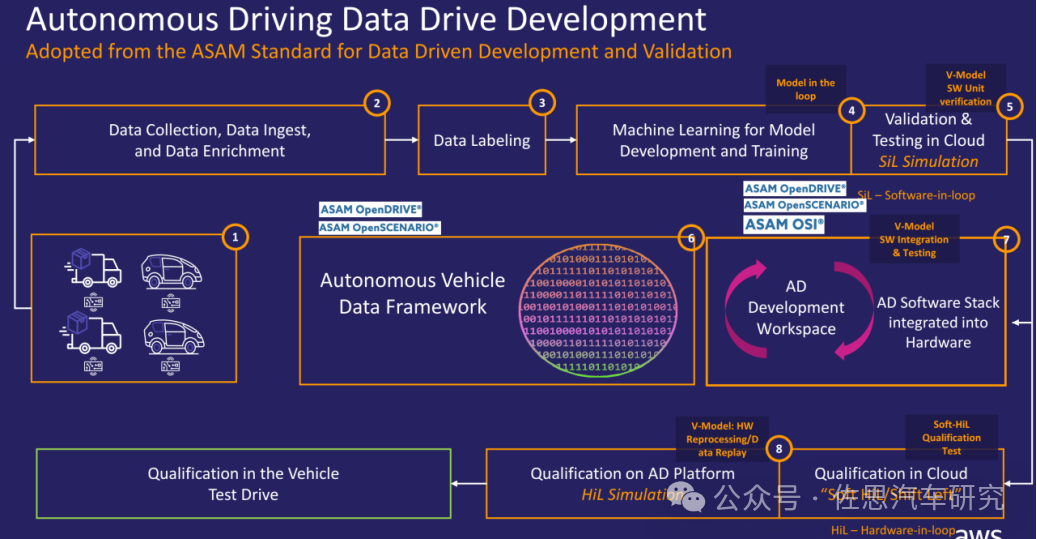
圖片來源:AWS
AWS原生云汽車軟件開發
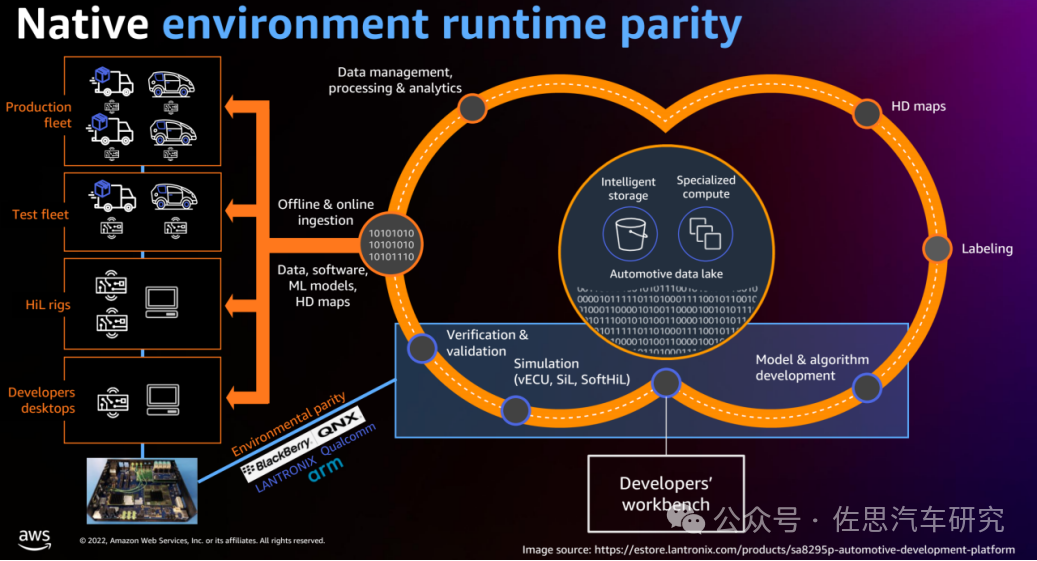
圖片來源:AWS
CI/CD環,省略很多目標搭建和基礎測試
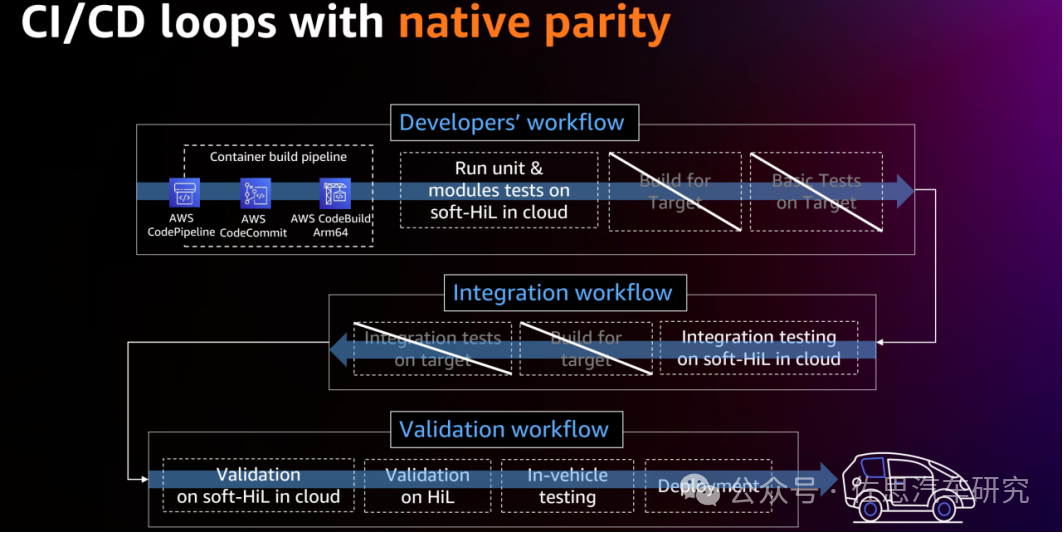
圖片來源:AWS
高通數字底盤與軟件定義汽車架構
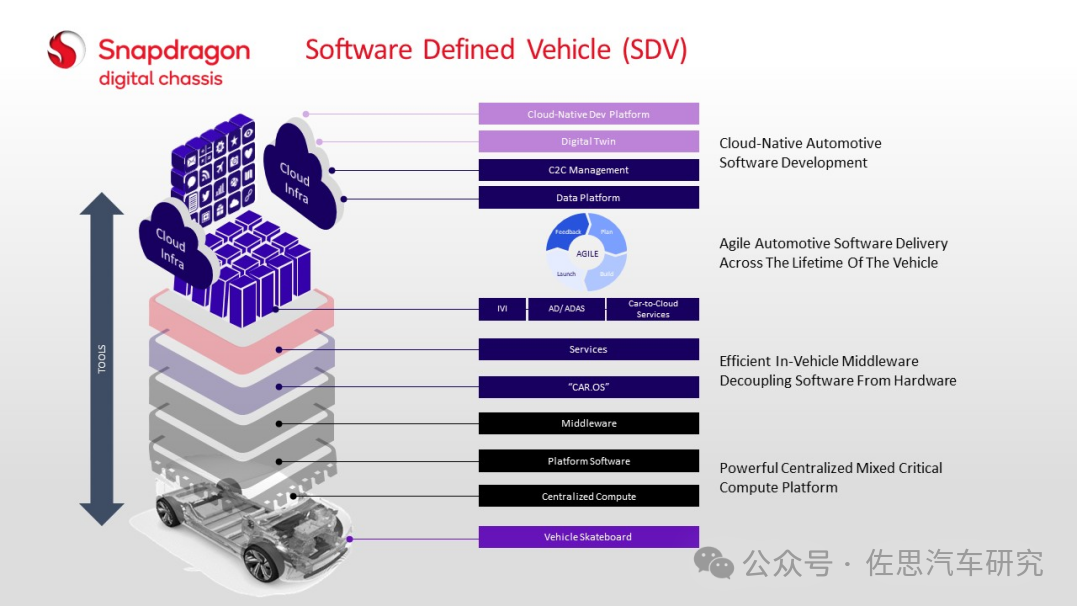
圖片來源:高通
云端的Digital Twin基本上可等同于物理SoC芯片,也有叫虛擬VECU,將SoC完全抽象化。當然英偉達也有Digital Twin,不過那是針對AI領域的,英偉達也有云端仿真測試,即NVIDIA DRIVE Sim,不過那主要還是依靠Omniverse的仿真,不是VECU。Omniverse主要瞄準游戲開發和工業AI領域,與VECU差別很大,順便一提digital twin最早還是英偉達提出來的。
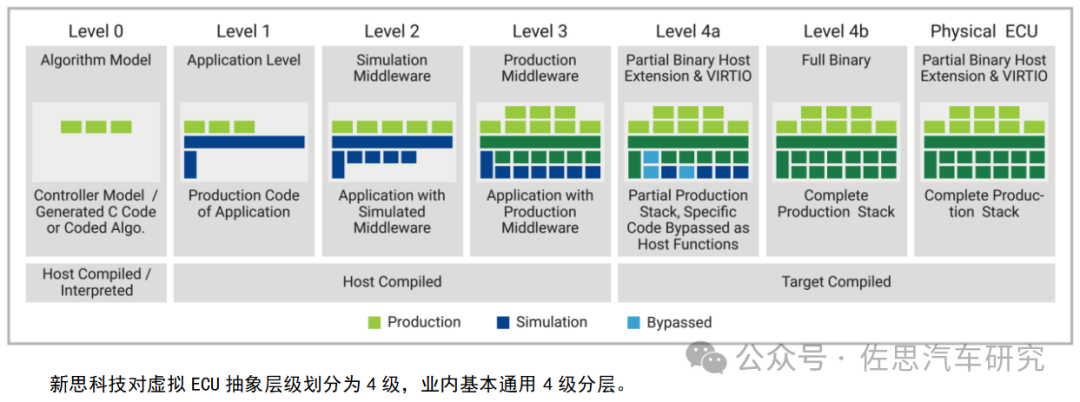
圖片來源:新思科技
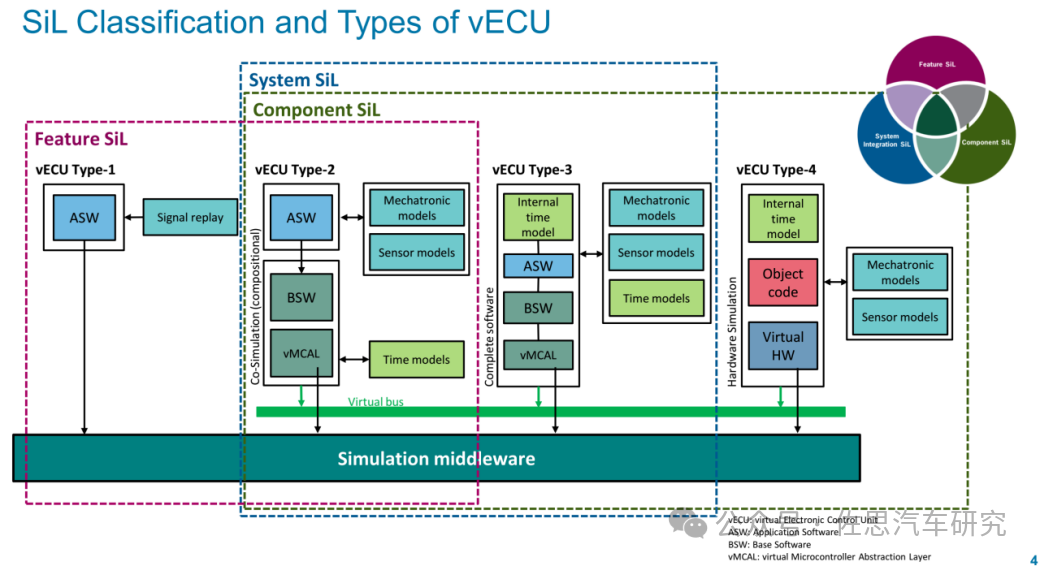
圖片來源:MathWorks
SiL軟件在環環節必備VECU,當然這需要SoC芯片廠家配合,做中央計算軟件定義汽車必備最高的4級虛擬ECU,即全二進制虛擬ECU,實際上這樣需要ARM這樣的內核架構供應商協助。
圖片來源:TATA
高通自5G網絡部署時期對DevOps已經具備非常深厚的基礎,基本上高通把那一套搬到了汽車領域,而芯片從一開始就考慮原生云開發,就考慮了和AWS合作,這是高通足以抗衡英偉達的原因。不過在中國,軟件開發人力資源充沛,軟件開發成本低,且大多是全新開發項目,讓基于原生云和CI/CD(DevOps)的軟件開發優勢不明顯,但對老牌歐美廠家和大型Tier1來說,原生云和CI/CD(DevOps)的軟件開發幾乎是必備的,大眾、寶馬、奧迪、通用、三星哈曼、博世、法雷奧、馬瑞利、松下、ZF、麥格納、電裝、黑莓、大陸汽車、LG基本都是如此。芯片廠家提供必要的支持,芯片廠家目前主要有高通和NXP。這些廠家和Tier1基本都選擇了高通平臺作為主力平臺。
審核編輯:劉清
-
SoC芯片
+關注
關注
2文章
669瀏覽量
37162 -
智能駕駛
+關注
關注
5文章
3008瀏覽量
51280 -
英偉達
+關注
關注
23文章
4086瀏覽量
99173 -
AWS
+關注
關注
0文章
444瀏覽量
26559 -
自動駕駛芯片
+關注
關注
3文章
48瀏覽量
5439
原文標題:高通自動駕駛靠軟件開發革新力壓英偉達
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何構建適合自動駕駛的世界模型?

自動駕駛汽車如何實現自動駕駛

如何設計好自動駕駛ODD?
黃仁勛:未來十年很多汽車是自動駕駛 英偉達發布Alpamayo汽車大模型平臺


不同等級的自動駕駛技術要求上有何不同?
低速自動駕駛與乘用車自動駕駛在技術要求上有何不同?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角

偉創力攜手英偉達與Torc開啟自動駕駛卡車新紀元
NVIDIA Halos自動駕駛汽車安全系統發布




 工商網監
工商網監
評論