 激光雷達按探測方式分類有那些?
激光雷達按探測方式分類有那些?

按探測方式分類:
直接探測激光雷達
直接探測型激光雷達的基本結構與激光測距機頗為相近。工作時,由發射系統發送一個信號,經目標反射后被接收系統收集,通過測量激光信號往返傳播的時間而確定目標的距離。至于目標的徑向速度,則可以由反射光的多普勒頻移來確定,也可以測量兩個或多個距離,并計算其變化率而求得速度。
深圳不止技術研發激光雷達VP300是不止技術推出的單線激光雷達產品。該雷達使用脈沖飛行時間法(Pulsed ToF)進行距離測量,其內部結構采用轉鏡式設計,即通過高速旋轉的反射鏡面將測距模塊發射的不可見紅外激光偏轉到不同的角度,從而實現對同一水平面300°范圍內環境輪廓的掃描測量。VP300每秒可輸出 20K 點云數據,同時可滿足客戶最大50米測距需求;采用905nm紅外激光,配合自研信號處理算法,整機防塵防水達到IP65,滿足適用送餐機器人,服務機器人,清潔機器人,無人叉車,AGV小車等場景。
相干探測激光雷達
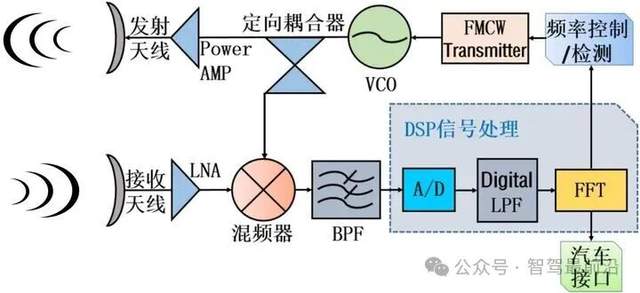
相干探測型激光雷達有單穩與雙穩之分,在所謂單穩系統中,發送與接收信號共用一個光學孔徑,并由發送-接收開關隔離。而雙穩系統則包括兩個光學孔徑,分別供發送與接收信號使用,發送-接收開關自然不再需要,其余部分與單穩系統相同
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
激光雷達
+關注
關注
979文章
4470瀏覽量
196543
發布評論請先 登錄
相關推薦
熱點推薦
自動駕駛激光雷達會傷害人體嗎?
人體造成傷害,那事實果真如此嗎? 什么是激光雷達? 激光雷達作為一種主動感知傳感器,它的核心工作方式是發射大量的激光脈沖,這些脈沖碰到前方的物體后會反射回來,當接收到反射信號后就可以計

雨霧天氣,毫米波雷達表現為什么比激光雷達更好?
在自動駕駛領域,要讓汽車自己“看懂”周圍環境,必須借助激光雷達、毫米波雷達等傳感器。它們雖都用于探測周圍物體,但物理原理和應對惡劣天氣的能力卻有明顯不同。
如何解決激光雷達點云中“鬼影”和“膨脹”問題?
[首發于智駕最前沿微信公眾號]之前在聊激光雷達點云“鬼影”和“膨脹”的文章中( 相關閱讀: 激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?),很多小伙伴都提到一個問題,那就是激光雷達點云中

如何為自動駕駛汽車選擇一款合適的激光雷達?
物體離傳感器多遠。把很多這樣的測距結果按角度組織起來,就能得到一個三維的“點云”,用來表示周圍物體的形狀和位置。激光雷達的主要作用就是讓車知道周圍有哪些東西、在什么位置、大概是什么大小。 ? 它是怎么工作的?

ToF 技術再進化:面陣固態激光雷達在各環境中的可靠性
面陣固態激光雷達的“發家史”激光雷達通常由激光發射、激光接收、光束操縱和信息處理四大系統組成,其工作原理是向目標探測物發送

激光雷達為什么會出現串擾的問題?
[首發于智駕最前沿微信公眾號]自動駕駛技術自提出以來,激光雷達就是非常重要的感知硬件,即便到現如今很多技術方案開始傾向于純視覺時,依舊有很多的車企堅定地選擇激光雷達。激光雷達常見的工作方式

自動駕駛里的激光雷達有何作用?
判斷周圍物體的空間位置與幾何形狀。假期閑敘,就和大家簡單聊聊激光雷達。 激光雷達到底是什么 激光雷達通常由激光發射器、接收器(光電探測器)、

800線!禾賽發布ETX激光雷達
。 ? 作為專為L3/L4級自動駕駛打造的旗艦產品,ETX激光雷達的核心突破在于實現了數字單光子平臺技術的全棧自研。從激光發射、信號處理到單光子接收三大核心模塊,再到激光器、探測器、
發表于 09-13 16:16
?2111次閱讀
激光雷達在自動駕駛汽車的應用
激光雷達 (LIDAR) 是指光探測與測距技術,有時亦稱為飛行時間 (ToF) 或激光掃描儀,是一種探測物體并測量其距離的檢測方式。這一技術


全固態激光雷達為什么遲遲未來?其技術難點是什么?
相比,激光雷達不受光線的影響,探測距離更遠、精度更高、抗干擾能力更強。 上圖示例為車載激光雷達采集到的三維點云。最早應用于無人車的機械式激光雷達借助電機驅動旋轉鏡體,實現360度水平掃
SPAD席卷車載激光雷達市場
,SiPM對于目前主流200線以內的激光雷達更具優勢,這是從產品定義的角度考慮。 ? 而從行業的趨勢來看,像禾賽、速騰聚創等頭部廠商聚焦數字化激光雷達的路線表明,SPAD正在取代SiPM成為激光雷達的接收端傳感器。 ? SiPM
激光雷達(LiDAR)技術方案與工作原理全解析
在自動駕駛、智慧城市、機器人導航等眾多前沿科技領域,激光雷達(LiDAR,Light Detection and Ranging)正扮演著愈發關鍵的角色。它憑借高精度、高分辨率的探測能力,為各類智能

自動駕駛激光雷達:原理、類型與應用梳理
? 1.什么是激光雷達 激光雷達LiDAR的全稱為Light Detection and Ranging 激光探測和測距。 激光雷達的工作原

激光雷達技術在自動駕駛汽車中的應用
在不斷發展的汽車技術領域,LiDAR(光探測和測距)傳感器——也就是“激光雷達”——已成為關鍵組件,隨著汽車行業向自主化邁進,激光雷達傳感器在提供安全導航所需的實時3D地圖方面發揮著關鍵作用。




 工商網監
工商網監
評論