 普諾飛思傳感器Metavision實現更快速且節能機器觸覺感知
普諾飛思傳感器Metavision實現更快速且節能機器觸覺感知

今天,人工智能技術的發展已經成功將視覺和聽覺等人類重要的感官功能結合到機器人技術中,但賦予機器人予人類觸覺的感知仍是一項不可小覷的挑戰。
觸覺是人類與外界環境進行交互的重要方式之一,觸覺感知也是當前元宇宙發展面臨的一個核心技術挑戰。在工業生產、醫療護理、虛擬現實等領域,機器觸覺可以有效幫助機器突破當前感知功能的局限,并實現更高效安全的人機互動。
例如,在工廠車間,配備電子皮膚的機械臂可以利用觸覺感應識別和抓住物體,并施以適當的壓力防止物體滑落;在醫療護理行業,通過賦予手術機器人觸覺,讓我們更接近手術自動化的實現。..
為了進一步提高了機器人的感知能力,來自新加坡國立大學(NUS)的研究團隊開發了一種新型的電子皮膚,結合基于事件的神經擬態視覺傳感器,實現了更快速且節能的機器觸覺感知。
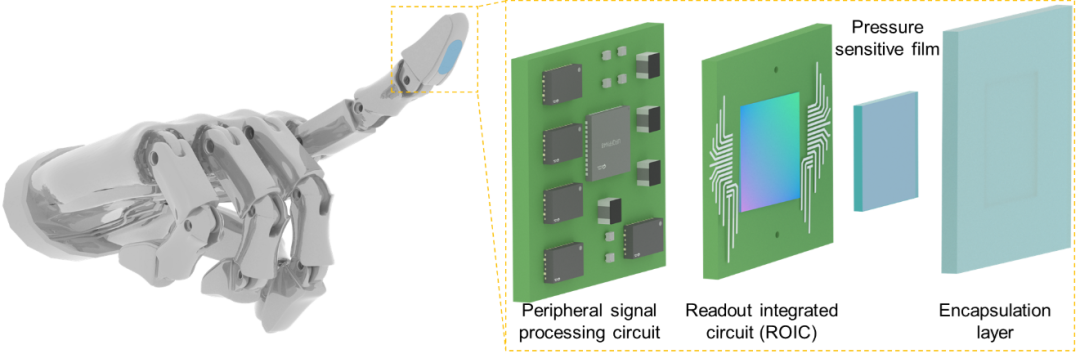
在這項研究中,NUS 研究團隊使用新型的觸覺傳感器 NeuTouch,其結構類似于人的指尖,包含一層“皮膚(Ecoflex)”以及由 3D 打印的“骨骼”。與普諾飛思基于事件的傳感器 Metavision 的像素原理類似,NeuTouch 的觸覺像素(tactile pixels)由事件驅動,異步觸發,因此實現了更高性能的觸覺感知,同時功耗更低,更加節能。
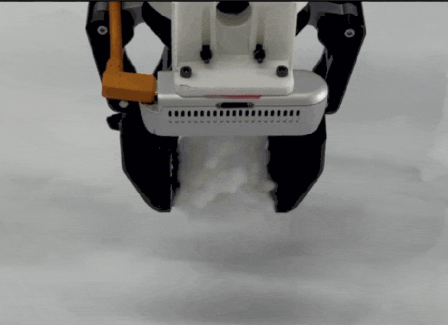
在此基礎上,研究人員將 NeuTouch 與普諾飛思的事件相機結合到一個機械手臂,進行容器分類和旋轉滑移檢測。測試結果發現,結合基于事件的視覺傳感器,機器觸覺系統可以非常快速地檢測到滑動,速度比人類觸覺快 1,000 倍,并且能在 0.08 秒的時間內檢測到旋轉滑動。
此外,由于基于事件的視覺傳感器對環境的光照變化反應非常靈敏,這意味機器人系統無論在低光、強光或是非常高動態范圍的場景中,其感知性能都不會發生改變。
“我們對研究結果感到興奮。這表明神經擬態系統有希望結合多傳感器,解決機器人感知能力難題。這讓我們朝著制造節能而且值得信賴的機器人又邁出了一步”,研究團隊成員之一、NUS 計算機學院助理教授 Harold Soh 表示。
該研究結果表明,基于事件的傳感和機器學習將有望成為下一代高效實時自主機器人的必要基礎。
不同于耗費大量資源的深度學習方法,基于事件驅動的感知提供了一種更高效的替代方法,可保證系統的高能效和低延遲,是實時移動機器人的理想選擇。此外,結合視覺與觸覺感知,機器人可以更好地理解現實環境,從而實現更加安全高效的人機交互。
-
傳感器
+關注
關注
2576文章
55069瀏覽量
791537 -
機器人
+關注
關注
213文章
31097瀏覽量
222370 -
機器學習
+關注
關注
66文章
8554瀏覽量
136989 -
普諾飛思
+關注
關注
0文章
9瀏覽量
3461
發布評論請先 登錄
西湖大學:研發CMOS兼容壓力傳感器陣列,實現精準觸覺感知功能
武漢光谷企業華威科發布最小機器人指尖傳感器

四川大學:研究一種具有四重感知能力的柔性機器人傳感器

進入多模態時代!測量采樣頻率升至1000Hz,三大機器人觸覺傳感器新品發布
人形機器人傳感器產業鏈最新分析:力、觸覺、IMU、視覺傳感器為主流!(全面)

NVIDIA Isaac Sim仿真平臺助力他山科技實現觸覺傳感技術突破
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
最新分析:觸覺傳感器技術演化,電子皮膚市場空間將達155億元
南京工業大學:仿生觸覺傳感系統讓機器人擁有“人類指尖”般的細膩感知
觸覺傳感器已在亞馬遜倉儲機械臂率先商用 新增形式有望加速市場增長節奏

仿生傳感器:讓機器擁有“生命感知”的神奇科技
NVIDIA技術驅動帕西尼觸覺感知與人形機器人智能突破
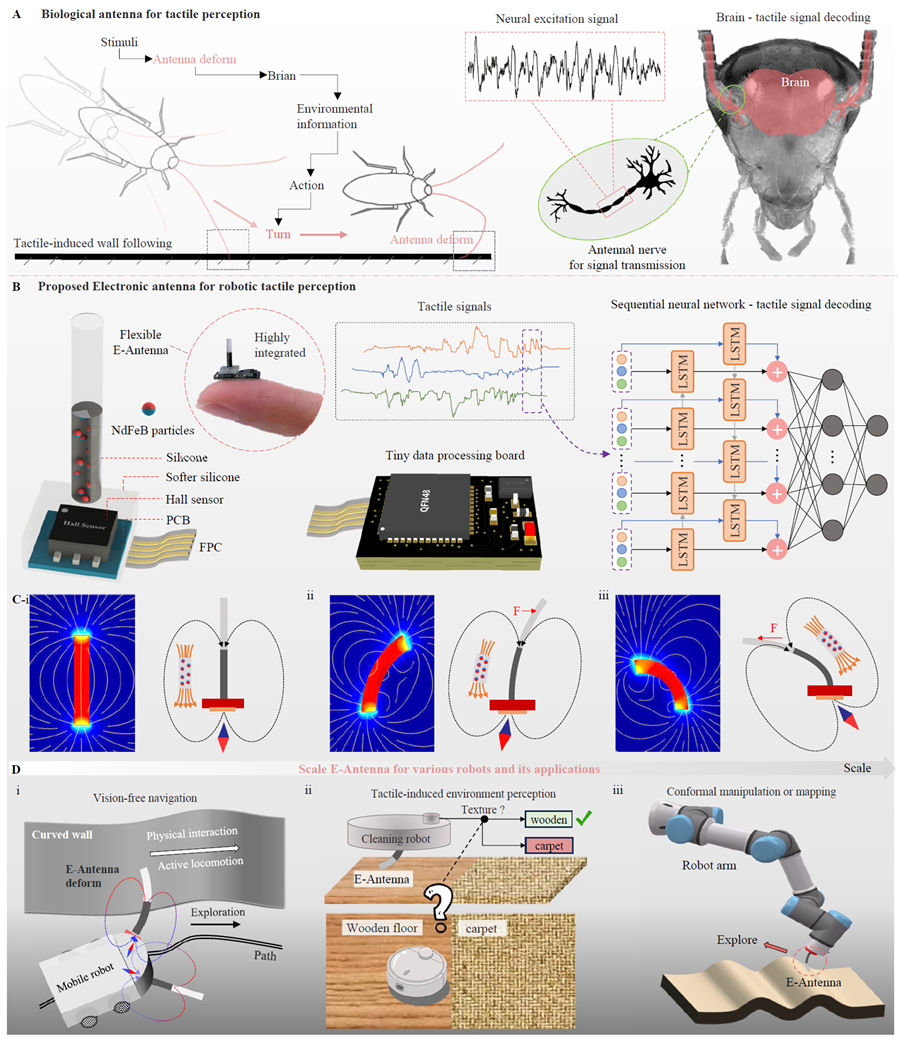
研制仿生電子觸角傳感器,突破無視覺環境感知瓶頸
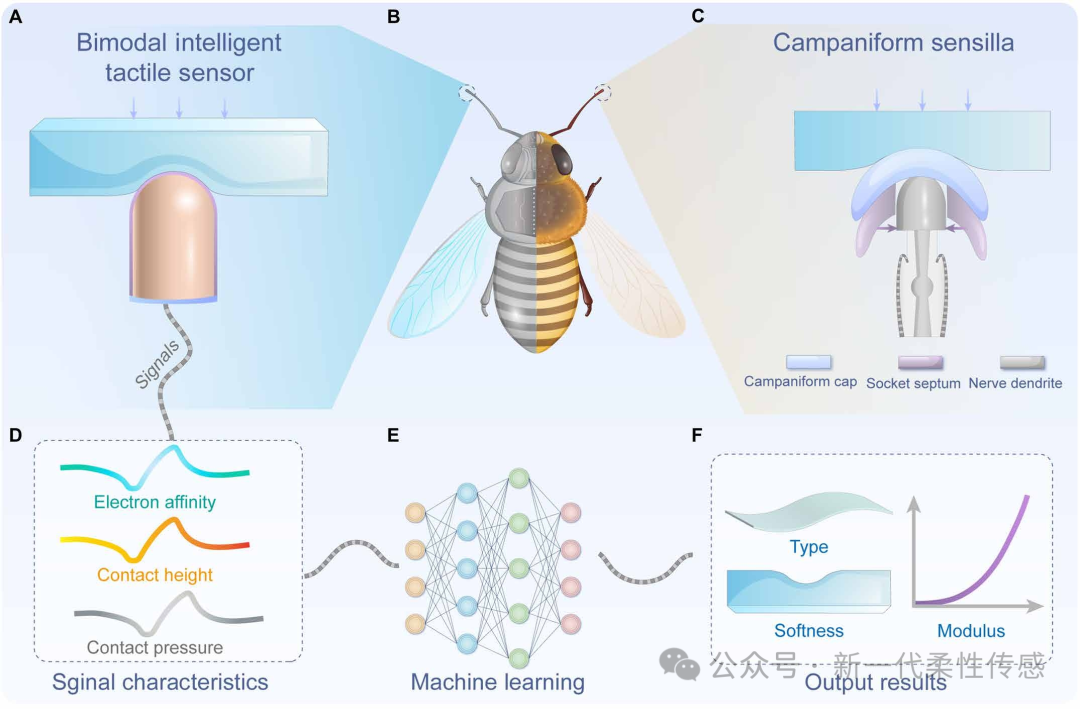
昆蟲觸角啟發研發雙模觸覺傳感器



 工商網監
工商網監
評論