 RV減速器和諧波減速器兩者的優劣勢
RV減速器和諧波減速器兩者的優劣勢

作為工業機器人核心零部件的精密減速器,與通用減速器相比,機器人用減速器要求具有傳動鏈短、體積小、功率大、質量輕和易于控制等特點。 大量應用在關節型機器人上的減速器主要有兩類:
RV減速器和諧波減速器 1RV減速器和諧波減速器的原理和優劣勢RV減速器:用于轉矩大的機器人腿部腰部和肘部三個關節,負載大的工業機器人,一二三軸都是用RV。相比諧波減速機,RV減速機的關鍵在于加工工藝和裝配工藝。RV減速機具有更高的疲勞強度、剛度和壽命,不像諧波傳動那樣隨著使用時間增長,運動精度會顯著降低,其缺點是重量重,外形尺寸較大。
▲RV-E型減速器 諧波減速器:用于負載小的工業機器人或大型機器人末端幾個軸,諧波減速器是諧波傳動裝置的一種,諧波傳動裝置包括諧波加速器和諧波減速器。諧波減速器主要包括:剛輪、柔輪、軸承和波發生器三者,四者缺一不可。其中,剛輪的齒數略大于柔輪的齒數。諧波減速機用于小型機器人特點是體積小、重量輕、承載能力大、運動精度高,單級傳動比大。
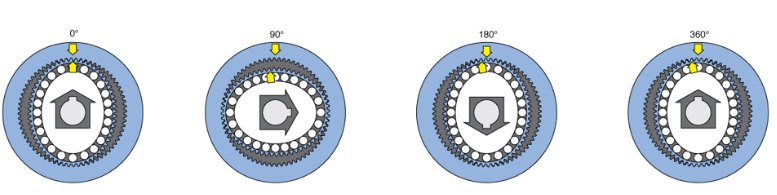
▲諧波減速器 兩者都是少齒差嚙合,不同的是諧波里的一種關鍵齒輪是柔性的,它需要反復的高速變形,所以它比較脆弱,承載力和壽命都有限。RV通常是用擺線針輪,諧波以前都是用漸開線齒形,現在有部分廠家使用了雙圓弧齒形,這種齒形比漸開線先進很多。 減速器的兩巨頭是Nabtesco和Hamonica Drive,他們幾乎壟斷了全球的機器人用減速器。這兩種減速器都是微米級的加工精度,光這一條在量產階段可靠性高就很難了,更別說幾千轉的高速運轉,而且還要高壽命。 諧波減速器由“柔輪、波發生器、剛輪、軸承”這四個基本部件構成。 柔輪的外徑略小于剛輪的內徑,通常柔輪比剛輪少2個齒。波發生器的橢圓型形狀決定了柔輪和剛輪的齒接觸點分布在介于橢圓中心的兩個對立面。波發生器轉動的過程中,柔輪和剛輪齒接觸部分開始嚙合。波發生器每正時針旋轉180°,柔輪就相當于剛輪逆時針旋轉1個齒數差。在180°對稱的兩處,全部齒數的30%以上同時嚙合,這也造就了其高轉矩傳送。 相比諧波減速器,RV傳動是新興起的一種傳動,它是在傳統針擺行星傳動的基礎上發展出來的,不僅克服了一般針擺傳動的缺點,還具有體積小、重量輕、傳動比范圍大、壽命長、精度保持穩定、效率高、傳動平穩等一系列優點。
RV減速器是由擺線針輪和行星支架組成,以其體積小、抗沖擊力強、扭矩大、定位精度高、振動小、減速比大等諸多優點被廣泛應用于工業機器人、機床、醫療檢測設備、衛星接收系統等領域。 RV減速器的殼體和擺線針輪是通過實體的鋼來發生傳動的,因此承載能力強。而諧波減速器的柔輪可不斷發生變形來傳遞扭矩,這一點決定了諧波減速器承受大扭矩和沖擊載荷的能力有限,因此一般運用在前端。 2RV減速器和諧波減速器兩者的優劣勢
諧波減速器結構簡單緊湊,適合于小型化、低、中載荷的應用。
RV減速器剛性好、抗沖擊能力強、傳動平穩、精度高,適合中、重載荷的應用,但RV減速器需要傳遞很大的扭矩,承受很大的過載沖擊,保證預期的工作壽命,因而在設計上使用了相對復雜的過定位結構,制造工藝和成本控制難度較大。RV減速器內部沒有彈性形變的受力元件,所以能夠承受一定扭矩。RV減速器的軸承是其薄弱環節,受力時很容易突破軸承受力極限而導致軸承異常磨損或破裂。在高速運轉時這個問題更突出,所以RV減速機的額定扭矩隨輸入轉速下降非常明顯。
3減速器之間是否存在取代關系
正方觀點:RV減速器較機器人中常用的諧波傳動具有高得多的疲勞強度、剛度和壽命,而且回差精度穩定,不像諧波傳動那樣隨著使用時間增長運動精度就會顯著降低。所以許多國家的高精度機器人傳動多采用RV減速器,因此,RV減速器在先進機器人傳動中有逐漸取代諧波減速器的發展趨勢。 這些產品在某些型號上確實存在替代關系,但這幾類減速器只能實現部分替代。絕大部分情況下,各類減速器很難實現替換,比如在速比方面,諧波和RV的速比都要遠遠大于行星,所以小速比領域是行星的天下。當然行星的速比是可以做大的,但是很難去替換諧波和RV。又比如剛性方面,行星和RV的剛性要好于諧波,在體現剛性的使用工況下,諧波很難有好的表現。 諧波減速器的特點是輕和小,在這方面,行星和RV卻很難做到。所以各類減速器只能在一部分情況下可實現替換,但是如果一種產品全方位替換另一種產品是不現實的。 反方觀點:各類減速器之間不能相互取代,而是一種互補的關系。 RV和諧波這兩種傳動有互補性,但也不排除結構設計優化和制造工藝突破后,在中低載荷應用領域形成局部競爭。
責任編輯:lq
-
機器人
+關注
關注
213文章
31078瀏覽量
222205 -
減速器
+關注
關注
7文章
429瀏覽量
24485 -
諧波減速器
+關注
關注
1文章
78瀏覽量
5395
原文標題:工業機器人的RV減速器和諧波減速器有什么區別
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
伺服電機經減速器之后的精度問題
減速機與變頻器區別,在哪種情況下可以互換?

在MCU方面,能不能給出芯源的MCU與主流的MCU之前的對比,包括優劣勢、替換狀態等?
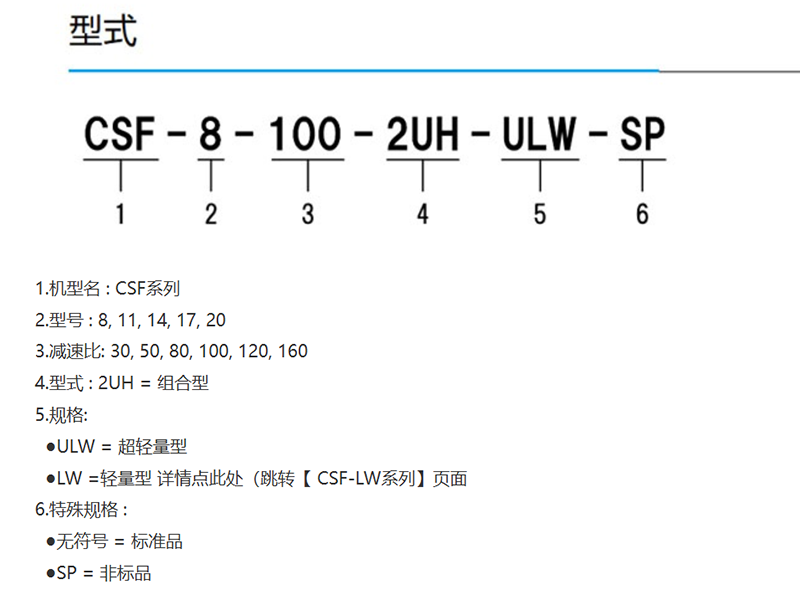
革新機器人設計:哈默納科CSF-ULW系列諧波減速機解析
有源濾波器和諧波保護器的區別?

Microchip發布新一代無磁關節感知與控制一站式方案

GaN(氮化鎵)與硅基功放芯片的優劣勢解析及常見型號
DC/DC 與 AC/DC:技術原理、應用場景及優劣勢全解析
減速機、滾珠絲杠、同步帶,哪個誤差較大?
成都匯陽投資關于人形機器人打開增量空間,減速器國產替代進行時
哈默納科Harmonic精密減速器 工業機器人關節運動的核心部件
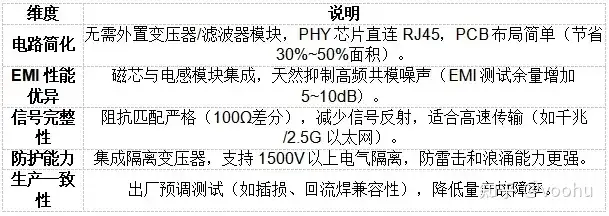
集成式網絡變壓器優劣勢
人形機器人關節核心零部件,諧波減速器的技術挑戰和創新發展趨勢
APEX經濟型減速器——助力TETA電子束焊機高性價比焊接



 工商網監
工商網監
評論