 KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解

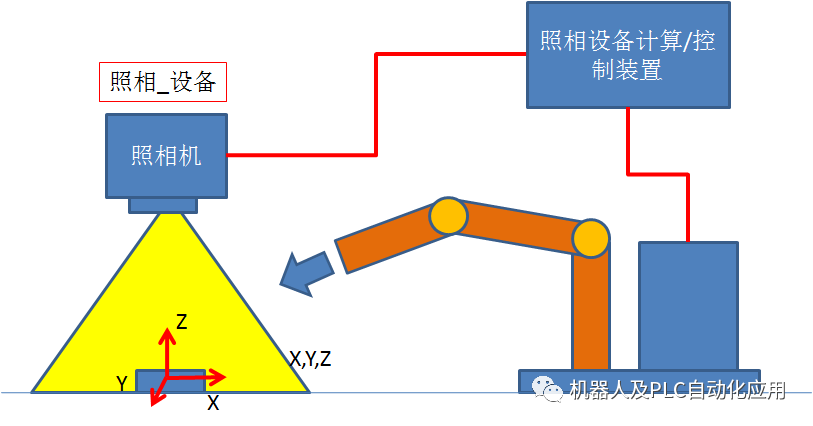
視覺抓取主要是通過改變機器人的TOOL坐標系或BASE坐標系來實現的.
物體位置的變化主要是它位置的X,Y,Z 方向的變化.
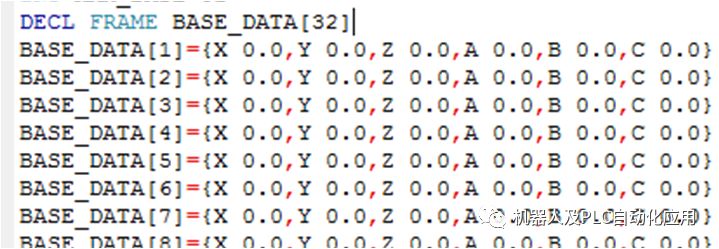
BASE坐標系:可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
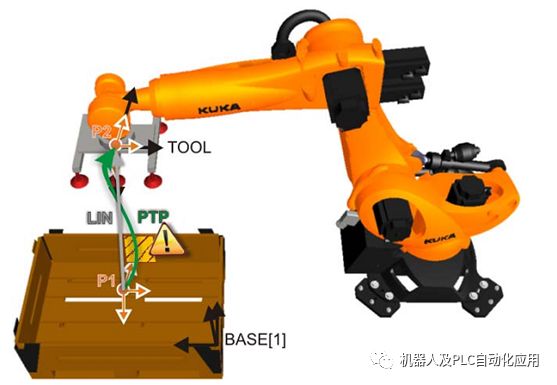
以改變BASE 坐標系為例:
KUKAC4 現在可以使用32個BASE 坐標系
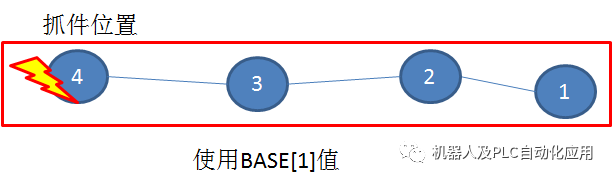
沒有使用視覺補償功能時,只用一個BASE坐標系.
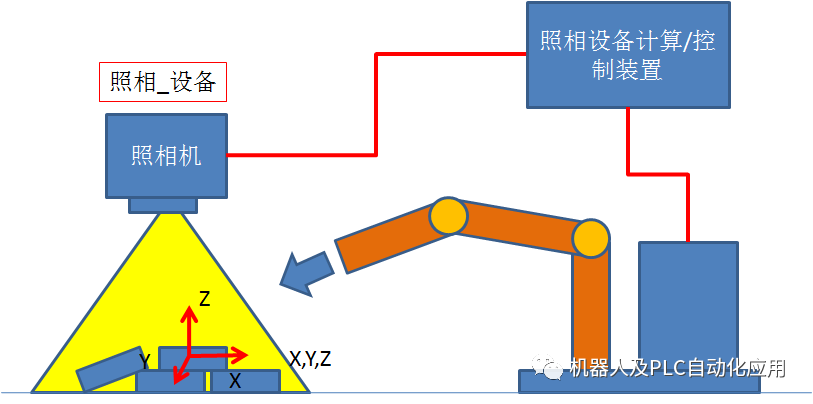
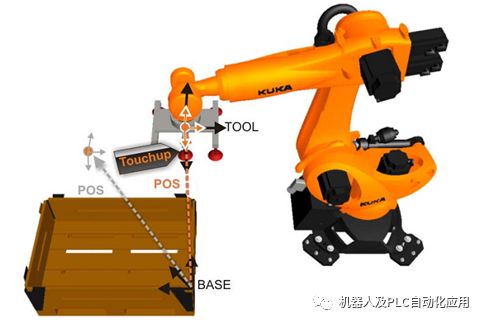
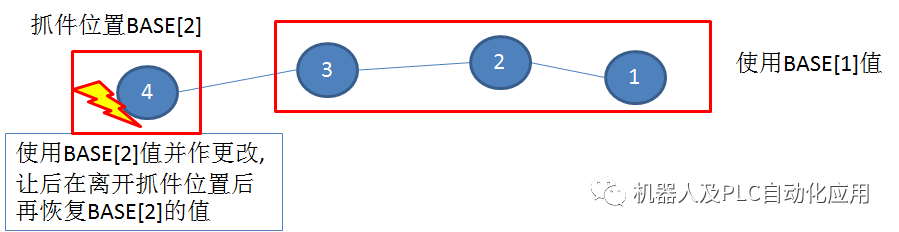
改變機器人BASE坐標系值從而改變機器人抓件位置,使用多個坐標系.
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222258 -
視覺
+關注
關注
1文章
179瀏覽量
24808 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
10071
原文標題:KUKA 機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數據?
EtherCAT總線在機器人控制總線里占據重要地位。這次,我們搭建了包含EtherCAT主從站和分析儀的完整環境,用機器人分析儀EtherCAT-Analyzer實際抓取主從站之間的通

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
處理器,支持 1.8 GHz 主頻,并集成2Tops NPU、G2D、VPU 4K高清視頻編解碼器,為復雜控制算法與視覺融合計算提供充足算力。米爾MYD-LT536開發板
在“高精度機器人控
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
瑞芯微RK3576 AIoT處理器處理器憑借其卓越的多屏異顯與8路攝像頭接入能力,為機器人領域帶來革新。米爾電子MYD-LR3576開發板實測數據顯示,在高負載下CPU占用僅34%,完美實現多路視覺
發表于 10-29 16:41
開疆智能Profinet轉EtherNET/IP網關連接機器人配置案例
本案例是通過網關將EtherNET通訊協議的機器人接入到西門子Profinet網絡之中,以便于PLC可以對機器人可以進行讀寫控制。 配置過程: 設置
機器人關節模組:類型、設計、工作原理及應用
機器人關節模組是一種用于驅動機器人關節轉動、輪子旋轉或控制夾爪運動的裝置。根據負載需求,機器人關節模組有多種類型。負載通常涉及扭矩、精度、操作速度、功耗等因素。

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
2025 世界人形機器人運動會于 8 月 17 日圓滿收官,賽場上機器人在跑步、跳躍、抓取等項目中的精彩表現,背后是運動控制、環境感知等技術的迭代升級。而在這些技術中,磁傳感器芯片憑借
發表于 08-26 10:02
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信
在工業自動化場景中,不同品牌的設備往往采用不同的通信協議,例如西門子PLC通常使用 PROFINET ,而川崎機器人則可能采用 Ethernet/IP 。要讓它們實現數據交互,通常需要借助

詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
、Gazebo仿真(含RGBD相機/激光雷達仿真)、實物機器人運動控制,實現\"仿真→實物\"的無縫銜接
高階應用篇(7-9章)
聚焦視覺SLAM、自主導航等前沿場景,提供完整項目鏈路(如
發表于 04-27 11:24
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
發表于 04-25 17:59
復合機器人抓取精度的影響因素及提升策略
復合機器人結合了移動機器人(如AGV)和機械臂的功能,廣泛應用于物流、制造等領域。抓取精度是其核心性能指標之一,直接影響作業效率和產品質量。本文將探討復合機器人
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動



 工商網監
工商網監
評論