 四川大學:研究一種具有四重感知能力的柔性機器人傳感器
四川大學:研究一種具有四重感知能力的柔性機器人傳感器

在本研究中,作者受自然皮膚感知能力的啟發,提出了一種新型的內在柔性機器人傳感器,其四重感知功能集成于單一設備中,包括空間接近感知、熱接近感知、熱觸覺感知和機械力感知。憑借這種多功能性,機械和熱刺激均可通過接觸和非接觸模式得到良好解析。所制造的傳感器具有良好的柔韌性和內在柔軟性,使其能夠符合復雜的三維曲面。更重要的是,所有機器人傳感器的材料均可完全回收再利用,以構建新一批傳感器,顯著緩解了資源消耗問題及電子廢物帶來的環境危害。作為概念驗證示范,通過將機器人傳感器集成到柔性抓手和機器人手臂上,構建了一個閉環且可靠的人機交互系統。通過利用四重感知功能,成功展示了多種可靠的人機交互場景(例如,人機交互、物體感知與分類、床邊臨床護理等)。本研究為全面的機器人感知提供了一個可行且多樣化的平臺。
圖文簡介

圖1. 機器人傳感器的設計理念及典型響應特性。(a) 具備四重感知功能的機器人傳感器的設計理念與結構布局,用于實現可靠的人機交互。(i) 示意圖展示具有多樣感受受體的天然皮膚的感知能力,用于物體感知與操作。 (ii) 機器人傳感器的組成與結構布局。 (iii) 機器人傳感器的四重感知功能,包括熱接近感知、熱觸感知、空間接近感知和機械力感知。(b) 示意圖展示連續的熱接近與熱觸感知過程及其典型響應行為。 (c) 示意圖展示連續的空間接近與機械力感知過程及其典型響應行為。 (d) 數字圖片展示所制備的機器人傳感器的柔韌性與柔軟性。 (e) 示意圖說明機器人傳感器的可回收性。

圖2. 軟體機器人傳感器的制備與表征。(a) 示意圖,展示軟體機器人傳感器的三維結構布局及其二維截面視圖。(b) 軟體機器人傳感器的實物照片。(c) 軟體機器人傳感器中關鍵組分(即聚乙烯醇PVA、離子液體IL和熱塑性聚氨酯ES-PU)的分子組成與結構。(d, e) 自合成的ES-PU材料的傅里葉變換紅外光譜(FTIR)及凝膠滲透色譜(GPC)譜圖。(f) 光學顯微鏡圖像,顯示軟體機器人傳感器的橫截面形貌。(g) 光學顯微鏡圖像,展示微結構導電層頂部工程化金字塔圖案。(h, i) TPU層、ES-PU層及PVA/IL層的應力-應變曲線與楊氏模量,采用常規的PET和PI薄膜作為對比。(j, k) 數字照片,展示與三維彎曲及動態變化的軟抓手相貼合的軟體機器人傳感器。

圖3. 機器人傳感器的感知機制及性能特征。(a) 示意圖展示了基于熱輻射效應的熱感知機制。 (b, c) 傳感器對接近冷物體(0 °C)和熱物體(65 °C)的響應行為及標定曲線。 (d) 傳感器對從遠處逐漸接近并移開溫暖手掌(距離傳感器1厘米)的響應行為。 (e) 示意圖展示了基于熱傳導效應的熱觸覺感知機制。 (f) 傳感器與不同溫度物體接觸時的標定曲線。 (g) 傳感器在熱觸覺感知中的最低溫度檢測分辨率。 (h) 傳感器對不同穩定環境溫度的響應信號。 (i) 示意圖展示了基于電場耦合效應的空間接近感知機制。 (j) 傳感器在手逐漸接近后又移開的響應行為。 (k) 傳感器的空間接近感知標定曲線。 (l) 傳感器在不同距離下手部反復接近時的信號變化。 (m) 示意圖展示了基于電容參數調制的機械力感知機制。 (n) 傳感器的機械力感知標定曲線。 (o) 傳感器對不同大小穩定機械力的響應行為。 (p) 傳感器在5000次加載-卸載測試中的重復性和可靠性。

圖4. 機器人傳感器在與人體碰撞預警及人工智能輔助物體識別中的應用。(a) 示意圖,顯示集成機器人傳感器的可編程機器人臂系統,用于人機交互(HRI)。(b) 展示傳感器集成在夾持器指端(用于物體操作監測)和夾持器底座(用于危險碰撞預警)上的情況。(c) 當人手逐漸接近機器人臂并在臨界距離1厘米處停止時,傳感器的響應信號。(d) 軟夾持器在抓取、夾持及釋放黃瓜過程中的傳感器響應行為。(e)用于物體識別的卷積神經網絡(CNN)模型結構示意圖。(f) 用于測試的20個不同日常物體的數字圖片。(g) 顯示20個物體識別準確率的混淆矩陣。

圖5. 機器人傳感器在熱接近感知、熱觸覺感知和人機交互系統反饋控制中的應用。(a, b) 示意圖和框圖展示了閉環控制機器人系統的主要組成部分和工作原理,包括傳感器數據采集與傳輸、傳感器數據處理與可視化、機器人臂運動的閉環控制以及氣動夾具的閉環控制功能。(c) 六個不同溫度(?40、0、25、50、75、100 °C)的水杯的光學和紅外圖像。(d) 照片顯示軟夾具以最小距離1厘米接近物體進行熱接近感知。(e) 在接近六個不同溫度水杯時傳感器的響應信號。具有特定危險溫度的物體(?40 °C在深藍區域和100 °C在深橙區域)可以被識別,軟夾具在后續過程中不會抓取這些危險物體。(f) 照片顯示軟夾具抓取目標物體。(g–j) 在重復抓取四個安全溫度物體(0、25、50和75 °C)50次時的傳感器響應信號。(k) 示意圖展示機器人系統在床邊臨床護理中的潛在應用場景。(l, m) 照片顯示配備作者傳感器的機器人系統,從四個不同溫度的水杯中識別并取用適合患者的水(例如,25 °C)。

圖6. 機器人傳感器的回收過程。(a) 示意圖展示了基于環保方法的機器人傳感器的完整回收過程。(b) 數字圖片展示了來自傳感器的回收產品,包括ES-PU乙醇溶液、PVA/IL水溶液、銀漿碎片和TPU基材。這些回收產品可以再利用于重構新一批機器人傳感器。
來源:未來傳感技術
-
機器人
+關注
關注
213文章
31246瀏覽量
223112 -
柔性機器人
+關注
關注
1文章
40瀏覽量
5048 -
柔性傳感器
+關注
關注
1文章
121瀏覽量
4868
發布評論請先 登錄
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
安森美傳感器芯片創新突破機器人感知邊界
2025四川省智能傳感器產業供需對接大會暨第二屆西部智能傳感器產業大會圓滿落幕
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
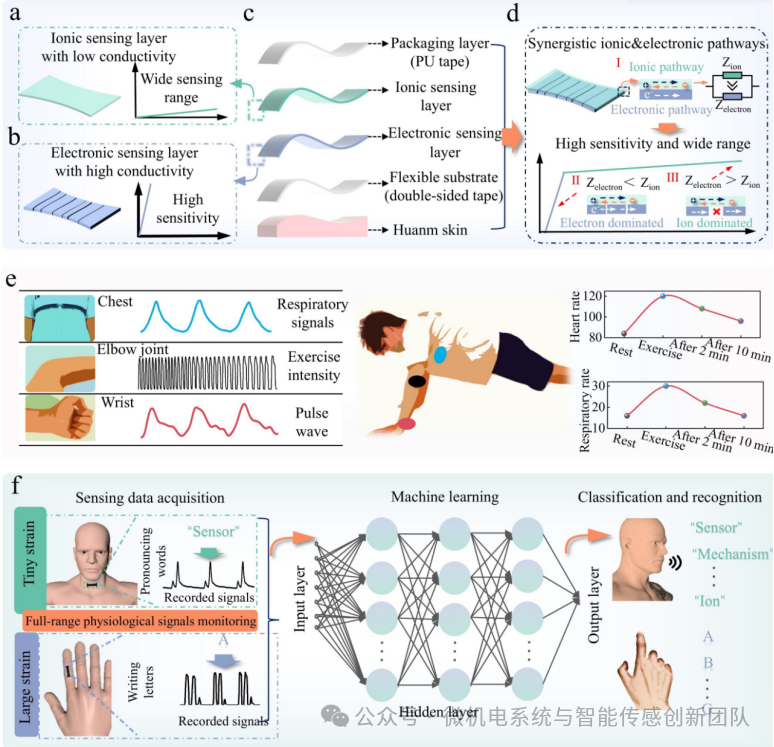
四川大學:協同離子-電子傳輸應變傳感器實現寬工作范圍內超高且可調靈敏度
明治科普 | 讓機器人擁有&quot;觸感&quot;:電子皮膚如何實現?

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
軟通睿聯與四川大學信息分析與決策研究所達成戰略合作
成都華微與四川具身機器人深化合作
四川大學商學院EDP培訓中心走進云知聲
0.01°微小變化精準捕捉,機器人姿態傳感器革新

華電四川公司與華為達成戰略合作
四川大學OpenHarmony技術俱樂部正式揭牌成立

四川大學:研發柔性應變/壓力傳感器助力個人康復訓練和醫療健康監測



 工商網監
工商網監
評論