 三軸注塑機械手系統組成及說明
三軸注塑機械手系統組成及說明

1、系統組成及說明
CRT-DMC630MF系統主要由運動控制器(DMC630M)和手持盒(Leader30ST)兩個部分組成。
DMC630M控制器為系統核心,可以存儲512組不同產品加工數據。
Leader30ST手持盒,為手持控制端,通過標準Modbus協議與DMC630M控制器進行實時通訊;手持盒采用工藝文件與坐標信息采集分離式設計,使示教編程更加方便快捷;工藝文件除實現電機基本運動控制(多軸直線插補、圓弧插補、圓弧與插補聯動)外,更可進行復雜的邏輯及運算功能。其硬件結構基于高性能DSP 為控制核心、FPGA 協處理,插補算法、脈沖信號產生及加減速控制、I/O 信號的檢測處理,均由硬件和固件實現,確保了運動控制高速、高精度及系統穩定。
DMC630M控制器支持三軸步進電機、伺服電機控制,以步進電機為例,三軸系統的構成
控制器、手持盒和驅動器共同組成了三軸系統的控制部分,手持盒與控制器之間通過標準Modbus協議進行通訊,控制器通過自身的脈沖輸出口給驅動器發送脈沖信號,從而控制三軸系統中的步進電機,再結合其它的輸入輸出信號,就可以實現復雜的運動控制。
2、取放料例程
例程要求:如圖2所示:圖中立方體為障礙物,加工點不能與之觸碰,P1 點為取料點,P2 點位放料點,首先移動到 P1 點,取料(OT1 為 1),延時 1000ms,檢測是否取到料(IN16), 若沒有取到料(IN16 有效)發出報警信號(OT3),直到解除報警(IN17 有效),取到料后抬高到安全位(P3),移動到 P4,再移動到放料點 P2,放料(OT1 為 0),移動到 P4,移動到 P3,檢測是否還要取料(IN18),如果 IN18 有效,移動到 P1 重復之前動作,如果 IN18 無效,回原點 P5。具體的任務流程參考規格說明書。
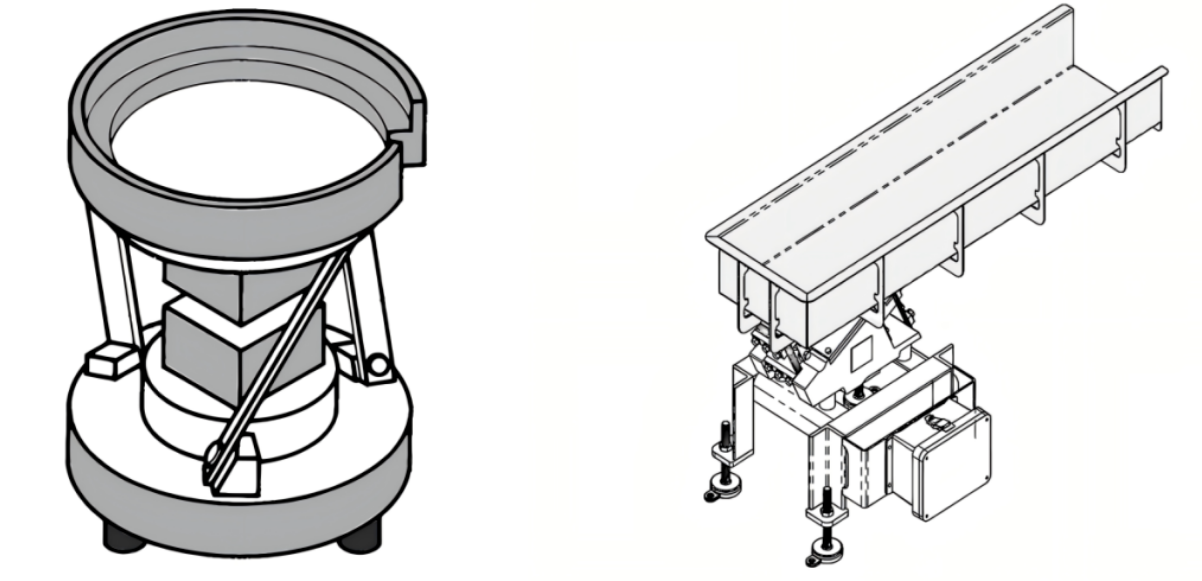
3、機械手上下料的運動軌跡
AAA客戶的生產線上需要使用機械手上下料,結構如圖3所示。X軸執行水平左右運動,Y軸執行豎直上下運動,手爪由氣缸控制執行抓取動作。它們的任務是將右側工裝上的工件依次抓取至左側傳送帶上。X軸原點距離傳送帶上工件放置點為W,工裝上第一個工件距離傳送帶上工件放置點為S,工裝上每個工件之間的距離均為L。
通常大多數用戶會將X、Y的運動軌跡確定為矩形,即Y軸上下運動完成后X軸再水平運動,然后Y軸再次上下運動,如此反復進行。但這樣的方式會導致比較強烈的抖動,并且造成一定的時間浪費。因此,我們CRT可采用圖4所示的運動軌跡,在2個拐彎處,X、Y軸進行一段半徑為R的圓弧插補運動,這樣可大大減弱抖動,且能節省時間。A點為起始點,抓取并放置第1個工件的路徑為A→B→C→D→E→F→G→H→I→J→K,抓取并放置第2個工件的路徑與第一個相同,只不過A→B和F→G的距離增加了長度L,第3個、第4個、第5個亦然。
DMC630M支持連續插補運動,在連續插補模式下,速度是連續的,各插補段之間沒有加減速過程,從而使得運動更加平滑。
責任編輯:haq
-
驅動器
+關注
關注
54文章
9083瀏覽量
155545 -
控制器
+關注
關注
114文章
17791瀏覽量
193224
發布評論請先 登錄
適配FOUP載具的晶圓搬運機械手,哪些型號維護更便捷?
注塑機數據采集網關實現海天注塑機和MES系統之間的雙相通訊

注塑機數據采集網關實現海天注塑機與MES系統雙向數據互通的核心橋梁

注塑機溫控系統如何選UPS電源?優比施專家教你避坑指南
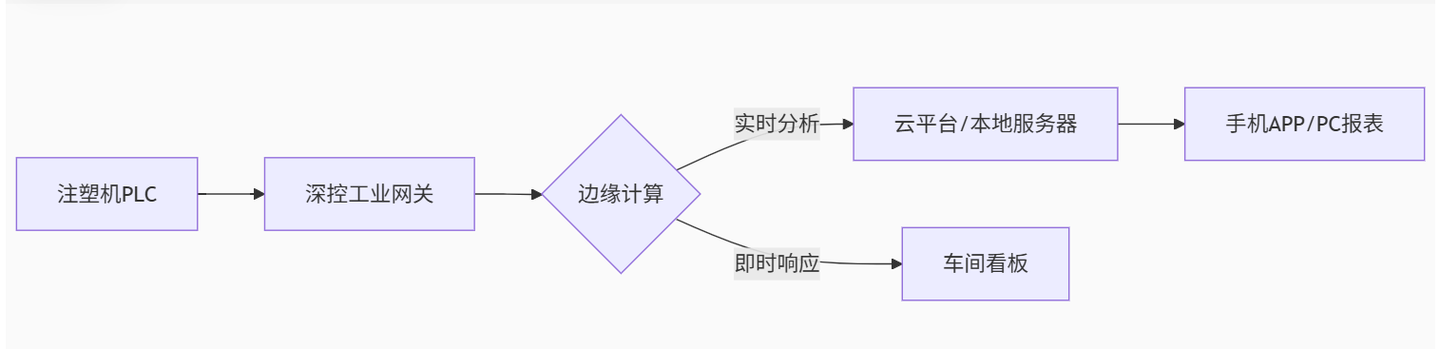
數字化工廠-注塑機數據采集、邊緣計算

小體積、大電流:凌科DL28連接器替代IEC60309插頭成注塑機更優選擇

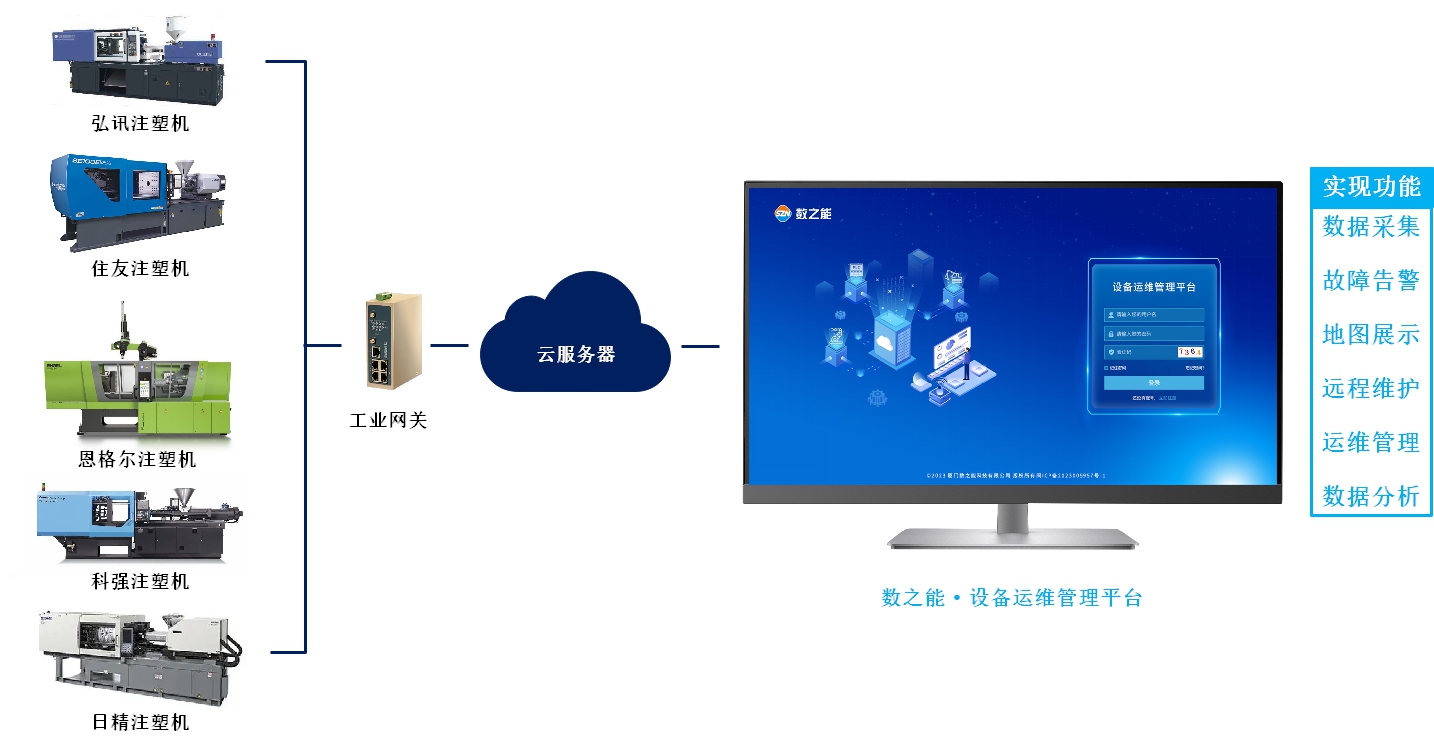
注塑機數據采集方案

工業數據中臺可以接入哪些注塑機對接到MES系統中

日精注塑機通過IOT中臺對接到MES系統


工業智能網關實現科強注塑機數據采集遠程監控

注塑機數據采集網關和數據中臺有哪些聯系特點
profinet轉ethercat網關的自動上料機械手集成案例




 工商網監
工商網監
評論