") 【深度解析】ZMC300E EtherCAT主站控制器實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)軌跡規(guī)劃原理及應(yīng)用
【深度解析】ZMC300E EtherCAT主站控制器實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)軌跡規(guī)劃原理及應(yīng)用

許多任務(wù)要求控制器實(shí)現(xiàn)貝塞爾等復(fù)雜曲線的軌跡插補(bǔ),并通過(guò)倒圓角算法平滑軌跡中的拐角。本文將重點(diǎn)介紹一般曲線軌跡的插補(bǔ)算法,并基于ZMC300E EtherCAT主站控制器,實(shí)現(xiàn)對(duì)文字輪廓的繪制。
 ?ZMC300E介紹
?ZMC300E介紹
ZMC300E是廣州致遠(yuǎn)電子股份有限公司開(kāi)發(fā)的最新一代智能總線型 EtherCAT 主站控制器,是面向工廠智能化時(shí)代的機(jī)器控制器。其采用工業(yè)領(lǐng)域內(nèi)先進(jìn)的嵌入式 ARM 方案,集實(shí)時(shí)操作系統(tǒng)、智能算法于一身,以 EtherCAT 工業(yè)以太網(wǎng)協(xié)議為向?qū)В梢钥焖佟⒂行А⒈憬莸臉?gòu)建數(shù)控智能化設(shè)備,以適應(yīng)工廠智能化、信息化產(chǎn)業(yè)的變革。ZMC300E采用工業(yè)領(lǐng)域內(nèi)先進(jìn)的嵌入式 ARM 方案,使用TI的Cortex-A8內(nèi)核的AM335X應(yīng)用處理器為核心,配合Xenomai高實(shí)時(shí)性Linux系統(tǒng),精心設(shè)計(jì)了一路EtherCAT口作為主站使用,其通訊可實(shí)現(xiàn)ms周期任務(wù)抖動(dòng)±15us以內(nèi),可滿足運(yùn)動(dòng)控制器的高實(shí)時(shí)性要求。為了滿足不同的自動(dòng)化應(yīng)用需求,ZMC300E還提供了多種豐富的硬件接口,包含1路CAN、1路485、2路以太網(wǎng)、32個(gè)用戶I/O等等。

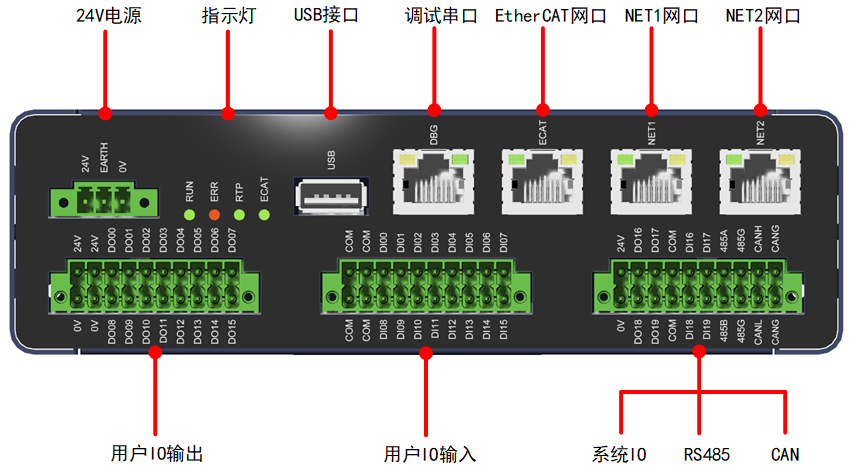
圖1 ZMC300E接口示意圖
ZMC300E EtherCAT主站控制器是為設(shè)備制造商提供多軸數(shù)、多IO點(diǎn)數(shù)控制的新一代可靠智能的運(yùn)動(dòng)控制解決方案,可以廣泛應(yīng)用于注塑行業(yè)、沖壓行業(yè)、車床行業(yè)、搬運(yùn)碼垛、關(guān)節(jié)機(jī)器人、噴涂、玻璃機(jī)、壓鑄機(jī)、包裝設(shè)備、3C設(shè)備、鋰電池設(shè)備、紡織、流水線工作站、非標(biāo)自動(dòng)化裝備、特種機(jī)床等高端設(shè)備應(yīng)用。 ?插補(bǔ)算法插補(bǔ)算法根據(jù)給定的信息進(jìn)行數(shù)字計(jì)算,不斷計(jì)算出參與運(yùn)動(dòng)的各坐標(biāo)軸的進(jìn)給指令,然后分別驅(qū)動(dòng)各自相應(yīng)的執(zhí)行部件產(chǎn)生協(xié)調(diào)運(yùn)動(dòng),以使被控機(jī)械部件按理想的路線與速度移動(dòng)。插補(bǔ)最常見(jiàn)的兩種方式是直線插補(bǔ)和圓弧插補(bǔ)。插補(bǔ)運(yùn)動(dòng)至少需要兩個(gè)軸參與,進(jìn)行插補(bǔ)運(yùn)動(dòng)時(shí),首先需要建立坐標(biāo)系,將規(guī)劃軸映射到相應(yīng)的坐標(biāo)系中,運(yùn)動(dòng)控制器根據(jù)坐標(biāo)映射關(guān)系,控制各軸運(yùn)動(dòng),實(shí)現(xiàn)要求的運(yùn)動(dòng)軌跡。
目前,ZMC300E支持下面列出的軌跡插補(bǔ)算法:包括直線、平面圓弧、空間圓弧、螺旋線、漸開(kāi)線、橢圓弧和貝塞爾曲線等。
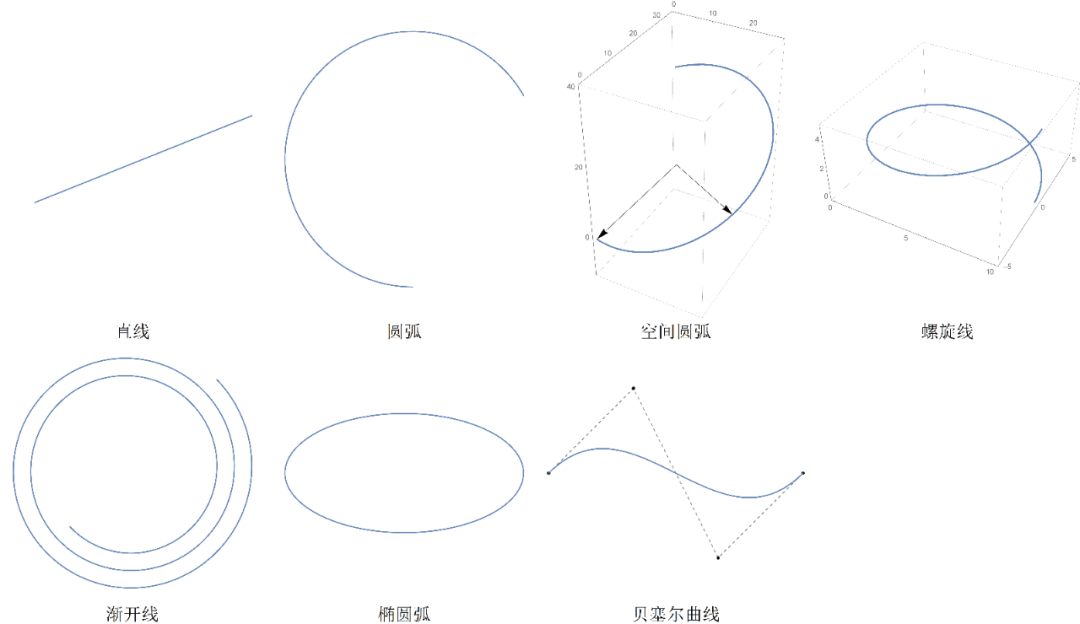 圖2 軌跡插補(bǔ)算法示意圖線運(yùn)動(dòng)的插補(bǔ)運(yùn)動(dòng):由起始點(diǎn)處沿 X 方向走一小段(給一個(gè)脈沖當(dāng)量軸走一段固定距離),發(fā)現(xiàn)終點(diǎn)在實(shí)際輪廓的下方,則下一條線段沿 Y 方向走一小段,此時(shí)如果線段終點(diǎn)還在實(shí)際輪廓下方,則繼續(xù)沿 Y 方向走一小段,直到在實(shí)際輪廓上方以后,再向 X 方向走一小段,依次循環(huán)類推,直到到達(dá)輪廓終點(diǎn)為止。
圖2 軌跡插補(bǔ)算法示意圖線運(yùn)動(dòng)的插補(bǔ)運(yùn)動(dòng):由起始點(diǎn)處沿 X 方向走一小段(給一個(gè)脈沖當(dāng)量軸走一段固定距離),發(fā)現(xiàn)終點(diǎn)在實(shí)際輪廓的下方,則下一條線段沿 Y 方向走一小段,此時(shí)如果線段終點(diǎn)還在實(shí)際輪廓下方,則繼續(xù)沿 Y 方向走一小段,直到在實(shí)際輪廓上方以后,再向 X 方向走一小段,依次循環(huán)類推,直到到達(dá)輪廓終點(diǎn)為止。
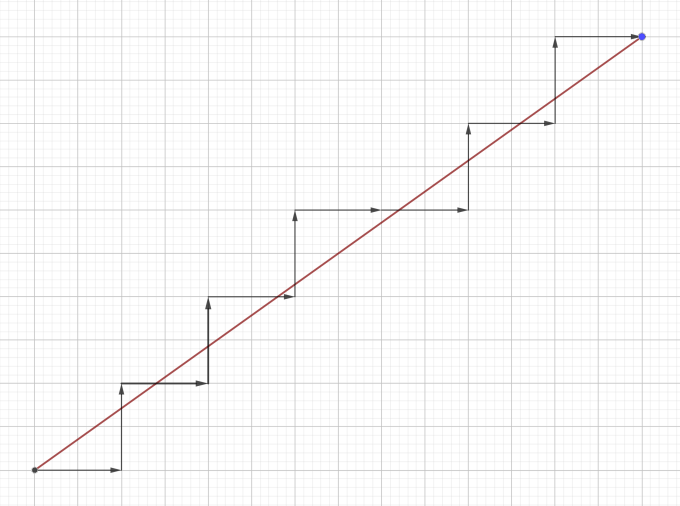
圖3 直線插補(bǔ)示意圖
弧插補(bǔ)與此類似,也是通過(guò)沿兩個(gè)方向運(yùn)動(dòng)最終到達(dá)輪廓終點(diǎn),其示意圖如下。
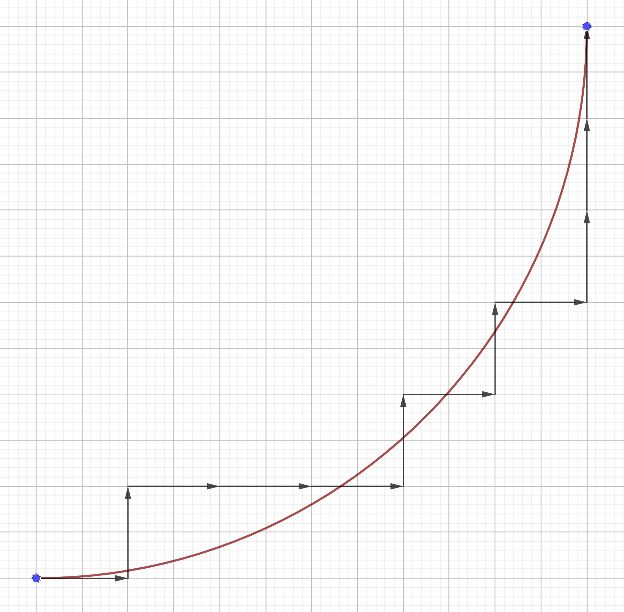
圖4圓弧插補(bǔ)示意圖
而對(duì)于橢圓弧來(lái)說(shuō),我們需要根據(jù)每一個(gè)時(shí)間段移動(dòng)的距離得出完成該位移時(shí)新的坐標(biāo),也就是用直線代替了這段位移,隨后使用直線插補(bǔ)的方法,最終實(shí)現(xiàn)對(duì)一般曲線的插補(bǔ),可見(jiàn)下面的橢圓弧示意圖。其中紅點(diǎn)對(duì)橢圓弧的總位移進(jìn)行了等分,相鄰兩個(gè)紅點(diǎn)間橢圓弧的位移相等。而分段越多,相應(yīng)直線段對(duì)橢圓弧的逼近就越好,此時(shí)在等分后的軌跡上完成插補(bǔ)即可。
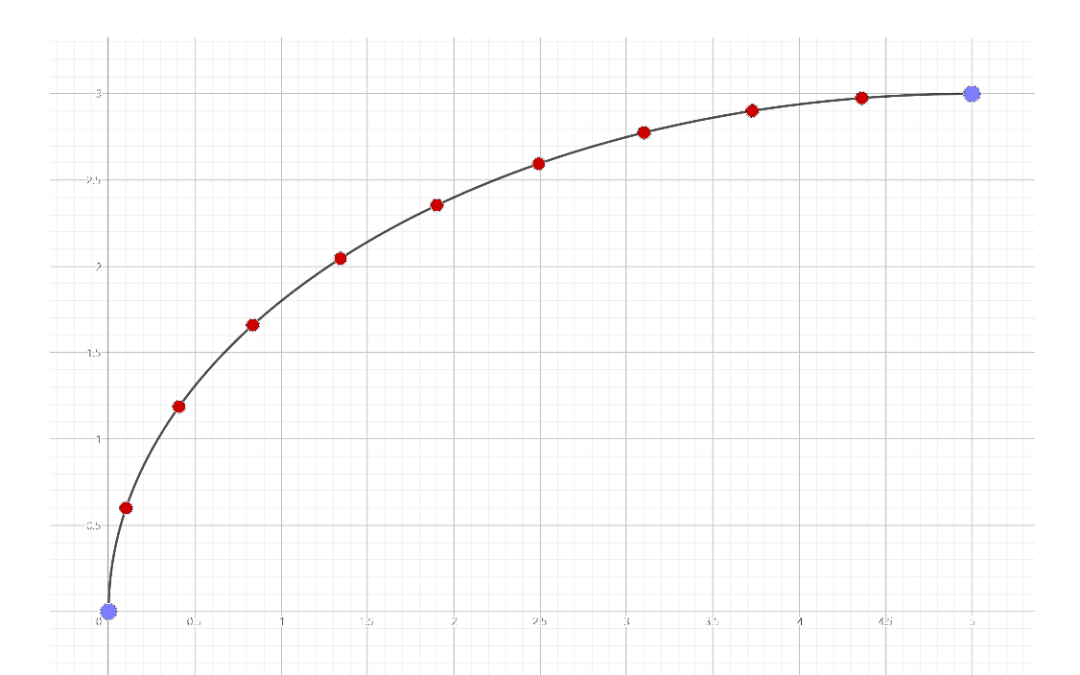
圖5橢圓弧分段示意圖
另外,對(duì)于貝塞爾曲線等一般曲線來(lái)說(shuō),需要依據(jù)一段時(shí)間內(nèi)的位移得出其對(duì)應(yīng)的坐標(biāo),隨后采用插補(bǔ)進(jìn)而實(shí)現(xiàn)整個(gè)曲線軌跡的跟蹤。
 軌跡前瞻運(yùn)動(dòng)控制器的軌跡前瞻功能可以根據(jù)用戶的運(yùn)動(dòng)路徑自動(dòng)計(jì)算出平滑的速度規(guī)劃,以防止軌跡的拐角處速度過(guò)快。軌跡前瞻包括三種模式:拐角減速、倒角、小圓限速,而這三種模式也可混合使用。拐角減速會(huì)根據(jù)夾角大小確定拐角處的最大速度,倒角則會(huì)設(shè)置前后兩個(gè)軌跡在拐角處的倒角,而小圓限速則會(huì)對(duì)半徑小于設(shè)置值的圓弧軌跡進(jìn)行限速。
軌跡前瞻運(yùn)動(dòng)控制器的軌跡前瞻功能可以根據(jù)用戶的運(yùn)動(dòng)路徑自動(dòng)計(jì)算出平滑的速度規(guī)劃,以防止軌跡的拐角處速度過(guò)快。軌跡前瞻包括三種模式:拐角減速、倒角、小圓限速,而這三種模式也可混合使用。拐角減速會(huì)根據(jù)夾角大小確定拐角處的最大速度,倒角則會(huì)設(shè)置前后兩個(gè)軌跡在拐角處的倒角,而小圓限速則會(huì)對(duì)半徑小于設(shè)置值的圓弧軌跡進(jìn)行限速。
這里給出一個(gè)矩形以倒角圓作為前瞻的示例。一個(gè)普通的矩形軌跡如下圖。
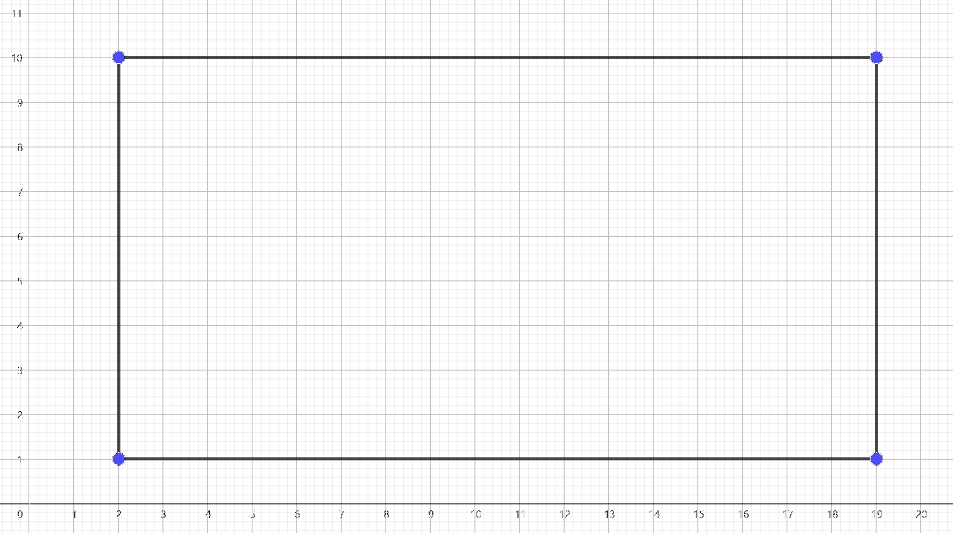
圖6矩形軌跡示意圖
該矩形含有四段軌跡。
若開(kāi)啟倒角圓作為前瞻,則矩形軌跡則會(huì)變?yōu)閳A角矩形,共含有其八段軌跡,包含四段直線和四段圓弧。
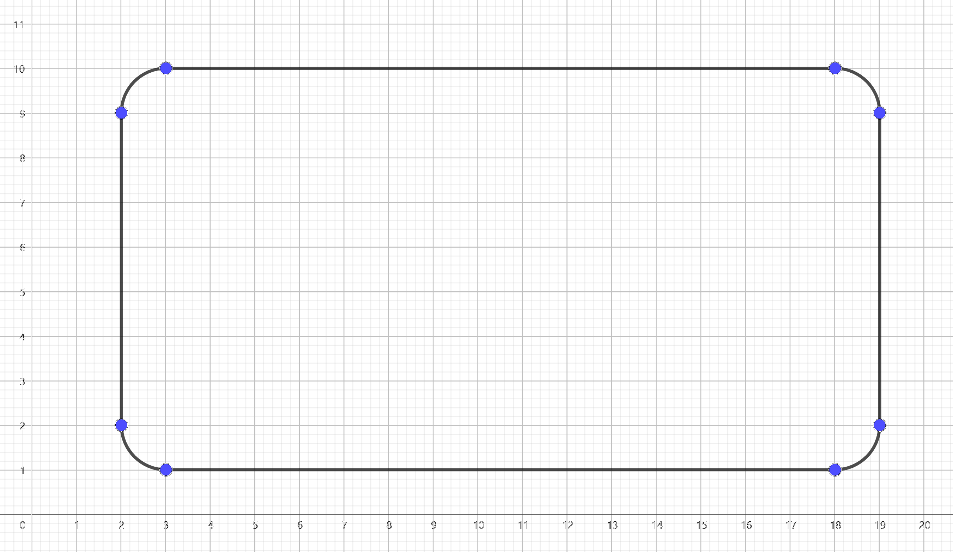
圖7開(kāi)啟運(yùn)動(dòng)前瞻圓角矩形示意圖
開(kāi)啟運(yùn)動(dòng)前瞻中的倒圓角。可以看到,在拐角處原來(lái)的直角彎改變?yōu)閳A弧,整個(gè)運(yùn)動(dòng)軌跡上不再出現(xiàn)直接的拐角,這樣能夠消除軌跡改變時(shí)對(duì)機(jī)械的沖擊。
繪圖這里我們使用上面介紹的軌跡算法,繪制出復(fù)雜圖形。首先我們由一段確定了字體的文字,并根據(jù)其筆畫(huà)生成相應(yīng)的輪廓:包括直線和貝塞爾曲線,這里選擇的文字是“專業(yè)專注,只做第一”。
對(duì)于輸入的文字,我們可以根據(jù)其對(duì)應(yīng)的字體將它的筆畫(huà)分解為曲線或直線,其中曲線可以用貝塞爾曲線表示,這樣就可以得到對(duì)應(yīng)繪圖軌跡。
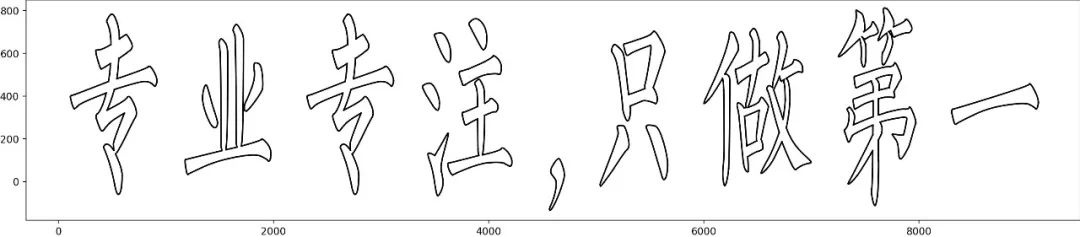
圖8由文字生成軌跡圖像
下圖是漢字“專”的底部輪廓,可以看到由貝塞爾曲線表示的輪廓具有良好的光滑性。
圖9局部筆畫(huà)
可以看到圖片包含眾多不連續(xù)的筆畫(huà),那么,對(duì)于前后兩個(gè)不連續(xù)的筆畫(huà)來(lái)說(shuō)需要提筆和進(jìn)筆,對(duì)應(yīng)z軸上下的運(yùn)動(dòng)。加入筆畫(huà)的連接,可以得到以下的筆畫(huà)繪圖。 圖10?筆畫(huà)繪畫(huà)示意圖
圖10?筆畫(huà)繪畫(huà)示意圖
-
控制器
+關(guān)注
關(guān)注
114文章
17787瀏覽量
193068 -
機(jī)器
+關(guān)注
關(guān)注
0文章
798瀏覽量
41869
發(fā)布評(píng)論請(qǐng)先 登錄
從站固件升級(jí)不用再拆機(jī)?EtherCAT FOE技術(shù)解密

具身機(jī)器人走得穩(wěn)不穩(wěn)?它可以說(shuō)了算!

不懂底層協(xié)議?ZMC系列主站控制器讓你輕松駕馭EtherCAT
如何使用機(jī)器人分析儀EtherCAT-Analyzer抓取主從站數(shù)據(jù)?
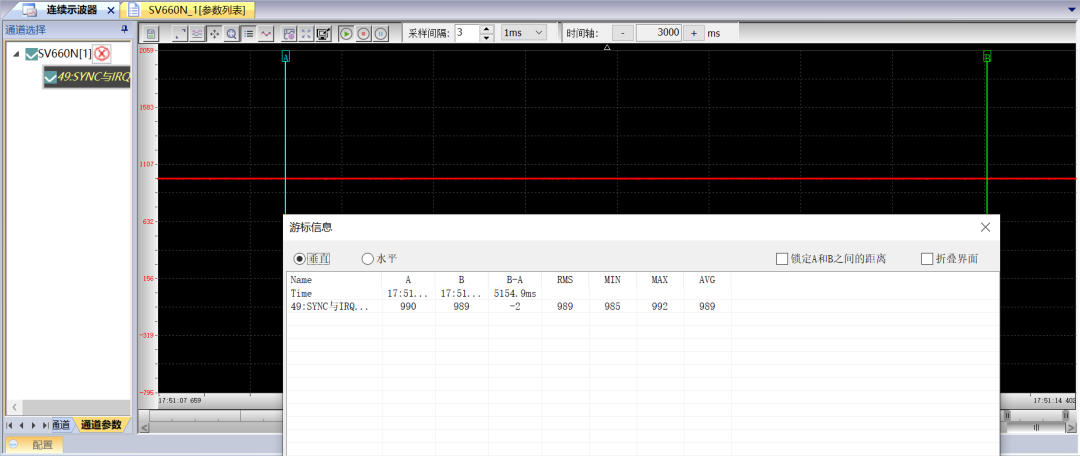
深度解析 | 低抖動(dòng)高精度EtherCAT多軸控制的實(shí)現(xiàn)與實(shí)踐案例
睿擎EtherCAT多軸控制技術(shù):如何實(shí)現(xiàn)低抖動(dòng)高精度運(yùn)動(dòng)控制 | 深度解析
深入ZMC900E:主站控制器編碼器的使用與優(yōu)勢(shì)
解鎖PWM功能:ZMC900E主站控制器的高效應(yīng)用指南
從站熱插拔技術(shù):ZMC900E 助力自動(dòng)化系統(tǒng)靈活擴(kuò)展與穩(wěn)定運(yùn)行
ZMC900E如何實(shí)現(xiàn)多主站協(xié)同控制?
探索工業(yè)自動(dòng)化核心:ZMC 系列 EtherCAT 主站控制器
基于米爾安路飛龍派FPGA FPSoC+移植SOEM實(shí)現(xiàn)EtherCAT主站控制功能
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服實(shí)現(xiàn)速度控制功能

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服操作模式的控制解析

EtherCAT轉(zhuǎn)CANopen轉(zhuǎn)換機(jī)制:運(yùn)動(dòng)控制器與傳感器數(shù)據(jù)交互的核心技術(shù)解析




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論