完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 隔離電路

電路隔離的主要目的是通過隔離元器件把噪聲干擾的路徑切斷,從而達到抑制噪聲干擾的效果。在采用了電路隔離的措施以后,絕大多數電路都能夠取得良好的抑制噪聲的效果,使設備符合電磁兼容性的要求。
電路隔離的主要目的是通過隔離元器件把噪聲干擾的路徑切斷,從而達到抑制噪聲干擾的效果。在采用了電路隔離的措施以后,絕大多數電路都能夠取得良好的抑制噪聲的效果,使設備符合電磁兼容性的要求。電路隔離主要有:模擬電路的隔離、數字電路的隔離、數字電路與模擬電路之間的隔離。所使用的隔離方法有:變壓器隔離法、脈沖變壓器隔離法、繼電器隔離法、光電耦合器隔離法、直流電壓隔離法、線性隔離放大器隔離法、光纖隔離法、A/D轉換器隔離法等。
電路隔離的主要目的是通過隔離元器件把噪聲干擾的路徑切斷,從而達到抑制噪聲干擾的效果。在采用了電路隔離的措施以后,絕大多數電路都能夠取得良好的抑制噪聲的效果,使設備符合電磁兼容性的要求。電路隔離主要有:模擬電路的隔離、數字電路的隔離、數字電路與模擬電路之間的隔離。所使用的隔離方法有:變壓器隔離法、脈沖變壓器隔離法、繼電器隔離法、光電耦合器隔離法、直流電壓隔離法、線性隔離放大器隔離法、光纖隔離法、A/D轉換器隔離法等。
什么是隔離?為什么需要隔離?
隔離是一種防止電流在兩個通信點之間流動的手段。一般在兩種情況下需使用隔離:第一種是可能會出現導致設備受損或人員傷害的浪涌電流;第二種是互連涉及到不同的地電位,需要避免接地環路中斷。無論何種情況,隔離的作用都是防止電流在兩點之間流動,但允許數據或功率流動。
使用隔離的常見應用有哪些?
隔離通常用于涉及到高壓、高速/高精度通信或長距離通信的應用。常見的應用包括:
工業I/O系統
接口
電源/調節系統
電機控制/驅動系統
儀器儀表
這些應用可以出現在眾多市場領域,包括:
醫療設備
通信網絡
等離子顯示面板
混合動力汽車
隔離特性是如何規定的?
隔離器的隔離特性可以通過多種方式來規定,包括:
隔離額定值
工作電壓(或額定電源電壓)
瞬變抗擾度(共模抑制)
成功絕隔離器緣隔離柵的一端,使其免受另一端高壓影響的能力,一般用隔離器的隔離額定值及其最大工作電壓(或額定電源電壓)來描述。此外,存在共模瞬變的情況下,隔離器繼續將信號正確傳送到隔離柵另一端的能力,一般用其瞬變抗擾度(或共模抑制)來描述。下面將逐一說明這三個參數。
什么是隔離額定值?
隔離器的隔離額定值(也稱為測試電壓)衡量它耐受短時間共模電壓差的能力。該參數通常用60 Hz RMS值來規定,表示能夠安全施加于器件輸入端與輸出端之間并持續1分鐘的電壓有多大。隔離器件的常見隔離額定值是2.5KVRMS。有些器件也提供3.75KVRMS或更高的額定值。隔離額定值不是描述能夠將多大的電壓長期連續安全地施加于器件,這需要用“工作電壓”或“額定電源電壓”來描述。
什么是工作電壓和額定電源電壓?
工作電壓或額定電源電壓表示器件能夠長期連續承受的最大穩態電壓。典型值為100 - 600VRMS。
工作電壓與隔離額定值之間有何關系?
給定工作電壓與所需測試電壓之間的關系比較復雜,與應用、共模電壓瞬變的幅度(設施類別)、環境清潔度(污染程度)和所需的絕緣類型(絕緣水平)有關。依據IEC 1010-1(測量與控制設備國際標準)舉例說明:對于一個設施類別為II、污染程度為2、基本絕緣、工作電壓為300 VRMS的測量與控制應用,其要求的測試電壓為1.35KVRMS。這意味著,適合該應用的隔離器件必須支持至少300 VRMS的穩態共模電壓差和至少1.35KVRMS的瞬變共模電壓差。工作電壓與隔離額定值之間的關系由目標終端設備適用的特定安全標準來規定。
基本絕緣與雙倍(或強化)絕緣之間有何區別?
一般而言,可以通過適當的間隙(與帶電部件的物理間隔)或兩種絕緣水平之一來提供防電擊保護。這兩種絕緣水平就是基本絕緣和雙 倍(或強化)絕緣。所需的絕緣水平由相關的電壓水平以及是否存在從可接觸部件到大地的連接來確定。與提供基本絕緣的隔離器相比, 提供雙倍或強化絕緣的隔離器對其測試電壓及其輸入到輸出間隔的要求一般更高。所需的絕緣水平由目標終端設備適用的特定安全標準 來規定。
什么是瞬變抗擾度和共模抑制?
隔離器的瞬變抗擾度表示器件在維持正確信號傳輸的同時,能夠承受多快的輸入輸出間共模瞬變。許多隔離器對該參數不作規定,但有 些隔離器的額定值為5 - 25 KV/μs。所有iCoupler產品的瞬變抗擾度規格至少為25 KV/μs。
考慮隔離器件時還有哪些其它重要參數?
理想的隔離器功耗為0,不會產生信號誤差,并且支持任何類型的輸入信號。因此,隔離器的重要性能指標包括:
所需的電源電流、輸入信號電流或輸入驅動電流
器件的傳播延遲
脈沖寬度失真:信號的輸出脈沖寬度偏離輸入脈沖寬度的程度
數據速率:器件能夠支持的最大信號數據速率
電源和信號電壓范圍:器件能夠支持的電壓范圍
工作溫度:器件能夠支持的溫度范圍
對于特定用戶,上述指標中哪些指標重要取決于具體應用。在特定應用中,常常是某些參數比較重要,其它參數相對不重要。
其它重要特性包括:隔離器的上電/關斷特性,存在輸入噪聲時的性能,及其存在直流輸入或失電后的性能。無論何種情況,隔離器的 輸出都應當妥善地反映正確的輸入狀態。

磁致伸縮位移傳感器利用磁致伸縮效應測位移,需設計隔離電路處理信號,包括電氣隔離、信號調理、保護等,具體實現需根據傳感器特性和應用場景選擇合適方案。
在現代電氣系統中,電氣隔離器是一種至關重要的設備或裝置。它不僅能夠在電路中實現電路之間的隔離,還能有效防止電流、電壓或干擾信號從一個電路傳播到另一個電路...

簡單說來,隔離式電源轉換器通過電氣和物理方法將電路分隔為兩個部分,把輸入與輸出隔離開來,從而防止輸入與輸出之間產生直接電流流動(通常會利用變壓器實現)。
接地變壓器是一種特殊的變壓器,其主要作用是將電流回路的其中一端接地,從而保證電流回路的安全性。
隔離開關的作用: 隔離開關是一種用于隔離電路的開關裝置,主要用于對電路進行切斷、斷開,以確保電路在維護、修理和調試等工作期間處于安全狀態。其作用主要體現...
在仿真過程中,由于仿真模型的不連續性,或者模型沒有適當地表征/參數化,或者當求解器無法求解控制模型行為的方程時,可能就會出現仿真的收斂問題。
雖然隔離能有效抑制高共模電壓,但總線上還可能存在浪涌、雷擊及短路等問題存在,所以在EMC等級要求比較高的系統中,需要在總線上再采取一定的保護措施。
Power Integrations推出SCALE-iFlex XLT系列雙通道即插即用型門極驅動器
深耕于中高壓逆變器應用門極驅動器技術領域的知名公司Power Integrations(納斯達克股票代號:POWI)今日宣布推出SCALE-iFlex ...
光耦的高隔離度特點及其應用 隨著電子技術的發展,光耦作為一種常見的隔離電路元件,廣泛應用于各個領域。其獨特的優勢在于其高隔離度特點,能夠實現輸入和輸出之...

DC電源模塊隔離電路是電子設備中常用的一種電路。它的作用是在設備中兩個電路之間建立一定的隔離,以保證兩個電路之間不會傳遞電流或信號。這種隔離電路的影響可...
電容400uf什么意思? 電容400uF是電容器的一種,它是一種以存儲能量為主要功能的電器元件。在電子電路中,電容器是最為常見的元件之一,可以用來實現不...
真空開關真空度的檢測方法? 真空開關是一種用于高電壓電力系統中的重要組件,通常用于控制、保護、隔離電路。它的主要組成部分是真空密封的容器和具有滅弧能力的...
另外,光電晶體管和紅外 LED 之間的空間是透明的非導電材料,隔離了兩個不同的電路。LED 和光電晶體管之間的中空空間可以使用玻璃、空氣或透明塑料制成,...
以前的卡拉OK點歌系統大部分只是純粹的唱唱歌,功能比較單調。如今,隨著90后以及00后消費群體逐步成為KTV消費的主力軍,他們對KTV的功能要求越來越高...
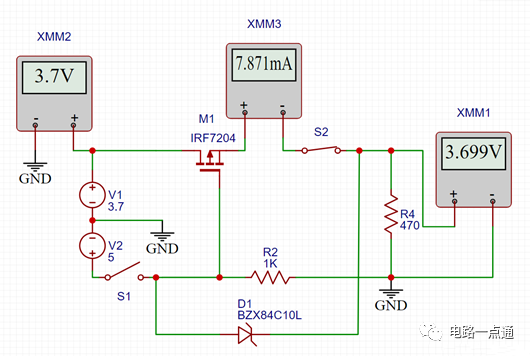
本電路是一個由高功率開關MOSFET組成的H電橋,由低壓邏輯信號控制,如圖1所示。該電路為低電平邏輯信號和高功率電橋提供了一個方便的接口。

本文給出的電壓測量電路能夠對電動汽車中的鋰電池進行安全、準確的電壓采集,也充分利用了光耦繼電器AQW214的各個特點;基于線性光耦HCNR201的電壓隔...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023036445號-105-1
工商網監
湘ICP備2023036445號-105-1