 FANUC機器人TCP三點法
FANUC機器人TCP三點法

三點法設置方法
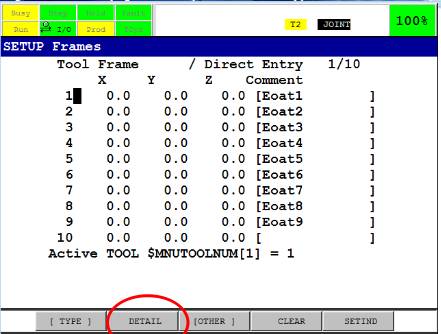
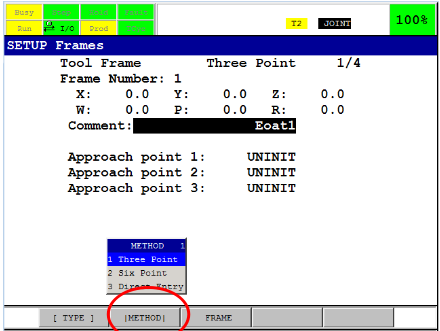
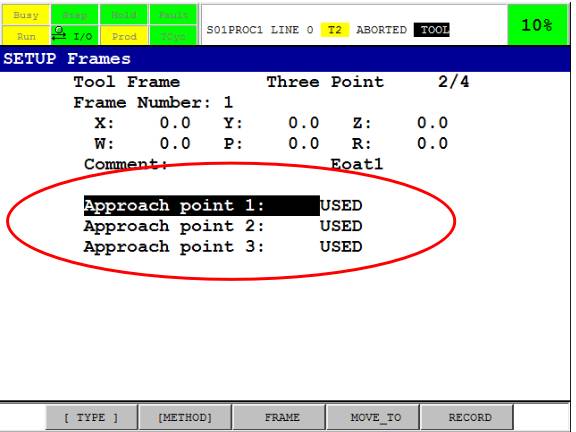
DETAIL–METHOD–回車進入三點法界面:
三點法操作步驟:
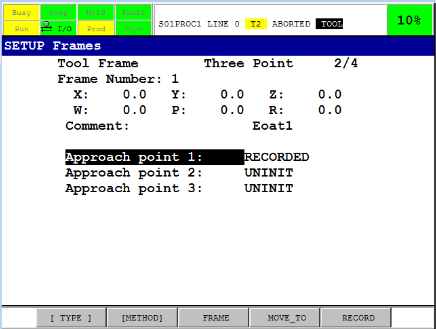
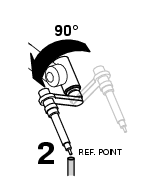
記錄接近點1
a.移動光標到接近點1(Approachpoint1);
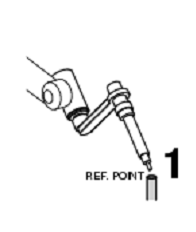
b.把示教坐標切換成全局坐標(WORLD)后移動機器人,使工具尖端接觸到基準點;
c.按【SHIFT】+F5【RECORD】(位置記錄)記錄
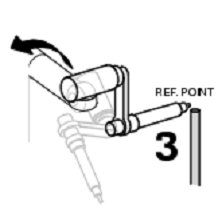
記錄接近點2
a.移動光標到接近點2(Approachpoint2);
b.把示教坐標切換成關節坐標(JOINT),旋轉J6軸(法蘭面)至少90度,不要超過360度;
c.把示教坐標切換成全局坐標(WORLD)后移動機器人,使工具尖端接觸到基準點;
d.按【SHIFT】+F5【RECORD】(位置記錄)記錄;
記錄接近點3
a.移動光標到接近點3(Approachpoint3);
b.把示教坐標切換成關節坐標(JOINT),旋轉J4軸和J5軸,不要超過90度;
c.把示教坐標切換成全局坐標(WORLD)后移動機器人,工具尖端接觸到基準點;
d.按【SHIFT】+F5【RECORD】(位置記錄)記錄;
當三個點記錄完成,新的工具坐標系被自動計算生成.Point1-3顯示成USED,如下圖所示:
責任編輯:xj
原文標題:FANUC機器人TCP三點法詳解,你用過嗎?
文章出處:【微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31078瀏覽量
222206 -
TCP
+關注
關注
8文章
1424瀏覽量
83503 -
Fanuc
+關注
關注
19文章
121瀏覽量
38804
原文標題:FANUC機器人TCP三點法詳解,你用過嗎?
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
、芯片封裝、功率模塊的關鍵支撐;而低溫燒結銀正從實驗室走向機器人、新能源、第三代半導體等產業核心,成為高端電子互連的 隱形推手。
一、春晚四家機器人:幕后推手與技術硬核
1 四家機器人
發表于 02-17 14:07
探索RISC-V在機器人領域的潛力
利用Gazebo仿真環境(在x86主機上運行)和MUSE Pi Pro上的ROS 2節點進行了聯合仿真。
? 場景: 在PC的Gazebo中運行一個TurtleBot3機器人模型,MUSE Pi
發表于 12-03 14:40
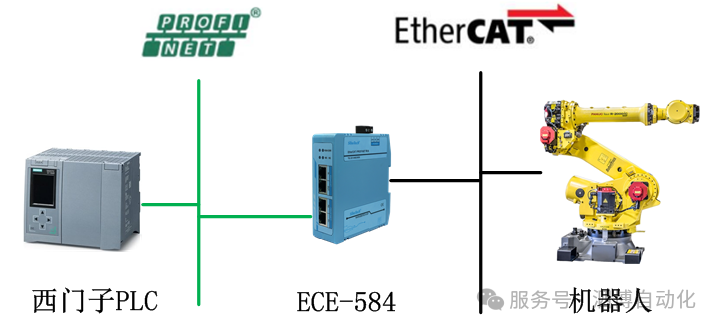
如何實現FANUC/埃斯頓/匯川機器人與西門子PLC實時數據互傳?
在智能產線中,跨協議設備的高效協同是一大難點。當產線中既有西門子PROFINET系統,又配有EtherCAT機器人(如FANUC、埃斯頓、匯川)時,協議壁壘使數據互通變得復雜。通常,機器人
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
,以其"三屏異顯"和"八路攝像頭"的強悍能力,為機器人開發者提供了前所未有的強大算力平臺。米爾電子基于其MYD-LR3576
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
。
同時,磁傳感器還是多傳感器融合中的 “穩定錨點”。在機器人運動系統的融合定位中,它常作為核心基準。以 “足球機器人” 項目為例,當視覺傳感器因強光出現噪點、超聲波傳感器受聲波反
發表于 08-26 10:02
工業機器人的特點
者的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
發表于 07-26 11:22
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例
本案例是ModbusTCP主站通過開疆智能ModbusTCP轉Devicenet網關連接發那科機器人的配置案例,操作分為三個配置1:ModbusTCP主站配置2:ModbusTCP轉Devicenet網關配置3:FANUC

開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例
本案例是通過開疆智能Profinet轉ModbusTCP網關將西門子PLC與ABB機器人進行通訊 因西門子PLC采用Profinet協議,而ABB機器人采用的是ModbusTCP通訊。故采取此種方案

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
:機器人還會將自身傳感器獲取的環境信息與預先建立的機場高精度地圖進行匹配。通過對比地圖中的特征點和實際感知到的環境特征,進一步精確機器人在地圖中的位置。同時,利用這種地圖匹配方式,可以對定位結果進行實時
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
《ROS 2智能機器人開發實踐》內容閱讀初體驗
《ROS 2 智能機器人開發實踐》是一本針對 ROS 2(Robot Operating System 2)這一先進機器人開發框架的實用指南。隨著
發表于 04-27 11:24
EtherCAT轉Modbus TCP:機器人產業的“語言”之困
通、跑得快”** 工業機器人產線升級 ** **在汽車焊接、3C電子裝配等場景中,快速集成支持MODBUS TCP的視覺檢測系統、溫度控制器與EtherCAT驅動的六軸機械臂,實現全流程數據閉環,生產效率提升20%。 協作機器人

發那科機器人A型控制柜急停板安全回路接線方法
發那科機器人A型控制柜的安全回路接口涵蓋了外部急停輸入、安全門開關、機器人急停輸出以及伺服切斷等多個功能,這些接口均通過硬接線進行連接。在操作FANUC機器人時,必須啟用急停板安全回路



 工商網監
工商網監
評論