 西門子PLC入門級應用實例,簡易機械手的控制
西門子PLC入門級應用實例,簡易機械手的控制

今天,小編給大家介紹一個西門子PLC入門級應用實例,簡易機械手的控制。
下面進入正題:

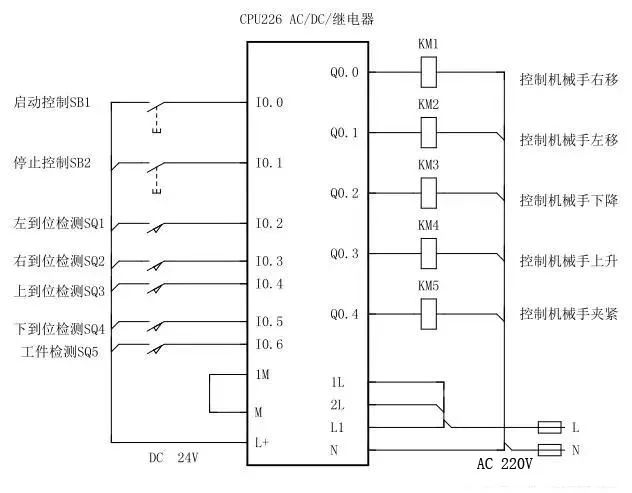
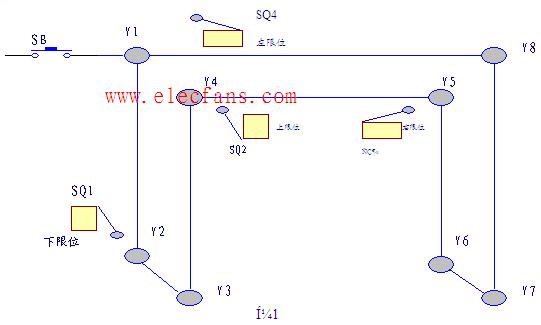
如上圖所示,M1為控制機械手左右移動的電動機,M2為控制機械手上下升降的電動機,YV線圈用來控制機械手夾緊防松,SQ1為左到位檢測開關,SQ2為右到位檢測開關,SQ3為上到位檢測開關,SQ4為下到位檢測開關 ,SQ5為工件檢測開關。
控制要求如下:
1.機械手要將工件從工位A移到工位B處;
2.機械手的初始狀態(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
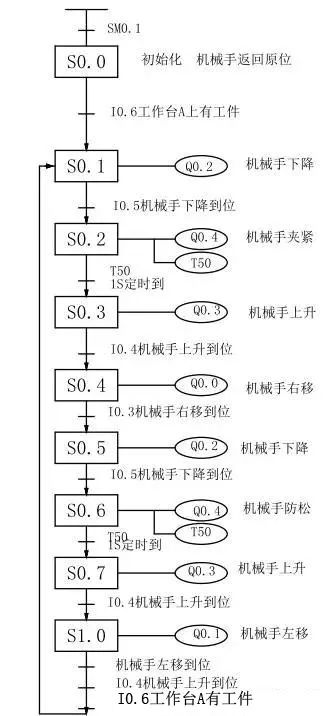
3.若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機械手按“原點→下降→夾緊→上升→右移→下降→防松→上升→左移→原點”的步驟工作。
如下圖所示:
編程前理順動作如何轉移:
定義符號表:

硬件的接線圖:
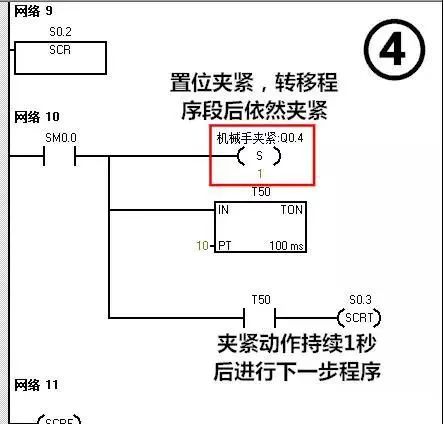
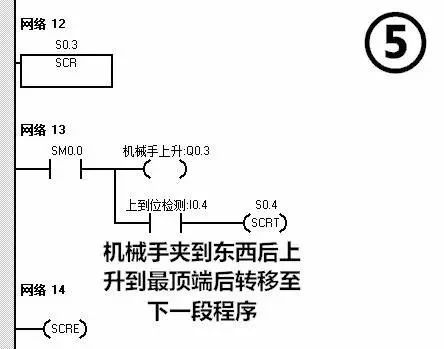
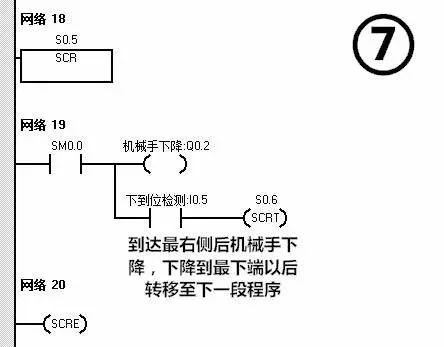
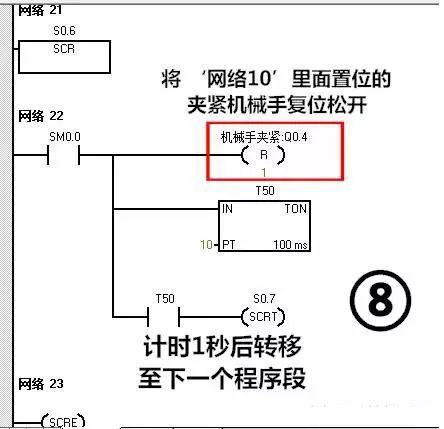
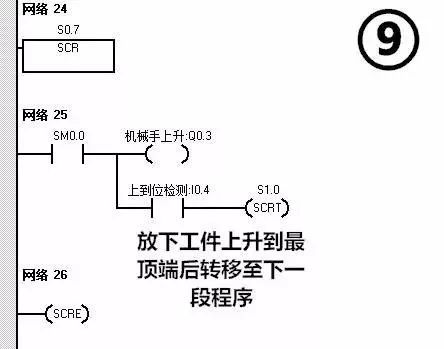
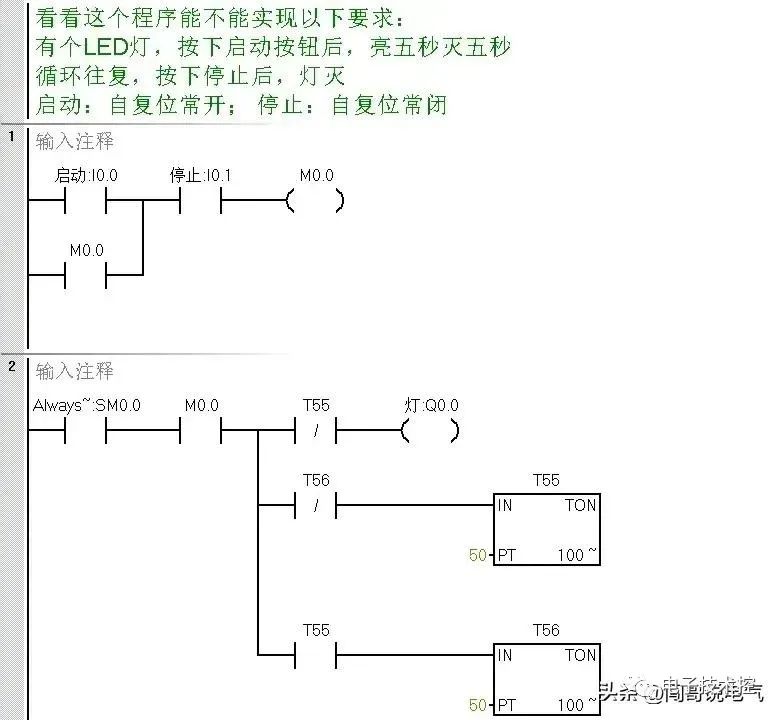
滿足所有動作的程序如下:
下面我們一段一段分析這個機械手是如何工作的:





聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5051文章
14679瀏覽量
487779 -
西門子
+關注
關注
98文章
3350瀏覽量
120564
原文標題:西門子PLC入門級應用實例|自動搬運機械手控制系統設計
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
西門子S7-1200/1500PLC氣動機械手程序
西門子1200/1500PLC的氣動機械手搬運硬件組成包括:工件到位光電開關、升降氣缸、平移氣缸、夾抓氣缸、氣缸磁性開關等。自動動作過程:工件到位光電開關亮→升降氣缸降→夾抓抓取工件→升降氣缸升


西門子S7-1200/1500PLC經典氣動機械手程序
電子發燒友網站提供《西門子S7-1200/1500PLC經典氣動機械手程序.docx》資料免費下載
發表于 09-20 15:32
?19次下載
西門子plc模塊型號詳解
和S7-1500等型號。下面分別介紹這些型號的模塊。 1.1 S7-200系列PLC模塊 S7-200系列是西門子PLC的入門級產品,適用于小型自動化系統。
PLC在機械手控制系統中的具體應用
隨著工業自動化技術的飛速發展,機械手作為現代制造業中不可或缺的重要設備,其智能化、自動化水平不斷提高。在機械手控制系統中,PLC(可編程邏輯控制



 工商網監
工商網監
評論