") 如何使用無傳感器歸位來創(chuàng)建硬停止和改變方向
如何使用無傳感器歸位來創(chuàng)建硬停止和改變方向

如何使用無傳感器歸位來創(chuàng)建硬停止和改變方向
AlphaStep AR 系列步進(jìn)電機(jī)具有傳統(tǒng)步進(jìn)電機(jī)通常不提供的擴(kuò)展功能。使用 AR 上的 TLC 輸出,我們可以感知預(yù)設(shè)的扭矩設(shè)置范圍或執(zhí)行扭矩控制功能。
該范圍基于使用 MEXE02 軟件或 OPX-2A 數(shù)據(jù)設(shè)置器設(shè)置的電機(jī)電流。在應(yīng)用過程中,用戶可以打開 T 模式輸入,這將激活扭矩控制模式或推動(dòng)運(yùn)動(dòng)。用戶可以操縱 M0、M1 和 M2 輸入以對(duì)應(yīng)所需的電機(jī)電流設(shè)置或扭矩設(shè)置。
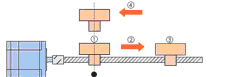
對(duì)于無傳感器歸位例程,我們建議將電流設(shè)置為低設(shè)置,并以慢速向硬停止移動(dòng)。一旦電機(jī)達(dá)到當(dāng)前設(shè)置限值,TCL 輸出將激活以在達(dá)到硬停止時(shí)進(jìn)行通信。然后控制器可以反轉(zhuǎn)操作方向,記下位置,然后照常進(jìn)行。
AR 系列步進(jìn)電機(jī)還具有內(nèi)置的電氣復(fù)位程序。當(dāng)返回輸入被激活(Push-Motion 關(guān)閉)時(shí),驅(qū)動(dòng)器將自動(dòng)使電機(jī)返回到 0 計(jì)數(shù)位置。這個(gè)位置實(shí)際上是第一次給驅(qū)動(dòng)器通電時(shí)電機(jī)的位置。
例子
在絲杠應(yīng)用中,使用 SCX10 系列控制器。
通過從 SCX10 控制器的通用輸出 1 連接到 T 模式輸入,以及從 SCX10 的通用輸出 2 到 AR 驅(qū)動(dòng)器上的 M1 輸入的另一個(gè)連接,我們現(xiàn)在可以控制電流控制模式。來自 SCX10 的通用輸入 1 需要連接到 AR 驅(qū)動(dòng)器的 TLC 輸出。SCX10 的無傳感器歸位代碼類似于以下內(nèi)容:
[1] OUT1 = 1(打開 T 模式)
[2] OUT2 = 1(將電流變?yōu)橹付ㄖ?
[3] VS = 100(將起始速度設(shè)置為 100 Hz)
[4] VR = 500 (將運(yùn)行速度設(shè)置為 500 Hz)
[5] MCN(沿 CCW 方向連續(xù)運(yùn)行電機(jī))
[6] WHILE (IN1 != 1)(連續(xù)運(yùn)行直到設(shè)置輸入 1)
[7] WEND
[8] MSTOP (停止電機(jī))
[9] PC = 0(重置位置計(jì)數(shù)器)
[10] END(無傳感器歸位完成)
這可以很容易地由 PLC 或其他控制設(shè)備控制。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
114文章
17787瀏覽量
193085 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3248瀏覽量
152346 -
無傳感器
+關(guān)注
關(guān)注
0文章
64瀏覽量
13724
發(fā)布評(píng)論請(qǐng)先 登錄
DRV10964:高效低噪的三相無傳感器BLDC電機(jī)驅(qū)動(dòng)器
MCF8329A:助力無傳感器FOC控制的高效解決方案
BLDC無位置傳感器控制方式介紹
探索SSH - G01霍爾效應(yīng)齒輪齒速與方向傳感器:電子工程師的理想之選
自供電+柔性化+AI?未來MEMS傳感器技術(shù)將往這些方向發(fā)展!(前沿趨勢(shì))
?德州儀器DRV10982-Q1無傳感器BLDC電機(jī)驅(qū)動(dòng)器技術(shù)解析
如何使用硬連線 I680C 接口獲取 NuMaker_IoT_M487 板上 BME2 傳感器的芯片 ID?
使用位置傳感器進(jìn)行無刷電機(jī)控制

基于改進(jìn)滑模觀測(cè)器的PMSM無位置傳感器控制
基于鎖相環(huán)的無軸承同步磁阻電機(jī)無速度傳感器檢測(cè)技術(shù)
博士學(xué)位論文-永磁同步電機(jī)脈振高頻信號(hào)注入無位置傳感器技術(shù)研究
無速度傳感器感應(yīng)電機(jī)控制系統(tǒng)轉(zhuǎn)速辨識(shí)方法研究
無刷直流電機(jī)無位置傳感器控制系統(tǒng)仿真研究
無源傳感器維護(hù)成本低,但數(shù)據(jù)處理能力有限,如何權(quán)衡?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論