") 研究人員開發(fā)了一種新型的磁力驅(qū)動高速軟件機器人
研究人員開發(fā)了一種新型的磁力驅(qū)動高速軟件機器人

《通訊-材料》最近發(fā)表了一篇關于技術研究和開發(fā)的論文,研究人員成功地開發(fā)了一種新型的磁力驅(qū)動高速軟件機器人,它可以行走、游泳、漂浮和捕捉活蠅。
機器人形狀像紙,可以像蟬翼一樣薄。這種材料嵌入在一個小磁鐵中,不需要電驅(qū)動,可以根據(jù)磁場的變化改變形狀和動作。
在機器人中嵌入微型磁鐵,它能快速響應磁場,達到迄今為止最高的比能量密度,這是在低磁場下高速驅(qū)動的關鍵。
在實驗實例中,重23 mg、厚200 um的四臂機器人在3.7mt磁場作用下漂浮;在17 mm×19 mm、80μm厚的水中傳播物體;六臂機器人可捕獲、搬運和釋放直徑為20 mm、厚度為80μm的非磁性物體。
一只花機器人在觸發(fā)陷阱后抓住了一只蒼蠅,然后打開了由磁力驅(qū)動的八只手臂來釋放它,直徑為25毫米,厚度為200微米。
責任編輯:YYX
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
磁場
+關注
關注
3文章
907瀏覽量
25361 -
機器人
+關注
關注
213文章
31073瀏覽量
222162
原文標題:科學家研發(fā)出軟體機器人:薄如蟬翼 會行走 懸浮
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
熱點推薦
探索RISC-V在機器人領域的潛力
運行ROS 2,充分證明了RISC-V架構完全有能力承載機器人操作系統(tǒng)這樣的復雜軟件棧。它不僅是學習RISC-V的絕佳工具,更是探索未來邊緣計算和智能機器人的一個強大起點。
致謝:
發(fā)表于 12-03 14:40
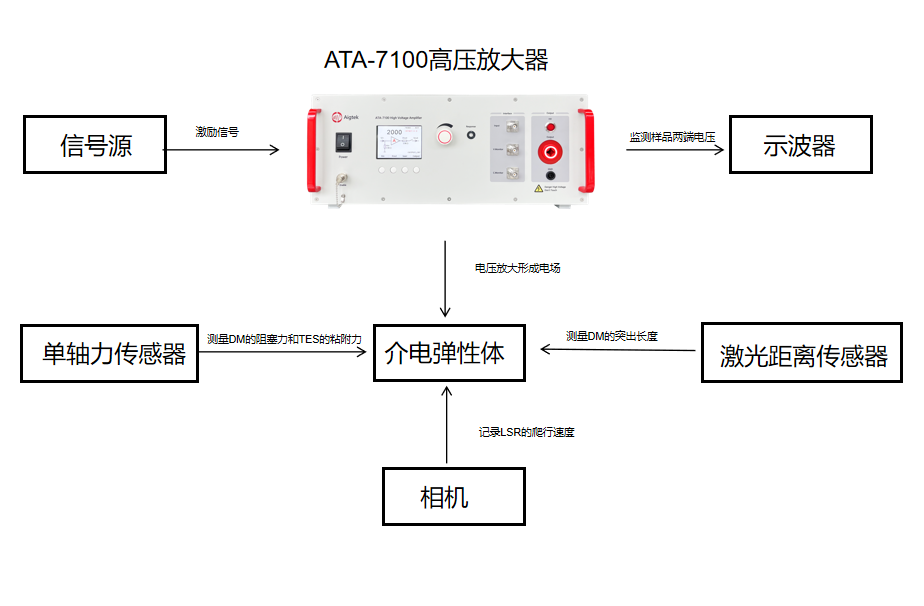
高壓放大器在介電彈性體制成的軟機器人研究中的應用
進行兩棲運動、攀爬和負重爬行。開發(fā)了一種高性能的摩擦電仿生機器人系統(tǒng),用于驅(qū)動和控制電響應軟體機器人。爬行
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
更多"、"互動更流暢"是開發(fā)者面臨的核心挑戰(zhàn)。傳統(tǒng)的單一屏幕和有限的視覺輸入已成為提升機器人智能化水平的瓶頸。而瑞芯微RK3576高性能處理器的出現(xiàn)
發(fā)表于 10-29 16:41
如何在NVIDIA Isaac Lab中使用Newton訓練四足機器人
物理在機器人仿真中發(fā)揮著至關重要的作用,它為機器人在真實環(huán)境中的行為及交互提供了精準的虛擬呈現(xiàn)基礎。借助仿真器,研究人員和工程師能夠以安全、高效且經(jīng)濟的方式訓練、開發(fā)、測試和驗證

如何基于翼輝信息SylixOS開發(fā)ROS 2應用
算法的一站式解決方案,同時輔以功能強大的開發(fā)工具,助力工程師與研究人員高效完成項目開發(fā)。ROS 2 在實時性、安全性、靈活性和跨平臺支持等方面進行了顯著的改進,為現(xiàn)代

介電彈性體軟機器人研究:高壓放大器的應用實踐
進行兩棲運動、攀爬和負重爬行。開發(fā)了一種高性能的摩擦電仿生機器人系統(tǒng),用于驅(qū)動和控制電響應軟體機器人。爬行

工業(yè)機器人的特點
機器人是關鍵。工業(yè)互聯(lián)網(wǎng)是通過端上的數(shù)據(jù)傳輸,經(jīng)過大數(shù)據(jù)分析和云計算處理,再進行智能化決策的一整個過程,其中端的數(shù)據(jù)傳輸是基礎。工業(yè)互聯(lián)網(wǎng)的端包括機器人、傳感器等一切線下連接端口。因此
發(fā)表于 07-26 11:22
高壓放大器在軟體機器人研究中的應用
一、引言 軟體機器人因其高度的柔韌性和適應性,在醫(yī)療、救援、工業(yè)等領域展現(xiàn)出巨大潛力。與傳統(tǒng)剛性機器人相比,軟體機器人能夠更好地適應復雜環(huán)境和執(zhí)行精細任務。高壓放大器在軟體

微雙重驅(qū)動的新型直線電機研究
摘罷:大行程、高精度,同時易于小型化的移動機構是先進制造業(yè)等領域要解決的關鍵問題之一,綜述了現(xiàn)有宏/微雙重驅(qū)動機構和直線超聲電機的研究進展和存在問題,提出了一種宏微雙重
發(fā)表于 06-24 14:17
輪式移動機器人電機驅(qū)動系統(tǒng)的研究與開發(fā)
系統(tǒng),開發(fā)了一套二輪差速驅(qū)動轉(zhuǎn)向移動機器人電機驅(qū)動系統(tǒng),完成了系統(tǒng)各部件的整體裝配和調(diào)試。試驗結(jié)果表明,該設計方案可行、系統(tǒng)運行穩(wěn)定可靠、成
發(fā)表于 06-11 14:30
明遠智睿SSD2351開發(fā)板:語音機器人領域的變革力量
源的開發(fā)資料為開發(fā)者提供了深入研究和定制語音機器人功能的基礎,開發(fā)者可以根據(jù)不同的應用需求,對語音識別算法、語音合成引擎等進行優(yōu)化和改進。
發(fā)表于 05-28 11:36
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人
發(fā)表于 05-13 15:02
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學者入門的引路書
還能了解很多技術和框架,破除初學者的自負困境,讓初學者知道功能是由很多開發(fā)者維護的,前人已經(jīng)為各種產(chǎn)品搭建了完善的框架。避免陷入得一個人單打獨斗的錯
發(fā)表于 04-30 01:05
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
、軟件開發(fā)、系統(tǒng)集成等環(huán)節(jié),讓讀者能夠全面了解一個完整的機器人應用開發(fā)過程。
實踐項目:除了案例分析,書中還設計了一些實踐項目,供讀者進行動
發(fā)表于 04-27 11:24
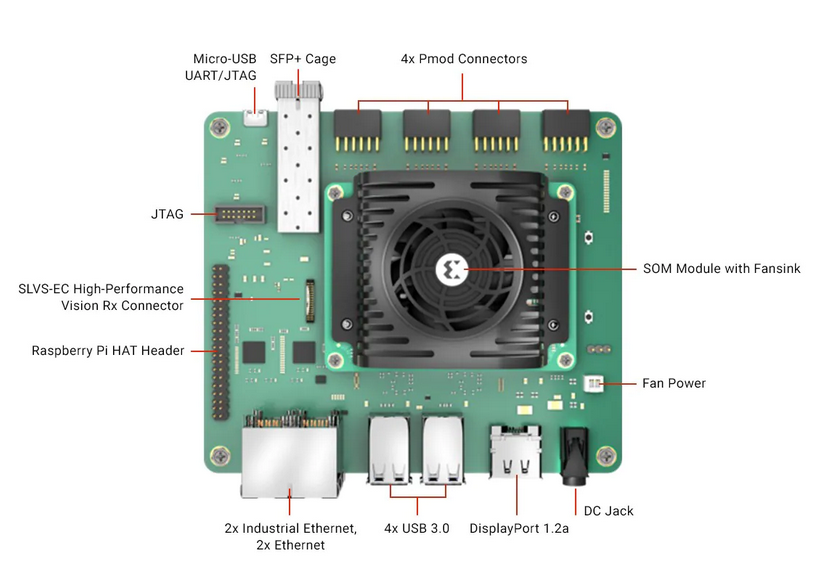
機器人開發(fā)套件 Kria KR260
AMD/XilinxKria KR260機器人入門套件是一款基于Kria K26 SOM的開發(fā)平臺,設計用于機器人和工業(yè)應用。它具有高性能接口和原生ROS2支持,便于



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論