本文設(shè)計并實現(xiàn)了基于機器視覺的機械手裝配系統(tǒng),可在線完成對不同型號和任意擺放工件的裝配任務(wù)。系統(tǒng)主要由機器視覺系統(tǒng)和機械手裝配系統(tǒng)組成。
2020-06-23 10:21:00 4364
4364 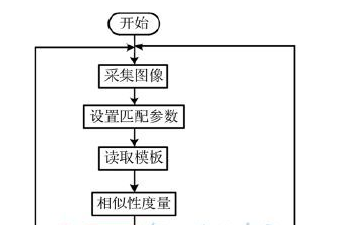
一、系統(tǒng)控制要求 簡易機械手的結(jié)構(gòu)如圖5-9所示。M1為控制機械手左右移動的電動機,M2為控制機械手上下升降的電動機,YV線圈用來控制機械手夾緊、放松,SQ1為左到位檢測開關(guān),SQ2為右到位檢測開關(guān)
2022-12-05 13:47:0049708 為了展示“基于FPGA的AI,機器視覺,運動控制”,Enclustra打造了機械手和人互動玩石頭剪刀布的demo。
2021-05-17 17:03:342609 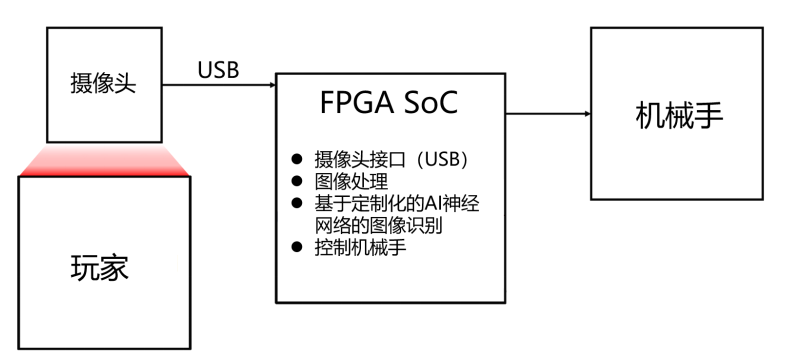
汽車焊接的特殊要求。
智能型機械手 :智能型機械手具有較高的智能化水平,可以通過傳感器、視覺系統(tǒng)等技術(shù)實現(xiàn)自主感知、決策和控制。它能夠適應(yīng)復(fù)雜的工作環(huán)境和任務(wù)要求,具有較高的可靠性和安全性。
2024-09-18 10:31:15
機械手plc
2012-05-28 16:07:10
在設(shè)計機械手工作安全區(qū)時,安全區(qū)呈矩形。當兩個安全區(qū)相鄰時,其實它們覆蓋的區(qū)域都是安全區(qū),而機械手在實際工作時,不能從它們中間直接走,必須從上面繞一下才行,怎么解決呢?
2019-02-28 15:53:25
注塑機機械手的驅(qū)動系統(tǒng)一般可分為液壓驅(qū)動,氣壓驅(qū)動和電力驅(qū)動等三類,也可以根據(jù)工作要求采用上述三種類型的組合系統(tǒng)來完成驅(qū)動。在設(shè)計選用驅(qū)動系統(tǒng)時應(yīng)注意以下幾點: (1) 根據(jù)機械手的負載量來確定
2012-09-10 09:51:04
用Labview怎么控制機械手動作,有沒有這方面學(xué)習(xí)的視頻或資料
2018-04-18 15:33:20
大家好,我是一個labview的新人,最近我要做一個畢業(yè)設(shè)計,需要用USB攝像頭采集數(shù)據(jù),在用labview做一個上位機控制六軸臂機械手,請問我要怎么實現(xiàn)?
2016-04-15 14:10:47
我又帶著問題來了 LabVIEW和機械手通信設(shè)備總是要有個暫停和繼續(xù)運行的按鈕我界面做了個暫停按鈕,可是這個暫停按鈕只暫停機械手的程序,并不暫停labview的程序。暫停的時候我labview
2021-06-21 10:40:49
控制技術(shù),使桁架機械手的作業(yè)效率變得更高、使用范圍變得更廣、工藝也更加穩(wěn)定和方便。5、桁架機械手具有使用靈活、功能多樣的特點,操作工具不同,桁架機械手所體現(xiàn)出來的的功能也是不同的。6、桁架機械手具有
2020-11-25 15:24:58
本人是研究機械手控制算法的,現(xiàn)在做了一個由步進電機驅(qū)動機械手關(guān)節(jié)的機械手,現(xiàn)在理論算法寫好了,就是不知道如何進行實驗實驗,我的疑問如下: 因為控制算法中的控制器如:T=Mq**+Cq*+g,都是表示
2016-11-21 16:21:59
如題,畢業(yè)設(shè)計讓做直角坐標機械手,還腰做實物 ,可是我對著壓根沒什么了解,只是知道是干什么用的,一點思路沒有啊,還有不到兩個月怎么辦TT
2016-04-01 18:53:23
如何對機械手進行組裝并且調(diào)試呢?
2022-01-20 07:05:01
研究目標設(shè)計一款基于STM32的仿生機械手:(1)基于STM32的仿生機械手實現(xiàn)無線控制和有線控制。 (2)實現(xiàn)串口指令控制仿生機械手動作。(3)實現(xiàn)仿生機械手具有多種工作模式。(4)實現(xiàn)數(shù)據(jù)手套
2022-01-07 06:55:18
`日本JEL晶圓搬運機械手,中國代理,歡迎來電 ***.`
2015-07-28 13:03:05
想用STM32F407IGT6寫一個程序來控制機械手的基本運動,不知道該怎么寫。求高手指教。
2017-03-27 14:13:14
`注塑機機械手的所有動作都在控制系統(tǒng)的指揮下完成,尤其是機械手與注塑機的協(xié)調(diào)工作關(guān)系,更是要依賴控制系統(tǒng)來達到。在控制系統(tǒng)的指揮下,機械手按照預(yù)定的工作程序完成各個動作,從而將注塑生產(chǎn)出的制品從模具
2012-09-11 09:43:54
、使用網(wǎng)口相機和集成工控機,性能穩(wěn)定可靠3、軟件可操作性好,可支持與觸摸屏聯(lián)機操作4、通過識別產(chǎn)品特征,計算產(chǎn)品偏移值,控制機械手進行定位抓取5、可根據(jù)客戶具體機型進行定制化的高效方案6、機械手操作靈活
2021-05-18 09:40:06
可操作性好,可支持與觸摸屏聯(lián)機操作;4、通過識別產(chǎn)品特征,計算產(chǎn)品偏移值,控制機械手進行定位抓取;5、可根據(jù)客戶具體機型進行定制化的高效方案;6、機械手操作靈活、占地空間小。深圳機械手視覺分揀系統(tǒng)參數(shù)如下
2021-09-22 15:33:10
,全工業(yè)級設(shè)計,上位機10寸觸摸屏方便人機交互,電子脈沖手輪用于示教編程,可實現(xiàn)零基礎(chǔ)編程。那么深圳上下料機械手系統(tǒng)有哪些特點?相信不少人是有疑問的,今天深圳四元數(shù)就跟大家解答一下!深圳上下料機械手
2021-09-27 14:51:00
操作方法。可快速投入使用,生產(chǎn)速率快速一致。四元數(shù)上下料機械手系統(tǒng)采用 ARM9+FPGA ,全工業(yè)級設(shè)計,上位機10寸觸摸屏方便人機交互,電子脈沖手輪用于示教編程,可實現(xiàn)零基礎(chǔ)編程。產(chǎn)品特點:1、單
2021-08-12 10:28:21
四元數(shù)關(guān)節(jié)式機械手系統(tǒng)是由多個關(guān)節(jié)組成,以軸與軸之間的多自由度轉(zhuǎn)動作為運動軌跡的一種自動化機器人。它是國內(nèi)較早出現(xiàn)的一批機械手,多應(yīng)用于原子能工業(yè)中,后來在汽車制造業(yè)、注塑業(yè)應(yīng)用的最為廣泛,也是目前
2021-10-21 13:46:57
關(guān)節(jié)式機械手是一種適用于靠近機體操作的傳動形式。它像人手一樣有肘關(guān)節(jié),可實現(xiàn)多個自由度,動作比較靈活,適于在狹窄空間工作。四元數(shù)關(guān)節(jié)式機械手系統(tǒng)采用 linux操作系統(tǒng),全工業(yè)級設(shè)計,上位機
2021-08-13 09:56:19
、高效率、高穩(wěn)定性的視覺對位算法2、使用網(wǎng)口相機和集成工控機,性能穩(wěn)定可靠3、軟件可操作性好,可支持與觸摸屏聯(lián)機操作4、通過識別產(chǎn)品特征,計算產(chǎn)品偏移值,控制機械手進行定位抓取5、可根據(jù)客戶具體機型進行定制
2021-08-11 09:43:18
哪位大俠那里有愛普生機械手的資料啊!
2014-04-11 20:36:53
五軸機械手主臂的負載慣量是如何去計算的?五軸機械手主臂的負載轉(zhuǎn)矩是如何去計算的?
2021-06-28 09:17:36
思路是用labvie輸出串口信號控制一個舵機控制器,機械手的相應(yīng)算法在labview編制的程序中完成,那么我肯定要用到D-H變換之類的算法,相應(yīng)的運動控制或機械手控制算法應(yīng)該是有模塊的吧,好像還能仿真吧,我應(yīng)該要下載哪些呢?通過算法計算后,最終的目的是輸出角度信號給舵機,讓舵機運動。
2015-07-15 17:26:24
請問用STM32板子怎樣去控制一個機械手系統(tǒng)啊?
2017-03-09 21:15:24
在弄一個項目,需要用到機械手。基本全程都是要么機械手發(fā)送信號,labview接收信號;要么就是labview發(fā)送信號,機械手接收信號再動作。如果放在一個框內(nèi)感覺程序太長了,請問有沒有什么設(shè)計模式比較適合這種情況的?
2021-05-07 09:09:23
由STM32控制的機械手,上位機程序是由C#編寫的用串口與單片機通訊。機械手有三個舵機組成和一個電磁鐵組成。視頻地址:http://www.iqiyi.com/w_19ru5ldh91.html
2017-01-26 13:13:42
PLC機械手控制的實現(xiàn)二、設(shè)計要求:1. 闡述機械手的工作原理2. 如何實現(xiàn)PLC對機械手的控制3. 機械手控制程序設(shè)計第一節(jié) 機械手的工作原理1.1 機
2008-12-13 14:15:22 379
379 論述了三軸數(shù)控上下料機械手的主要結(jié)構(gòu)及特點。
2009-04-07 11:02:4217 基于PLC控制系統(tǒng)的平面噴涂機械手摘要:本文論述了一套平面噴涂機械手裝置的設(shè)計過程。該系統(tǒng)由機械部分和控制部分構(gòu)成,機械部分包括大臂、小臂、氣缸等;控制部分采
2009-05-15 01:01:0359 基于現(xiàn)場總線的開放結(jié)構(gòu)機械手控制系統(tǒng)是目前機械手控制的發(fā)展方向。文章通過對物料搬運機械手裝置及其控制系統(tǒng)的介紹,提出了基于CAN 總線的機械手控制系統(tǒng)方案,分析了
2009-06-03 09:10:2928 對IGM焊接機械手常見的故障進行分析,對故障現(xiàn)象提出了經(jīng)濟有效的解決方法。關(guān)鍵詞:IGM焊接機械手+傳感器+譯碼器
2009-07-15 10:02:5733 機械手資料
mechanical hand, 也被稱為自動手,auto hand 能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置
2010-03-31 14:57:24286 控制要求:機械手一個工作周期可分為八步:第一步是當左工作臺上有工件出現(xiàn)時,I1.5=1,機械手開始下降,下降到位時,I0.5=1,停止下降,第一步結(jié)束。第二步是機械手
2010-07-08 12:35:5466 電視機背板機械手雙工位連續(xù)光纖焊接設(shè)備應(yīng)用范圍: 激光焊機可應(yīng)用范圍:動力電池、電子原件、傳感器、鐘表、精密機械、通信、電機馬達轉(zhuǎn)子、汽車安全氣囊
2024-09-21 14:10:23
實驗 機械手的PLC的自動控制一.實驗?zāi)康?. 掌握機械手步進控制程序設(shè)計2. 進一
2008-09-30 12:27:205741 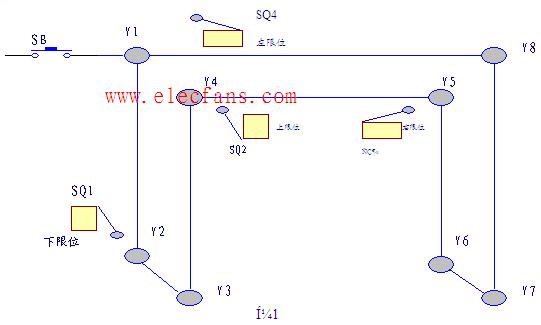
機械手行車控制電路
2009-02-09 16:13:081643 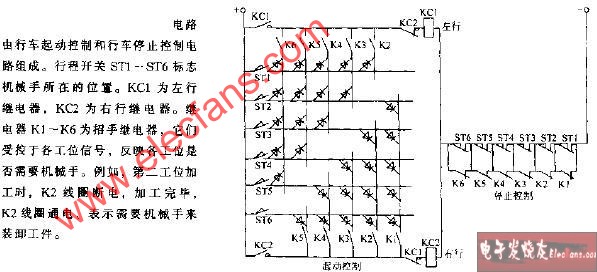
基于PLC控制的注塑機專用機械手
目前,市場上流行的注塑機專用機械手就控制系統(tǒng)而言都是使用專用的微處理機加接口組成的最小控制
2009-06-16 15:24:072300 
PLC在機械手控制系統(tǒng)上的應(yīng)用
機械手在工業(yè)生產(chǎn)中得到廣泛的應(yīng)用,傳統(tǒng)工藝中采用繼電器控制時,需要的繼電器多,接線復(fù)雜,因 此
2009-06-17 13:35:4710649 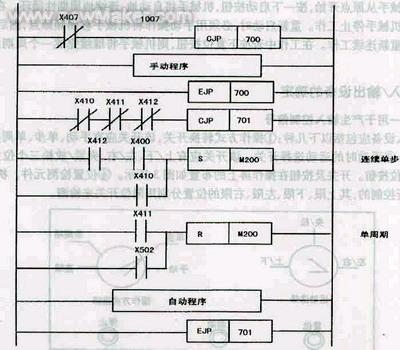
PLC在機械手步進控制中的應(yīng)用
機械手是工業(yè)自動控制領(lǐng)域中經(jīng)常遇到的一種控制對象。機械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:082256 
磁帶庫的機械手交換速度 機械手是磁帶庫產(chǎn)品里面成本很高的一個部件,它負責(zé)磁帶的加載和卸載工作
2010-01-09 10:00:161057 提醒廣大機械手用戶朋友,在拆除機械手的時候,應(yīng)注意以下步驟: 1.關(guān)掉射出機電源。 2.關(guān)掉機械手電源。 3.關(guān)掉機械手氣壓源。 4.洩除空壓。 5.放
2010-07-28 09:51:234323 一四軸聯(lián)動簡易機械手的結(jié)構(gòu)及動作過程 ??? 機械手結(jié)構(gòu)如下圖1所示,有氣控機械手(1)、XY軸絲杠組(2)、轉(zhuǎn)盤機構(gòu)(3)、旋轉(zhuǎn)基座(4)等組成。
2010-08-02 18:17:316707 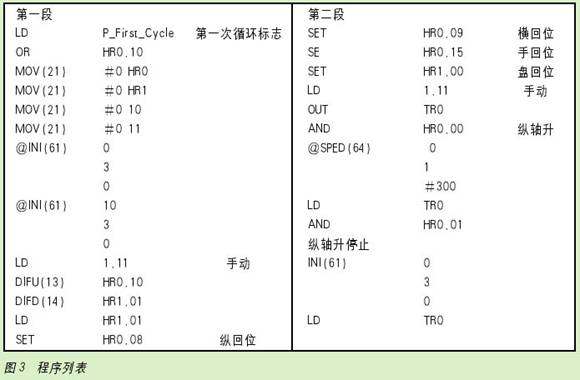
本內(nèi)容詳細介紹了PAC實現(xiàn)三維機械手的解決方案
2011-07-06 15:18:1329 通過對物料搬運機械手裝置結(jié)構(gòu)與功能的介紹,提出了一種電氣伺服和氣動伺服相結(jié)合的混合驅(qū)動機械手結(jié)構(gòu)類型,重點分析了基于45, 的機械手控制系統(tǒng)組成,并詳細論述了以45, 為核
2011-08-15 17:49:36101 基于PLC的機械手控制設(shè)計(畢業(yè)設(shè)計)基于PLC的機械手控制設(shè)計(畢業(yè)設(shè)計)
2015-11-13 11:21:000 機器人機械手畢業(yè)設(shè)計論文模板機器人機械手畢業(yè)設(shè)計論文模板
2016-03-07 11:55:1132 真空吸盤式機械手論文,介紹了機械手的組成,工作原理,執(zhí)行機構(gòu)等
2016-05-11 16:40:557 本資料介紹了拓斯達機械手的操作和設(shè)置方法!
2016-06-23 17:56:19231 Nuada的初創(chuàng)公司開發(fā)了一種質(zhì)地柔軟的機械手套,這種手套可以緩解人們由于手部疼痛而帶來的抓握無力現(xiàn)象。
2017-09-29 11:41:551688 相對傳統(tǒng)的機器人專用控制器控制方式,基于PC的運動控制卡控制具有成本低、開發(fā)自由度高、與行業(yè)應(yīng)用更加匹配等優(yōu)勢。領(lǐng)略數(shù)控具備寫機械手路徑控制的能力,應(yīng)用研華PCI-1245-AE運控卡實現(xiàn)了對SCARA機械手的運動控制。
2017-09-30 15:59:4422 東芝機械手手動控制示教操作
2017-10-20 10:23:527 互聯(lián)網(wǎng)+和工業(yè)技術(shù)的相互結(jié)合,更多的智能化的產(chǎn)品逐漸面世。而文中則將當下較為熱門的體感操作和傳統(tǒng)工業(yè)中的機械手相互結(jié)合,探索一種全新的機械手操作方式體感操作機械手。區(qū)別于傳統(tǒng)的機械手的示教編程的操作方式,體感機械手利用體感傳感器
2018-01-22 17:14:588 機械手設(shè)計必看
2018-02-01 15:14:5483 基于PLC的機床上料機械手由行車卡爪、連接分度盤及機械手卡爪組成。其控制系統(tǒng)設(shè)計選用基于PLC的自動化控制系統(tǒng)。基于PLC的機床上料機械手首要功能便是裝載,裝載過程如下:行車行進過程中定位,行車卡爪
2018-02-06 17:38:048 隨著計算機控制技術(shù)、無線傳感器技術(shù)及果蔬采摘設(shè)備的日益結(jié)合與發(fā)展更新,農(nóng)業(yè)果蔬的采摘機器人機械手避障系統(tǒng)的研究更為深入具體,更適應(yīng)實際場合果蔬采摘。為此,從無線傳感器應(yīng)用技術(shù)角度入手,針對機械手在
2018-02-09 16:40:560 、使用安全、維護方便、靈活性強,適用于倉儲行業(yè)和零件加T車間的物料搬運、自動生產(chǎn)線上的裝配定位等應(yīng)用場合。 針對氣動平衡助力機械手負載端力臂不斷變化的隨位平衡問題,提出通過反饋控制實現(xiàn)機械手隨位平衡方法。在采集
2018-02-28 14:08:202 針對目前傳統(tǒng)抓胎機械手在取胎過程中易發(fā)生胎坯變形不對稱和變形量大的問題,對抓胎機械手取胎過程巾影響胎坯縱向和橫向變形的主要因素進行了研究,提出了定位內(nèi)撐一體的抓取方法;并結(jié)合實際宮作要求,從抓胎
2018-03-07 16:36:221 平臺機械手定位方法;設(shè)計了可重復(fù)利用、驅(qū)一動分離的自動化、低成本高鐵車廂預(yù)裝配柔性實驗平臺機械手;通過ANSYS有限元分析T具對機械手關(guān)鍵零部件的強度進行了分析,驗證了機械手結(jié)構(gòu)的安全可靠性,獲得了機械手的優(yōu)化結(jié)
2018-03-20 17:59:270 1.機械手要將工件從工位A移到工位B處;2.機械手的初始狀態(tài)(原點條件)是機械手應(yīng)停在工位A的上方,SQ1、SQ3均閉合;
2018-04-23 11:22:5919398 
分類。 按驅(qū)動方式可分為機械式機械手、液壓式機械手、氣動式機械手和電動式機械手等。 按搬運重量可分為微型機械手、小型機械手、中型機械手和大型機械手等; 按坐標型式可分為直角坐標式機械手、圓柱坐標式機械手、極坐標式
2021-02-24 15:12:551019 在最新款的擬人化機械手—雄克SCHUNK五指機械手SVH中,整套電子裝置集成在腕關(guān)節(jié)處,精實的設(shè)計,讓機械手能做出與人類更相近的動作。該機械手通過特定的法蘭接頭可與市場上現(xiàn)有的機械手臂相互連接。
2019-02-19 12:44:162221 本文檔的主要內(nèi)容詳細介紹的是機械手的詳細資料合集十二個文檔免費下載包括了:機械手PLC控制系統(tǒng)的設(shè)計,機械手的結(jié)構(gòu)尺寸與夾持誤差計算,基于PLC控制的氣動機械手實驗裝置的研制,基于機械手的全氣動或
2019-04-22 08:00:0029 首先講一下在工業(yè)應(yīng)用中,手和眼(攝像機)的兩種位置關(guān)系,第一種是將攝像機(眼)固定在機械手(手)上面,眼隨手移動;第二種是攝像機(眼)和機械手(手)分離,眼的位置相對于手是固定的
2019-05-07 16:18:107436 麻省理工學(xué)院計算機科學(xué)與人工智能實驗室(MIT-CSAIL)的研究人員近日開發(fā)了一種低成本的傳感器手套,旨在使人工智能能夠“弄清楚”人類如何通過觸摸識別物體。
2019-06-04 16:52:213540 ,比如撥動開關(guān),按壓按鍵,甚至扭動門閥等復(fù)雜動作。相比傳統(tǒng)手柄控制器,力反饋手套可以讓用戶在虛擬世界中完成更精密復(fù)雜的手部操作,實現(xiàn)貼近真實的體驗, 并達成更好的培訓(xùn)效果。
2019-06-15 10:35:314285 那么,機械手內(nèi)部到底是什么樣的,有什么奧秘嗎?下面和大家分享一下氣動機械手的主要結(jié)構(gòu)。
2019-07-11 14:59:4014506 
ABB機械手操作手冊免費手冊。
2021-05-07 14:07:0218 從國內(nèi)市場來看,生產(chǎn)制造業(yè)全自動碼垛機械手遍及使用汽車零部件行業(yè)、包裝機械、環(huán)保機械、儀器儀表等自動化行業(yè),而很多新行業(yè)對全自動生產(chǎn)制造業(yè)碼垛機械手的需求量也不斷上升,推動著碼垛機械手的開展。傳統(tǒng)
2021-05-27 14:58:142102 操作迷宮模型,并控制小球按照特定路線、走向迷宮終點。在沒有任何位置約束的前提下,機械手的方向控制精度達 1.20° ± 1.38°。 在堆疊杯子的應(yīng)用中,針對桌上五個杯子,機械手能按大小順序、依次拿起其中四個,然后堆疊到藍色杯子上。 為讓任務(wù)更具挑戰(zhàn)性,杭
2021-06-15 15:31:042459 基于壓力反饋控制的車間機械手智能防撞監(jiān)測系統(tǒng)
2021-07-01 15:50:326 手動機械手程序資料
2021-12-08 09:20:423 亞龍YL236機械手的接線圖,競賽時根據(jù)任務(wù)按圖接線即可。
2022-03-07 15:47:487 staubli機械手操作手冊免費下載。
2022-05-24 15:17:439 電子發(fā)燒友網(wǎng)站提供《使用EMG的機械手控制.zip》資料免費下載
2022-11-07 11:02:5010 電子發(fā)燒友網(wǎng)站提供《手勢控制機械手開源分享.zip》資料免費下載
2022-11-11 15:14:333 電子發(fā)燒友網(wǎng)站提供《如何用Arduino制作遙控機械手.zip》資料免費下載
2023-01-31 09:16:250 具有人類觸覺的柔軟機械手開啟了假肢研究的新領(lǐng)域。手是人類身體接觸所有事物的重要部分,不僅具有觸摸、抓取和抓握的功能,而且指尖還擁有非常敏感且與身體其他部分相連的感覺神經(jīng)。
2023-02-27 10:27:091552 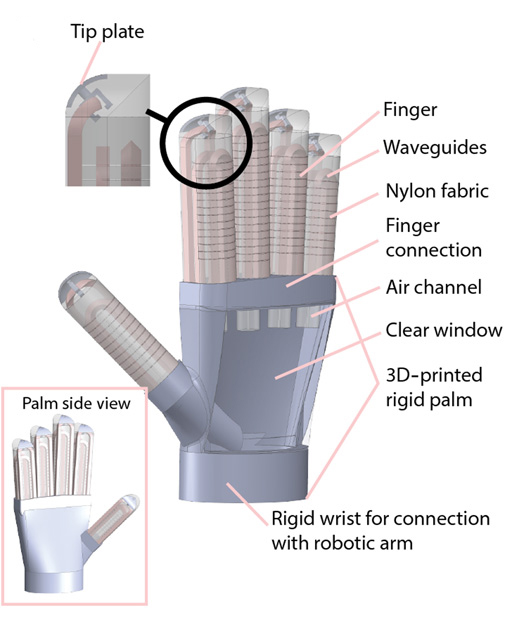
拆包機械手
2023-03-23 11:11:281415 平面關(guān)節(jié)型機械手設(shè)
2023-05-29 11:11:331 本文系統(tǒng)設(shè)計由開發(fā)者針對目前的一些上肢肢體不健全、自主進食有困難的特殊群體,所提出的一款輔助進食的服務(wù)型桌面機械手控制系統(tǒng),以語音、機器視覺等傳感器技術(shù)為機器人提供人機交互的接口以及系統(tǒng)的反饋接口
2022-02-18 10:09:441530 
梳理、分析了核化工項目中各類機械手的工作原理和功能特點,并就各類機械手的適用場景進行了對比,介紹了在選擇和設(shè)計機械手時需考慮的因素,總結(jié)了當前的研究進展和未來的發(fā)展趨勢,以期為今后其他項目的機械手
2023-06-25 14:23:053139 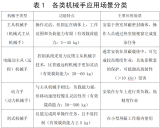
電子發(fā)燒友網(wǎng)站提供《如何制作無線/手勢控制機械手.zip》資料免費下載
2023-07-10 15:04:424 觸覺感知技術(shù)在人機交互領(lǐng)域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結(jié)構(gòu)化的場景交互中為人們提供多模態(tài)感知信息
2023-10-17 09:05:202117 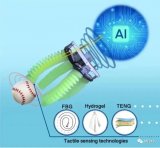
模板的尺寸直接決定了注塑機機械手的行程;安全門的高度關(guān)系到貨物從模具內(nèi)部順利取出到模具外部的情況。在確定了這兩個關(guān)鍵標準后,有必要考慮注塑機機械手的有效載荷是多少,以及它是否滿足注塑制品的重量。之后
2023-10-18 08:07:451368 
觸覺感知技術(shù)在人機交互領(lǐng)域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結(jié)構(gòu)化的場景交互中為人們提供多模態(tài)感知信息,如接觸狀態(tài)(穩(wěn)態(tài)、滑動、扭轉(zhuǎn)等)、表面特征(粗糙度、紋理、曲率等)、物理屬性
2023-10-18 10:35:041124 直線模組是一種常見的機械傳動裝置,廣泛應(yīng)用于機械手等自動化設(shè)備中,在機械手中的主要作用是實現(xiàn)機械手的運動控制和定位。
2023-12-07 17:38:281557 
ZR機械手:技術(shù)升級,推動產(chǎn)業(yè)變革 隨著科技的飛速發(fā)展,自動化設(shè)備在各個產(chǎn)業(yè)領(lǐng)域中的應(yīng)用越來越廣泛。作為自動化設(shè)備的重要組成部分,機械手在提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量、降低勞動成本等方面發(fā)揮
2024-01-11 09:21:591247 隨著工業(yè)自動化技術(shù)的飛速發(fā)展,機械手作為現(xiàn)代制造業(yè)中不可或缺的重要設(shè)備,其智能化、自動化水平不斷提高。在機械手控制系統(tǒng)中,PLC(可編程邏輯控制器)因其可靠性高、編程簡單、功能強大等優(yōu)點,被廣泛應(yīng)用
2024-06-17 10:46:003555 機器視覺控制機械手是一種將機器視覺技術(shù)與機械手控制技術(shù)相結(jié)合的自動化技術(shù)。它通過機器視覺系統(tǒng)獲取目標物體的圖像信息,然后利用圖像處理技術(shù)對圖像進行分析和處理,從而實現(xiàn)對機械手的精確控制。以下是機器
2024-07-04 10:40:121786 ? ? ? 在選擇搬運機械手的電機時,需要考慮多個因素以確保電機的性能滿足機械手的運行需求。以下是一個詳細的案例分析,說明如何為搬運機械手選擇合適的電機。 ? ? ? ? 一、電機類型選擇
2025-01-21 16:44:451594 
主控,伺服電機負責(zé)機械手臂的精確定位。分布式I/O模塊通過ethercat連接視覺傳感器和力反饋系統(tǒng)。機械手6軸協(xié)同運動控制,位置精度達±0.02mm。安川伺服完美兼容兩種協(xié)議的控制指令,確保平穩(wěn)運行。實現(xiàn)生產(chǎn)狀態(tài)數(shù)據(jù)的統(tǒng)一采集,支持設(shè)備預(yù)防性維護。
2025-03-18 14:11:01475 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論