 如何在S7-200 SMART CPU斷電重啟后保持運動控制的當前位置值?
如何在S7-200 SMART CPU斷電重啟后保持運動控制的當前位置值?

S7-200 SMART 斷電重啟后由于初始化指令的執行,當前位置會復位為0。要使S7-200 SMART運動控制的當前位置值在CPU斷電重啟后依然保持,可以通過以下的編程來實現。
在此以通過向導生成的運動控制 “ 軸 0 ” 為例來說明如何在 S7-200 SMART CPU 斷電后保持 “ 軸 0 ” 的當前位置值,具體可參考以下三個部分的編程來實現 :
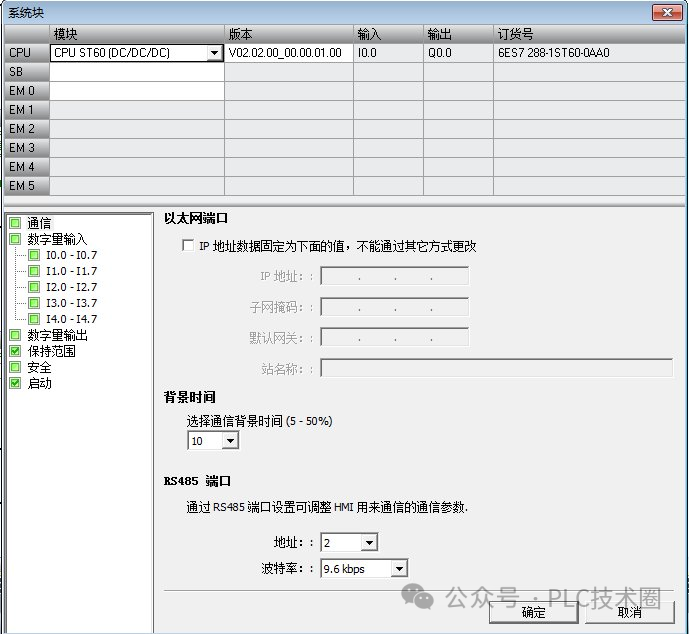
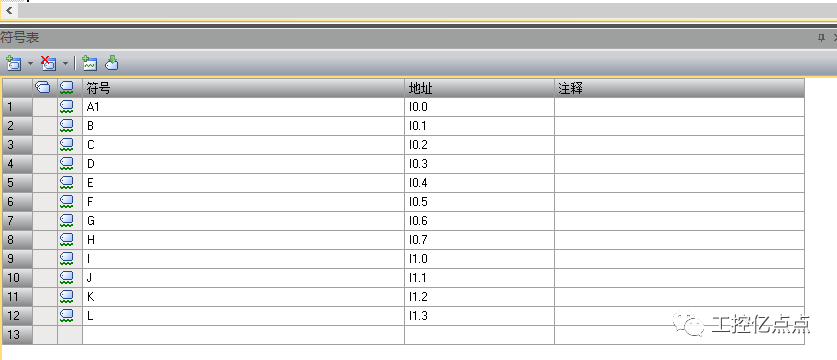
1,設置兩個個斷電保持區域:VD1000、VD1004,如圖所示:
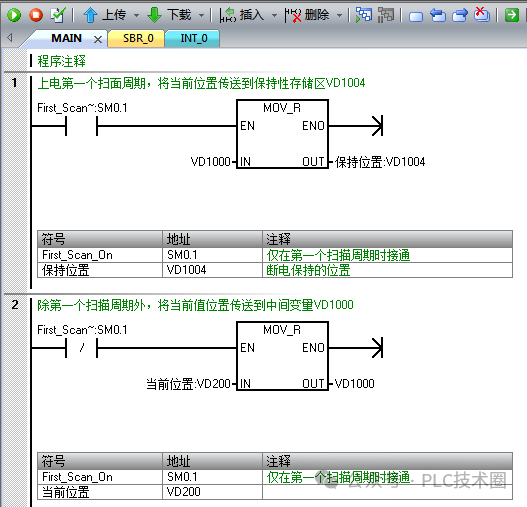
2,將當前值位置值在第一個掃面周期內傳送到保持位置VD1004內,如圖所示:
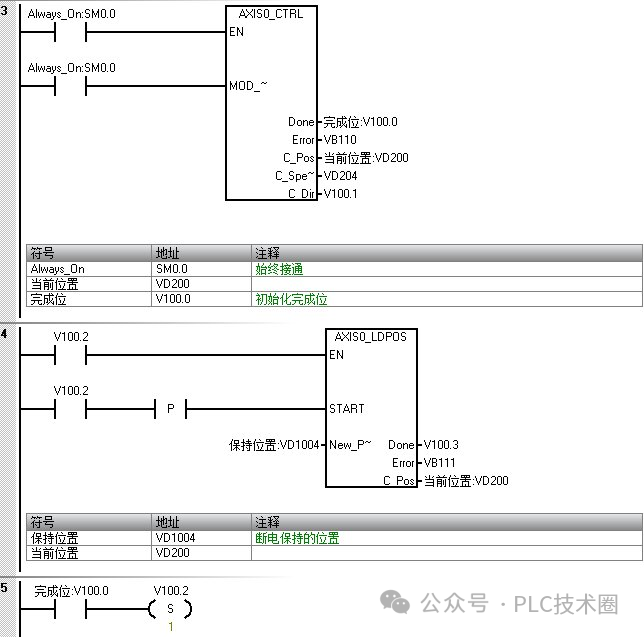
3,當初始化完成后,用初始化指令 “ AXIS0_CTRL ” 的DONE位來觸發修改位置指令 “ AXIS0_CTRL ”,將保持位置VD1000裝載到當前位置VD200,如圖所示:
本例程僅供參考,程序中的CPU版本、類型可能與用戶實際使用不同,用戶可能需要先對例子程序做修改和調整,才能將其用于測試
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
SMART
+關注
關注
3文章
242瀏覽量
46389 -
運動控制
+關注
關注
5文章
821瀏覽量
34534 -
S7-200
+關注
關注
13文章
412瀏覽量
52710
發布評論請先 登錄
相關推薦
熱點推薦
S7-200 SMART 通信端口以及連接方式
每個S7-200 SMART CPU都提供一個以太網端口和一個RS485端口(端口0),標準型CPU額外支持SB CM01信號板(端口1),信號板可通過STEP
?S7-200SMART與S7-200的區別是什么
機型豐富,更多選擇 S7-200 SMART PLC提供不同類型、I/O點數豐富的CPU模塊,單體I/O點數最高可達60點,可滿足大部分小型自動化設備的控制需求。另外,
發表于 12-04 16:21
詳細介紹S7-200 SMART運動向導的組態
S7-200 SMART作為S7-200的升級款,在很多方面都進行了優化,使用更加的方便。其中運動控制的優化最為突出,
S7-200 SMART可實現CPU和HMI之間的多種通信
S7-200 SMART 使用的軟件: STEP7-Micro/WIN SMART 提供了一個用戶友好的環境,供用戶開發、編輯和監視控制應用
S7-200 SMART CPU固件更新V2.7
S7-200 SMART 晶體管輸出類型 CPU 模塊本體最多提供三軸 100 KHz 高速脈沖輸出,通過強大靈活的設置向導可組態為 PWM 輸出或運動
S7-200 SMART使用運動控制面板進行調試
為了幫助用戶更好的開發 S7-200 SMART 的運動控制功能, STEP-7 Micro/WIN S
S7-200 SMART如何下載程序?
S7-200 SMART CPU 可以通過以太網電纜與安裝有STEP7 Micro/WIN SMART 的編程設備進行通信連接。
S7-1200 CPU與S7-200 SMART S7通信
S7-200 SMART CPU 固件版本 V2.0 及其以上,本體集成的 PROFINET 通信接口支持 S7 通信
發表于 05-06 14:49
?1978次閱讀

S7-1500與S7-200 SMART的PROFINET IO通信配置
從 S7-200 SMART V2.5 版本開始,S7-200 SMART 開始支持做 PROFINET IO 通信的智能設備。作為智能設備,S7-

SIMATIC S7-200 SMART系統手冊
S7-200 SMART 系列包括許多微型可編程邏輯控制器 (Micro PLC, Micro Programmable Logic Controller),這些控制器可以
發表于 08-28 15:54
?5次下載



 工商網監
工商網監
評論