 詳解DSP的機載伺服控制系統設計
詳解DSP的機載伺服控制系統設計

摘 要: 針對機載天線實時跟隨頭戴設備轉動,提出了一種機載伺服系統的控制方案,系統以TMS320F2812 DSP為運算核心,通過RS-485連接絕對值光電編碼器代替測速機對轉臺進行測速,并采用具有退積分飽和功能的數字PID增量型控制算法進行速度閉環控制,使系統具有了很好的動態性能和抗干擾性能。而且針對項目的實際還提出了一種先速度后位置的隨動控制策略,經實際驗證和測試,取得了很好的應用效果,不僅達到了系統的技術指標而且還提高了系統的魯棒性。
伺服系統本質上就是一種隨動系統,本文介紹的伺服系統為一維伺服轉臺,用于控制一種機載天線實時跟隨另一種瞄準設備,時刻保持機載天線和瞄準設備在同一位置上,以達到微波系統通信的目的。瞄準設備電機運行速度常常不停變化,為使系統的輸出以一定精度跟隨瞄準設備的變化,與一般電機調速系統相比,其對轉矩和速度的動靜態控制特性要求要嚴格得多。
瞄準設備運行軌跡比較復雜,對伺服的跟蹤性能的影響也比較大,該隨動系統由于是機載設備,所以對整個伺服系統的結構尺寸和重量都做了非常嚴格的要求。加之微波天線波束窄,要保證伺服系統在跟隨瞄準設備的過程中,能正常通信,高的定位精度和隨動精度是必須要滿足的指標。
因此,在整個伺服系統設計過程中,除了良好的結構設計外,要求相應的控制系統既要具有高性能的軟硬件結構,又要有高性能[1]的控制策略和控制算法。本文著重介紹基于DSP的控制系統設計,并提出一種隨動的控制策略,來保證伺服系統高的動態響應能力和靜態穩定性,而且又有較強的抗干擾能力(即魯棒性),使伺服系統達到整個系統的設計要求。
1 控制部分原理
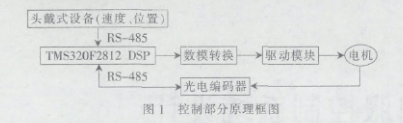
控制系統部分硬件主要由控制模塊和驅動模塊兩大部分組成。控制模塊以TMS320F2812 DSP為運算核心,連同數字/模擬量轉換模塊(ADC)、以及兩個RS-485收發器構成整個控制系統。基本原理框圖如圖1所示。
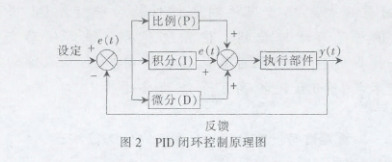
本伺服系統控制采用三閉環控制,即位置環、速度環和電流環[1]。其中,速度環的輸出為電流環的給定信號,位置環的輸出為速度環的給定信號;電流環和速度環是內環,位置環是外環。為了保證電流環的響應頻帶達到1 kHz以上,電流環采用硬件模擬電路實現,在此基礎上進行速度閉環,能夠達到很高的伺服精度,位置環和速度環的控制則在DSP控制器上通過算法實現。PID閉環的原理如圖2所示。
為了降低整機重量和成本,沒有采用專門的測速機來進行速度閉環控制,測速通過一個絕對值的光電編碼器提供的位置信息在DSP內部通過計算所得。絕對值光電編碼器通過RS-485與DSP進行連接,DSP每毫秒給絕對值光電編碼器發送一個握手信號采集絕對值光電編碼器的位置信息數據,在絕對值光電編碼器收到這個握手信號后把測到的位置信息回傳給DSP,DSP獲得這個位置信息后與上一毫秒的位置信息共同計算出一個速度值,進行速度閉環控制,電流環通過DSP把給定值送到D/A進行數字到模擬信號的轉換后送給驅動模塊。
2 退飽和數字PID控制算法
伺服系統是按誤差控制的系統,適合采用PID控制算法,而根據硬件的實現方法有模擬和數字兩種實現方法。本文中電流環用模擬電路實現保證有高的響應帶寬,位置和速度則在DSP內用數字的方法實現。數字PID控制是比例、積分、微分調節的簡稱,是自動化領域性能最強的控制調節方法[2]。數字PID控制方法,具有控制簡單、容易實現、算法靈活多變的特點。
PID的完整公式為:
u(t)=KP×e(t)+KI×e(j)+KD×[e(t)-e(t-1)]+u(0)(1)
其中,KP為比例放大系數;KI為積分放大系數;e(t)為誤差;u(0)為控制量基準值(基礎偏差)。
積分項是一個歷史誤差的累積值,如果只用比例控制時,要么就是達不到設定值,要么就會出現系統振蕩,在使用了積分項后就可以解決達不到設定值的靜態誤差問題,例如一個控制中使用了PI控制后,如果存在靜態誤差,輸出始終達不到設定值,這時積分項的誤差累積值會越來越大,這個累積值乘上KI后會在輸出的比重中越占越多,使輸出u(t)越來越大,最終達到消除靜態誤差的目的。
實際情況中,在電動機的啟動、停轉或大幅度增減設定值時,短時間內系統會輸出很大偏差,使得PID運算的積分積累很大,引起輸出控制量增大和強烈的積分飽和效應,數字PID調節器中的積分飽和會引起大幅度的超調,使系統穩定性下降,所以消除積分飽和的關鍵在于不能使積分項過大,可以采用的方法有積分分離法、遇限消弱積分PID控制算法及變速積分PID算法等[5]。
為消除積分飽和帶來的不利影響,系統采用帶退飽和的積分分離法來防止積分飽和,積分分離的基本思路是:當被調量和設定值偏差較大時,取消積分作用,以免由于積分的作用使系統的穩定性下降,超調量增大,當被控制量接近給定值時,引入積分控制,以便消除靜差,提高控制精度。當積分值積到設定的閾值時,清楚積分累積值,達到退積分的目的,提高系統的靜態穩定性。
積分分離算法可表示為:
u(t)=KP×e(t)+?茁×KI×e(j)+KD×[e(t)-e(t-1)]+u(0)(2)其中β為積分項的開關系數。
β=1,|e(t)|≤ε0,|e(t)|>ε
ε為設定閾值。
3 控制策略及測試結果
本伺服系統通過接收瞄準設備傳過來的位置和速度信息,進行跟隨運動,讓瞄準設備和伺服轉臺始終保持0.3°的隨動誤差,瞄準設備轉動范圍為-120°~+120°。瞄準設備間隔20 ms發一次位置和速度,伺服轉臺收到位置和速度后,必須在20 ms內跟上瞄準設備,并且瞄準設備和天線轉臺始終保持0.3°以內的位置誤差。
為了使伺服轉臺能夠始終跟上瞄準設備,這里采用了一種先位置后速度的跟蹤控制策略,就是在轉臺控制DSP收到瞄準設備傳過來的位置和速度后,先以一個瞄準設備速度的M(M>1)倍的速度走位置,當位置走到隨動精度誤差范圍內(0.3°),再以瞄準設備的速度跟隨瞄準設備。下一個20 ms來到后繼續重復以上的算法步驟。在調試的過程中,主要調試M值,M值過小轉臺跟不上瞄準設備,M值過大則會出現天線轉臺過沖的情況,所以必須取一個合適的M值,以滿足系統指標。圖3是測試軟件的主界面圖。
測試軟件主要完成對整個轉臺的各種指標進行測試和模擬真實觀瞄設備的轉動。
本文結合某項目的實際設計要求,設計了一種機載天線伺服轉臺的控制系統設計,控制系統基于TMS320F2812 DSP為運算核心,采用退積分飽和的PID算法對速度環和位置環進行校正,在實際實驗的過程中,系統具有很好的動態性能和抗干擾性能。文中還著重介紹了一種伺服轉臺的隨動控制策略,這種隨動控制策略在某項目的實際應用中取得了很好的控制效果,文中經過反復的測試,給出了測試結果,這不僅提高了系統的動態性同時又增加了系統的魯棒性。
參考文獻
[1] 吳剛.車輛駕駛機械手的研制與伺服運動控制研究[D].長春:吉林大學,2004.
[2] 孔慧勇.基于運動控制卡的全閉環控制系統研究[D].成都:四川大學,2003.
[3] 王茂飛,程昱.TMS320C2000 DSP控制技術與應用開發[M].北京:清華大學出版社,2007.
[4] 陳幼平,張代林,艾武,等.基于DSP的直線電機位置伺服控制策略研究[J].電機與控制學報,2006,10(1):61-65.
[5] 閆向勇,董志學,馬蓓緋.基于LPC2368的模糊PID溫度控制系統的設計[J].電子測量技術,2009,34(3):129-131.
[6] 黃玉釧,曲道奎,徐方,等.伺服電機的預測控制與比例-積分-微分控制[J].計算機應用,2012,32(10):2944-2947.
[7] 陳鵬.基于DSP的運動控制器開發及其運動控制算法研究[D].長春:吉林大學,2007.
編輯:jq
-
dsp
+關注
關注
561文章
8244瀏覽量
366621 -
PID
+關注
關注
38文章
1499瀏覽量
91173 -
伺服電機
+關注
關注
88文章
2184瀏覽量
61274
發布評論請先 登錄
PLC怎么控制多臺交流伺服電機達到同步工作

航空級電機控制系統的抗輻照MCU功能安全設計與電磁兼容驗證方法
伺服基礎知識詳解

伺服電機增益詳解
基于DSP與FPGA異構架構的高性能伺服控制系統設計

伺服電機的控制方式簡述

伺服精準控制優選!電子谷伺服連接線適配多品牌穩定傳輸

智能變槳:基于DSP與CPLD協同處理的高動態飛行器主槳電動變槳距伺服控制系統

伺服電機控制系統的高寬帶電流環參數設計

MT6825磁編芯片為伺服電機控制系統帶來全角度測量能力
MT6825磁編芯片:為伺服電機控制系統注入全角度測量新活力
STM32在三相無刷直流電機控制系統中的應用
STM32項目分享:室內無線控制系統




 工商網監
工商網監
評論