 Tesla正在研究基于AI的自動駕駛規劃控制
Tesla正在研究基于AI的自動駕駛規劃控制

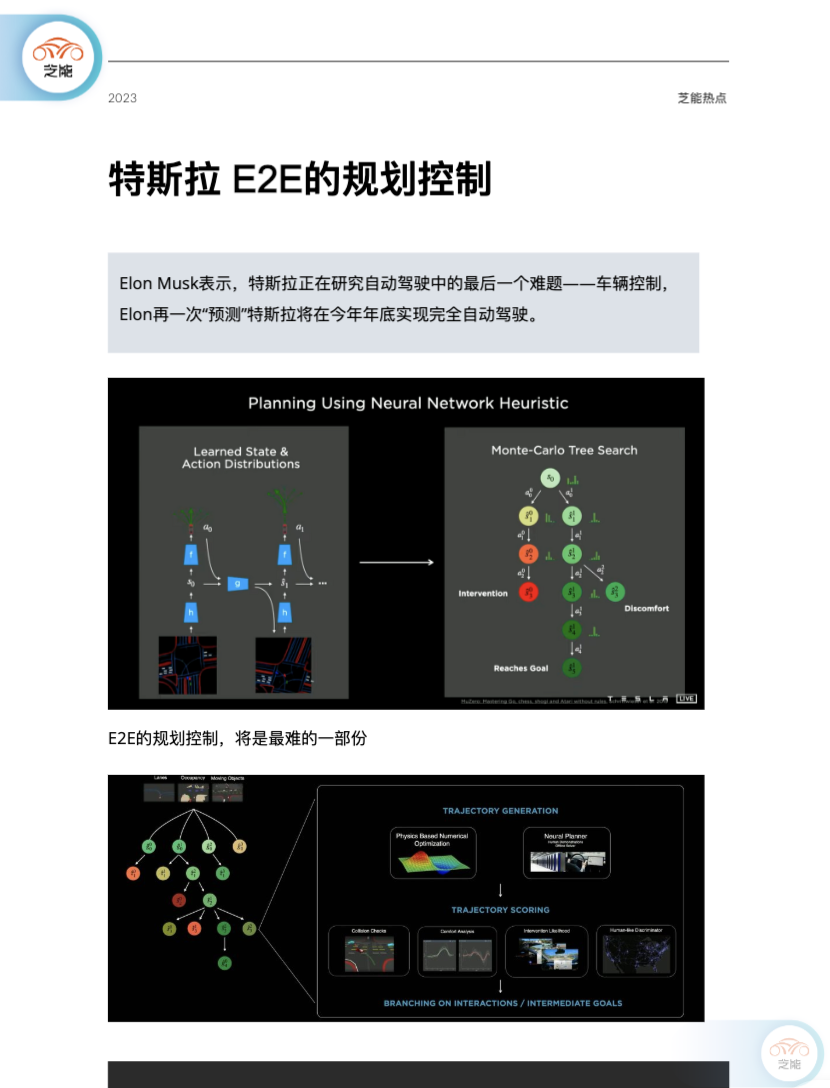
Elon Musk最近宣布,特斯拉正全力攻克自動駕駛技術的最后難關:車輛控制。他再次預言,特斯拉將在今年年底前實現完全自動駕駛。
作為這一計劃的一部分,特斯拉正在轉向更多地依賴神經網絡來控制車輛,以減少C++控制代碼的使用。雖然特斯拉正在積極訓練這些神經網絡,但訓練計算仍然是一個限制因素。
自動駕駛的規劃控制框架和方法,主要包括以下方面:
◎車輛超車規劃與跟蹤
超車是一個涉及車輛側向和縱向運動的復雜任務。超車操作包括換道到超車道、通過前車、換道回原車道等,并需要避免與其他車輛的碰撞。超車規劃涉及車輛動力學和環境約束,以及對周圍障礙物的精確知識。
◎規劃控制整體架構
自動駕駛的規劃控制可分為三個主要層次:任務規劃、行為規劃和運動規劃。任務規劃涉及確定車輛的長期目標和路線,行為規劃涉及制定車輛與其他交通參與者的交互行為模型,運動規劃涉及確定車輛的具體軌跡和動作。
◎規劃方法
常用的規劃方法包括基于圖搜索的算法(如Dijkstra和A*)、采樣點搜索算法(如RRT和PRM)、模型預測控制(MPC)等。其中,MPC是一種基于模型的優化控制方法,可以顯式處理約束條件,并具有較好的控制效果和魯棒性。軌跡產生分為基于傳感器和基于動力學兩類方法,跟蹤則采用幾何法和模型法。幾何法包括Pure Pursuit和Stanley方法,而模型法則是基于MPC的不同方法。
特斯拉希望整個過程能實現端到端(E2E)的控制,這目標頗具野心。近期,特斯拉開始部署超級計算機Dojo,這可能有助于加快訓練支持全自動駕駛(FSD)的神經網絡的速度。Dojo計劃和系統改進速度的加快可能給這一目標帶來一線希望。
不過,只有時間能告訴我們,特斯拉是否能實現其設置的期限并克服自動駕駛的最后一道難題。
-
神經網絡
+關注
關注
42文章
4838瀏覽量
107778 -
AI
+關注
關注
91文章
39793瀏覽量
301424 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179887
原文標題:芝能熱點|Tesla正在研究基于AI的自動駕駛規劃控制
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛端到端為什么會出現黑盒現象?

自動駕駛汽車如何完成超車?

如何設計好自動駕駛ODD?
汽車自動駕駛的太陽光模擬應用研究

VLA能解決自動駕駛中的哪些問題?

麥斯塔MST8011AI-21系列晶振:自動駕駛的高精度“節拍器”
無引導線的左轉場景下,自動駕駛如何規劃軌跡?

端到端自動駕駛相較傳統自動駕駛到底有何提升?

自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

新能源車軟件單元測試深度解析:自動駕駛系統視角

AI將如何改變自動駕駛?
NVIDIA Halos自動駕駛汽車安全系統發布
動量感知規劃的端到端自動駕駛框架MomAD解析




 工商網監
工商網監
評論