本文以FPGA作為核心處理器,提出了一種基于FPGA多路機(jī)載冗余圖像處理系統(tǒng)的設(shè)計(jì)方案。##整個(gè)系統(tǒng)顯示的分辨率為1600×1200@60 Hz,信號(hào)位為真彩色24b,則一幀圖像所需需要存儲(chǔ)的容量C≈47 Mb。##讀寫(xiě)操作交替進(jìn)行仿真圖如圖5所示。圖5中包含了兩個(gè)寫(xiě)入操作,一個(gè)讀取操作。
2014-01-07 10:28:32 3905
3905 
根據(jù)線陣CCD圖像檢測(cè)和識(shí)別系統(tǒng)的要求,分析線陣CCD圖像與子圖像的位置關(guān)系,采用“圖像轉(zhuǎn)置緩沖區(qū)”和讀寫(xiě)狀態(tài)機(jī)的處理方式,設(shè)計(jì)基于FPGA 的線陣CCD 子圖像提取模塊,具有FPGA 資源占用少、邏輯清晰的特點(diǎn)。用MATLAB 和Modelsim 軟件進(jìn)行聯(lián)合仿真,驗(yàn)證了設(shè)計(jì)的正確性。
2014-02-18 15:34:541778 
對(duì)于一副測(cè)試圖像,提取得到的2000個(gè)proposal經(jīng)過(guò)CNN特征提取后輸入到SVM分類器預(yù)測(cè)模型中,可以給出特定類別評(píng)分結(jié)果。
2020-08-27 16:35:154317 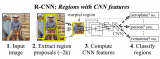
邊緣和輪廓的提取是一個(gè)非常棘手的工作,細(xì)節(jié)也許就會(huì)被過(guò)強(qiáng)的圖像線條掩蓋,紋理(texture)本身就是一種很弱的邊緣分布模式,分級(jí)(hierarchical)表示是常用的方法,俗稱尺度空間
2020-10-07 15:23:002989 
有多種 3D 傳感器方案來(lái)實(shí)現(xiàn)深度感知系統(tǒng),包括立體視覺(jué)相機(jī)、激光雷達(dá)和TOF(飛行時(shí)間)相機(jī)。每個(gè)選擇都有其優(yōu)缺點(diǎn),其中,嵌入式深度感知立體系統(tǒng)成本低,堅(jiān)固耐用,適合戶外使用,并且能夠提供高分辨率的彩色點(diǎn)云。
2022-08-23 16:45:151873 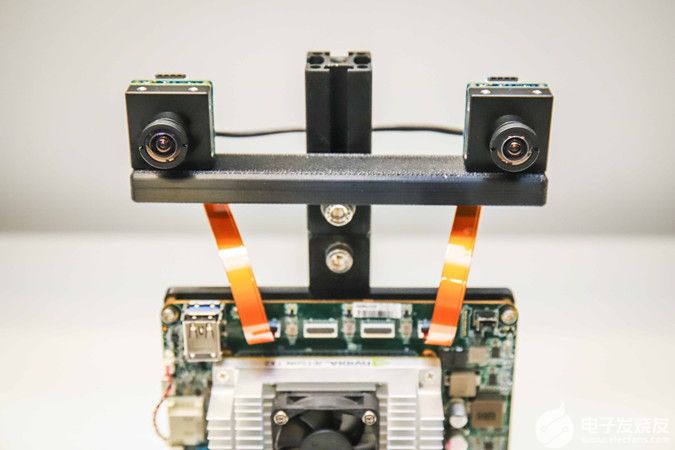
嗨,我們正在使用連接到一臺(tái)電腦的多臺(tái)D415相機(jī),通常工作正常。最近我們發(fā)現(xiàn)幾個(gè)傳感器收集不正確的深度圖不規(guī)則,在過(guò)去3個(gè)月大約10次。看到這個(gè)圖像集。如您所見(jiàn),彩色圖像是正確的。但由于不明原因
2018-11-19 14:19:13
我從英特爾 - RealSense-D400系列 - 數(shù)據(jù)表.pdf第94頁(yè)的圖紙中推測(cè),深度傳感器的中心距攝像機(jī)右側(cè)(USB側(cè))37.5毫米:根據(jù)經(jīng)驗(yàn),我推斷深度圖焦點(diǎn)X在相機(jī)的臉后面約32mm
2018-12-05 10:52:34
`一、labview直方圖程序介紹1、前面板2、程序框圖3、圖片二、基本概念介紹邊緣:圖像的基本特征,具有灰度值不連續(xù)的性質(zhì),即不同灰度值的相鄰區(qū)域之間。邊緣點(diǎn):對(duì)于于一階微分幅度的最大值點(diǎn)以及二階
2020-12-01 12:16:30
圖像如:人,將人的邊緣輪廓提取出來(lái)!急急急急。。。。有這方面材料的兄弟救救急啊啊啊啊啊啊
2013-03-04 12:53:04
要的不變性質(zhì):光線的變化顯著地影響了一個(gè)區(qū)域的外觀,但是不會(huì)改變它的邊緣。最重要的是人的視覺(jué)系統(tǒng)也是對(duì)邊緣最敏感的。邊緣檢測(cè)是圖像處理中的重要內(nèi)容。邊緣是圖像的最基本特征,是圖像分割、特征提取和圖像識(shí)別的前提
2015-07-07 19:39:57
部分,首先是最重要的部分,sobel邊緣檢測(cè)(硬件加速模塊)Sobel算子主要用作邊緣檢測(cè),在技術(shù)上,它是一離散性一階差分算子,用來(lái)運(yùn)算圖像亮度函數(shù)的一階梯度之近似值。在圖像的任何一點(diǎn)使用此算子,將會(huì)
2015-07-07 20:41:34
本帖最后由 eehome 于 2013-1-5 09:51 編輯
入侵報(bào)警系統(tǒng)設(shè)計(jì)方案
2012-08-18 15:36:22
以下是基于 DSP5509 進(jìn)行數(shù)字圖像處理中 Sobel 算子邊緣檢測(cè)的硬件設(shè)計(jì)方案:
一、總體架構(gòu)
圖像采集:使用合適的圖像傳感器,如 CMOS 傳感器,通過(guò)相應(yīng)的接口(如 SPI、I2C 等
2024-09-25 15:25:29
”特征的算法,同時(shí)根據(jù)學(xué)習(xí)到的“經(jīng)驗(yàn)數(shù)據(jù)”,從而能把圖片中的貓都識(shí)別出來(lái)。基于“深度學(xué)習(xí)”的智能分類 智能機(jī)器人就是通過(guò)搭載“深度學(xué)習(xí)”系統(tǒng),實(shí)現(xiàn)對(duì)環(huán)境參數(shù)的感知,從而智能判斷自己應(yīng)該執(zhí)行什么程序,包括
2018-05-31 09:36:03
【摘要】:針對(duì)依賴傳統(tǒng)Canny算子的基于邊緣的圖像檢索系統(tǒng)所存在的不足,提出一種基于Canny邊緣檢測(cè)的圖像檢索算法。使用改進(jìn)的Canny算子提取圖像邊緣特征,將該特征通過(guò)傅里葉描述子轉(zhuǎn)化為向量
2010-04-24 10:03:36
`基于FPGA的圖像拉普拉斯邊緣提取 AT7_Xilinx開(kāi)發(fā)板(USB3.0+LVDS)資料共享 騰訊鏈接:https://share.weiyun.com/5GQyKKc 百度網(wǎng)盤鏈接
2019-07-10 09:12:31
邊緣檢測(cè)技術(shù)的主要應(yīng)用、FPGA技術(shù)在國(guó)內(nèi)外的發(fā)展現(xiàn)狀及應(yīng)用、系統(tǒng)設(shè)計(jì)的主要內(nèi)容及方案、系統(tǒng)的設(shè)計(jì)流程。
還會(huì)介紹基于FPGA實(shí)現(xiàn)圖像的實(shí)時(shí)采集部分,包括圖像信息的實(shí)時(shí)采集,攝像頭型號(hào)及其參數(shù),SCCB
2023-06-21 18:47:51
摘要 :本文設(shè)計(jì)了一種 基于 FPGA 的實(shí)時(shí)邊緣檢測(cè)系統(tǒng) ,使用OV5640 攝像頭模塊獲取實(shí)時(shí)的視頻圖像數(shù)據(jù),提取圖像邊緣信息并通過(guò) VGA顯示。FPGA 內(nèi)部使用流水線設(shè)計(jì)和 并行運(yùn)算加速
2024-05-24 07:45:44
`基于FPGA的數(shù)字圖像處理領(lǐng)域的邊緣檢測(cè)系統(tǒng)。該系統(tǒng)實(shí)現(xiàn)了從24位真彩色圖片的存儲(chǔ)到VGA顯示邊緣信息。`
2013-06-26 13:36:53
嗨,大家好,我試圖從深度圖像中找到幾個(gè)中心像素。我正在嘗試實(shí)現(xiàn)分割,我需要找到分割對(duì)象的距離。這就是我的想法,這將是有效的。當(dāng)彩色圖像用于分割時(shí),全幀深度圖像將用于找到距離。在我的下面的代碼中。我
2018-11-19 14:19:48
我從realsense查看器中獲取d435深度相機(jī)的數(shù)據(jù),當(dāng)我保存深度圖像的快照時(shí),我在規(guī)格中得到8位(1-256)灰度圖像,據(jù)說(shuō)相機(jī)給出了16位深度圖片。你知道我怎么能得到16位圖像?以上
2018-11-27 14:11:37
引言邊緣可定義為圖像中灰度發(fā)生急劇變化的區(qū)域邊界,它是圖像最基本的特征,是圖像分析識(shí)別前必不可少的環(huán)節(jié),是一種重要的圖像預(yù)處理技術(shù)。邊緣檢測(cè)主要就是(圖像的)灰度變化的度量、檢測(cè)和定位,它是圖像分析
2019-07-31 06:38:07
對(duì)于自主機(jī)器人導(dǎo)航和其它機(jī)器視覺(jué)應(yīng)用來(lái)說(shuō),實(shí)時(shí)深度感知是很關(guān)鍵的。目前通過(guò)立體圖像來(lái)計(jì)算深度的算法計(jì)算量很大,例如差異測(cè)繪,要占用CPU大量的時(shí)間,或者需要用昂貴的器件進(jìn)行實(shí)時(shí)操作。
2019-10-17 08:28:30
例提供一個(gè)正方體的圖片,通過(guò)邊緣檢測(cè)提取出它的棱上的一系列點(diǎn),如何通過(guò)這些點(diǎn)還原成數(shù)個(gè)方程組
2015-05-13 18:24:44
圖像傳感器、深度感知、傳感器融合,是感知未來(lái)發(fā)展的三個(gè)趨勢(shì),而汽車、機(jī)器視覺(jué)、邊緣人工智能(Edge AI)是智能感知最聚焦的3大應(yīng)用市場(chǎng)。安森美半導(dǎo)體是全球唯一一家提供完整感知模式及方案的公司
2019-07-30 07:16:18
FPGA是如何實(shí)現(xiàn)圖像的邊緣檢測(cè)的?怎樣去設(shè)計(jì)一種基于FPGA的實(shí)時(shí)圖像邊緣檢測(cè)系統(tǒng)?
2021-10-19 10:10:23
我現(xiàn)在只是做到了一般的東西,但是在vision上找不到角點(diǎn)提取與邊緣提取的函數(shù)不知道怎么弄,求大神指導(dǎo)
2013-04-26 17:48:56
求一款LDS6204防水汽電容觸摸的設(shè)計(jì)方案
2021-06-01 06:19:54
本文給出了一種基于ADV202的JPEG2000圖像壓縮與解壓縮系統(tǒng)的設(shè)計(jì)方案。
2021-04-20 06:36:31
求一種基于FPGA的鎖相環(huán)位同步提取電路的設(shè)計(jì)方案。
2021-04-29 06:52:21
求大佬分享一種多光譜可見(jiàn)光遙感圖像壓縮系統(tǒng)的設(shè)計(jì)方案
2021-06-02 06:39:48
的請(qǐng)求,并驅(qū)動(dòng)液晶顯示器顯示視頻圖像。本實(shí)例除了前面提到對(duì)原始圖像做DDR3緩存和顯示,還會(huì)在原始圖像緩存到DDR3之前,另外做圖像的多行緩存和拉普拉斯邊緣提取處理,獲得新的圖像流,這個(gè)圖像流通
2019-12-19 09:45:41
`原圖像如下圖1所示: 圖1我用邊緣檢測(cè)后的圖像如圖2 所示圖 2我想接著把人物的輪廓提取出來(lái)其他都不要應(yīng)該怎么實(shí)現(xiàn),希望高手能給予指點(diǎn)`
2012-10-08 12:35:33
為了保證圖像采集的高速性和連續(xù)性,求一種適用嵌入式系統(tǒng)的數(shù)字圖像采集模塊設(shè)計(jì)方案?
2021-04-08 06:13:26
自動(dòng)泊車輔助、自動(dòng)緊急制動(dòng)、車道保持輔助、駕駛員疲勞警報(bào)等。基于攝像頭的感知功能在當(dāng)今的車輛中至關(guān)重要。感知系統(tǒng)的功能與人體具有很強(qiáng)的相似性:攝像頭或圖像傳感器充當(dāng)車輛的“眼睛”,數(shù)據(jù)從圖像傳感器發(fā)送到
2022-11-10 08:09:48
研究了小波技術(shù)在圖像邊緣提取中的應(yīng)用,解決了目前圖象中存在的局部分割問(wèn)題,提出了鏈的百分比概念;針對(duì)分割結(jié)果的不封閉性,采用邊緣點(diǎn)生長(zhǎng)的方法,有效地解決了區(qū)域
2009-06-06 16:09:15 12
12 本文提出了數(shù)學(xué)形態(tài)變換結(jié)合 Canny 邊緣算子提取圖像邊緣的方法,通過(guò)研究骨骼CT 圖像邊緣提取,證明該方法幾何意義明確,去噪效果明顯,性能優(yōu)越。關(guān)鍵詞 數(shù)學(xué)形態(tài)變換
2009-06-11 09:51:0812 本文提出了一種基于自適應(yīng)邊緣提取的人眼定位算法。首先通過(guò)高斯平滑濾波對(duì)原始圖像進(jìn)行預(yù)處理,然后利用Robert 算子進(jìn)行邊緣提取,并且以邊緣像素點(diǎn)的總數(shù)與圖像像素點(diǎn)的
2009-07-16 09:21:3019 在醫(yī)學(xué)圖像中,在相對(duì)較小的區(qū)域內(nèi)圖像頻率的陡峭變化反映了目標(biāo)對(duì)象的邊緣信息,基于Sobel 算子的梯度向量操作對(duì)低噪聲的醫(yī)學(xué)圖像的邊緣提取效果較好,采用Java技術(shù)
2009-07-30 09:23:1118 該文基于合成孔徑雷達(dá)(SAR)圖像低信噪比的特點(diǎn),設(shè)計(jì)了一種基于融合邊緣檢測(cè)的線性特征提取算法。首先采用融合Canny算子及ROA算子得到邊緣點(diǎn),然后利用Radon變換得出線基元,最
2009-11-17 15:20:5419 針對(duì)依賴傳統(tǒng)Canny算子的基于邊緣的圖像檢索系統(tǒng)所存在的不足,提出一種基于Canny邊緣檢測(cè)的圖像檢索算法。使用改進(jìn)的Canny算子提取圖像邊緣特征,將該特征通過(guò)傅里葉描述
2010-02-11 11:22:3428 提取隨機(jī)排列膠囊圖像中分離的、單個(gè)的邊緣,是膠囊缺陷檢測(cè)與計(jì)數(shù)的前提。隨機(jī)排列的膠囊具有傾斜度不確定和多膠囊粘連的特點(diǎn)。由此,本文先提取膠囊的邊緣,再將“點(diǎn)”連接
2010-02-21 11:00:3418 遙感圖像為地理信息系統(tǒng)數(shù)據(jù)的更新和應(yīng)用提供了有利條件,遙感圖像的特征提取是其中的關(guān)鍵問(wèn)題。針對(duì)灰色絕對(duì)關(guān)聯(lián)度計(jì)算模型的特點(diǎn),提出一種基于灰色絕對(duì)關(guān)聯(lián)度和圖像子塊標(biāo)
2010-03-01 14:15:327 后視鏡、增強(qiáng)現(xiàn)實(shí)抬頭顯示、智能座椅、域控制器等部件,可深度融合 ADAS、TBOX、車身、高精地圖等 信息,打造一體化智能座艙解決方案。智能座艙感知系統(tǒng)SCSS主要
2024-12-05 13:21:09
用戶提供便捷高效的3D感知能力。該產(chǎn)品通過(guò)Type C接口供電并同時(shí)輸出深度圖像和2D彩色圖像信息,支持3D點(diǎn)云與2D彩色圖像融合。產(chǎn)品特性1、支持切換深度/彩色
2024-12-23 16:23:21
提出了一種基于人眼微動(dòng)機(jī)理的邊緣提取算法.通過(guò)模擬眼球的微動(dòng),提取圖像的微動(dòng)邊緣,同時(shí)為了減少偽邊緣的產(chǎn)生,對(duì)其微動(dòng)邊緣圖像進(jìn)行均值濾波處理,最后應(yīng)用非極大值抑制和雙閾值檢測(cè)邊緣連接提取圖像的二值化邊緣.實(shí)驗(yàn)結(jié)果顯示,該算法邊緣提取效果較好,達(dá)到
2011-02-14 15:35:2229 紅外圖像受噪聲污染嚴(yán)重,邊緣模糊,應(yīng)用傳統(tǒng)的邊緣提取算法提取邊緣較為困難。本文根據(jù)人眼微動(dòng)視覺(jué)成像的基本原理,結(jié)合紅外圖像的特點(diǎn)進(jìn)行了邊緣提取的研究。
2011-07-09 17:15:161540 通過(guò)詳細(xì)分析電容式觸摸屏的結(jié)構(gòu)以及電極設(shè)計(jì),為電容式觸摸屏提供了一種單層膜ITO實(shí)現(xiàn)多點(diǎn)觸摸的設(shè)計(jì)方案。實(shí)際驗(yàn)證結(jié)果表明,在單手指觸摸和兩根手指觸摸的情況下,所設(shè)計(jì)的
2011-08-20 16:33:266314 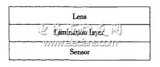
提出了一種新的橫向和縱向模板算法,通過(guò)仿真實(shí)驗(yàn),獲得了優(yōu)于梯度算子提取圖像邊緣的結(jié)果。并對(duì)以上算法進(jìn)行改進(jìn),在邊緣圖像信息衰減微小的情況下,有效地改善了圖像邊緣的提取時(shí)
2011-11-11 14:26:4919 提出基于Canny算子并結(jié)合圖像增強(qiáng)和數(shù)學(xué)形態(tài)學(xué)的綜合邊緣提取算法。該算法首先對(duì)原始圖像進(jìn)行增強(qiáng),以便于計(jì)算機(jī)的分析;然后利用Canny算子對(duì)CT圖片進(jìn)行邊緣提取,該算子具有非極
2012-01-13 09:45:5222 提出一種基于 STM32F103 單片機(jī)的用于電動(dòng)車電池能量管理系統(tǒng)(EMS)的液晶顯示 觸摸屏的設(shè)計(jì)方案,該方案以 STM32F103 作為核心控制器。
2015-11-09 16:29:384 本文檔內(nèi)容介紹了基于深度圖像重建Matlab代碼,供網(wǎng)友參考。
2017-09-15 10:03:3321 1 引言 隨著航空航天技術(shù)的發(fā)展,圖像無(wú)線傳輸技術(shù)日趨成熟。而嵌入式圖像無(wú)線傳輸技術(shù)以其安裝方便、靈活、適合廣泛普及等優(yōu)點(diǎn)在廣大領(lǐng)域備受關(guān)注。本文介紹一種基于DSP的無(wú)線圖像傳輸系統(tǒng)的設(shè)計(jì)方案與實(shí)現(xiàn)
2017-10-24 10:44:1911 圖像邊緣提取是圖像處理及計(jì)算機(jī)視覺(jué)中的最基本問(wèn)題,邊緣檢測(cè)的結(jié)果直接影響后續(xù)處理的精度與結(jié)果,其關(guān)鍵是在去除圖像噪聲和銳化圖像邊緣的同時(shí),保持并增強(qiáng)圖像的重要特征。傳統(tǒng)圖像邊緣檢測(cè)方法如微分算子法
2017-10-30 11:11:111 基于DSP的無(wú)線圖像傳輸系統(tǒng)的設(shè)計(jì)方案與實(shí)現(xiàn)方法。 2 系統(tǒng)總體設(shè)計(jì)方案 圖1為該系統(tǒng)設(shè)計(jì)框圖。該系統(tǒng)分為圖像采集、圖像數(shù)據(jù)處理及無(wú)線通信3個(gè)模塊。圖像采集完成圖像數(shù)據(jù)的采集;圖像處理實(shí)現(xiàn)圖像數(shù)據(jù)的壓縮及相關(guān)處理:無(wú)線通信傳輸壓縮
2017-11-01 10:12:3510 相機(jī)采集的。為了提高平面提取的速度,我們首先計(jì)算深度圖像中點(diǎn)的法向量,通過(guò)法向量來(lái)判斷這些點(diǎn)是否在一個(gè)平面上。運(yùn)用求點(diǎn)的法向量可以同時(shí)檢測(cè)多個(gè)復(fù)雜的平面,而且實(shí)驗(yàn)結(jié)果顯示該方法比傳統(tǒng)的3D Hough Transform以及RANSAC方法要快。此種方
2017-11-16 10:10:124 圖像邊緣是圖像分析和識(shí)別的基礎(chǔ),圖像邊緣信息的準(zhǔn)確性和完整性對(duì)后續(xù)圖像分析和識(shí)別有重要影響。為實(shí)現(xiàn)圖像邊緣有效提取,提出一種利用數(shù)據(jù)場(chǎng)和圖像歐氏距離的圖像邊緣提取方法。首先,該方法利用數(shù)據(jù)場(chǎng)理論構(gòu)建
2017-11-24 15:03:051 深度圖像受其測(cè)距原理所限,存在邊緣不匹配、無(wú)效像素、噪聲等問(wèn)題,提出一種基于改進(jìn)的各向異性擴(kuò)散算法的深度圖像增強(qiáng)方法。首先,校正深度圖像和彩色圖像的位置關(guān)系,并根據(jù)時(shí)間連續(xù)性選擇多幀圖像,進(jìn)行多幀
2017-11-25 11:08:469 處理。隨著圖像技術(shù)與硬件的發(fā)展,利用微軟Kinect或華碩Xtion等設(shè)備,學(xué)者可以實(shí)時(shí)獲取人體的深度圖像信息。與傳統(tǒng)的圖像相比,深度圖像不受光照影響,能夠提供三維空間信息。利用深度圖像,學(xué)者們對(duì)行為識(shí)別做了許多研究,本文
2017-12-09 11:47:510 針對(duì)復(fù)雜環(huán)境下的深度圖像手勢(shì)特征提取信息冗余量大、編碼不穩(wěn)定等問(wèn)題,提出了一種改進(jìn)的基于曲率局部二值模式( LBP)的深度圖像手勢(shì)特征提取算法。該算法首先通過(guò)坐標(biāo)轉(zhuǎn)換將分割出的手勢(shì)深度數(shù)據(jù)轉(zhuǎn)換為點(diǎn)云
2017-12-11 16:21:064 圖像分割的研究多年來(lái)一直受到人們的高度重視,至今提出了各種類型的分割算法。Pal把圖像分割算法分成了6類:閾值分割,像素分割、深度圖像分割、彩色圖像分割,邊緣檢測(cè)和基于模糊集的方法。但是,該方法中
2017-12-19 09:29:3811736 
針對(duì)分布式多視點(diǎn)加深度格式( DMVD)的視頻編碼中深度圖視頻解碼質(zhì)量問(wèn)題,提出一種結(jié)合予帶層及子帶系數(shù)的小波域分布式深度視頻非均勻量化方案,通過(guò)給邊緣分配更多比特來(lái)提升深度圖的邊緣質(zhì)量。結(jié)合深度圖
2017-12-20 16:34:001 針對(duì)傳統(tǒng)的彩色視頻中動(dòng)作識(shí)別算法成本高,且二維信息不足導(dǎo)致動(dòng)作識(shí)別效果不佳的問(wèn)題,提出一種新的基于三維深度圖像序列的動(dòng)作識(shí)別方法。該算法在時(shí)間維度上提出了時(shí)間深度模型(TDM)來(lái)描述動(dòng)作。在三個(gè)正交
2017-12-25 14:34:521 針對(duì)應(yīng)用在機(jī)器人三維(3D)場(chǎng)景感知測(cè)量中,Kinect深度圖的聯(lián)合雙邊濾波(JBF)存在降低原始場(chǎng)景深度信息精確度的制約性問(wèn)題,提出一種新的預(yù)處理算法。首先,通過(guò)構(gòu)建深度圖的測(cè)量和采樣模型,得到
2017-12-25 16:58:020 針對(duì)立體視覺(jué)深度圖特征提取精確度低、復(fù)雜度高的問(wèn)題,提出了一種基于主成分分析方向深度梯度直方圖( PCA-HODG)的特征提取算法。首先,對(duì)雙目立體視覺(jué)圖像進(jìn)行視差計(jì)算和深度圖提取,獲取高質(zhì)量深度圖
2017-12-26 14:32:070 提出一種基于局部姿態(tài)先驗(yàn)的從深度圖像中實(shí)時(shí)在線捕獲3D人體運(yùn)動(dòng)的方法,關(guān)鍵思路是根據(jù)從捕獲的深度圖像中自動(dòng)提取具有語(yǔ)義信息的虛擬稀疏3D標(biāo)記點(diǎn),從事先建立的異構(gòu)3D人體姿態(tài)數(shù)據(jù)庫(kù)中快速檢索K個(gè)姿態(tài)
2018-01-03 14:33:440 針對(duì)邊緣檢測(cè)中存在的噪聲敏感性問(wèn)題。本文根據(jù)Mallat快速小波變換算法的思想,提出用高斯函數(shù)和其一階導(dǎo)數(shù)分別作為低通和高通濾波器對(duì)圖像進(jìn)行多尺度分析,通過(guò)非下采樣提取不同尺度上的系數(shù),然后利用尺度
2018-02-28 15:46:471 超市儲(chǔ)物柜電子系統(tǒng)的設(shè)計(jì)方案
2018-05-09 10:40:135 NU3000是一種多核處理器,它能夠從立體圖像中提取實(shí)時(shí)深度,以及處理深度圖像(連同其他傳感器)來(lái)融合出實(shí)時(shí)定位和地圖創(chuàng)建解決方案。
2018-07-02 11:50:001807 該深度圖像傳感器可在黑暗中拍攝250米遠(yuǎn),10厘米物體的圖像。為了測(cè)距,該傳感器采用了ToF(飛行時(shí)間)法,可發(fā)射紅外光并基于反射光返回時(shí)間計(jì)算物體距離。
2018-08-20 10:45:045542 本文檔的主要內(nèi)容詳細(xì)介紹的是圖像邊緣檢測(cè)和特征提取實(shí)驗(yàn)報(bào)告的詳細(xì)資料說(shuō)明目的包括了:1.了解圖像邊緣檢測(cè)的原理。自己實(shí)現(xiàn)邊緣檢測(cè)算法,對(duì)特定的幾幅圖像進(jìn)行邊緣檢測(cè),并達(dá)到較好的效果。2.了解特征提取的原理,并對(duì)圖像中存在的一些特征進(jìn)行特征提取。
2019-04-19 08:00:002 多孔卷積結(jié)構(gòu),將原始圖像中的空間信息與提取到的底層圖像特征相互融合,得到初始深度圖;最后,將初始深度圖送入條件隨機(jī)場(chǎng)(CRF),聯(lián)合圖像的像素空間位置、灰度及其梯度信息對(duì)所得深度圖進(jìn)行優(yōu)化處理,得到最終深度圖。在客觀數(shù)
2019-10-30 14:58:3610 (2)亞像素細(xì)分算法定位 經(jīng)過(guò)擴(kuò)展方向模板的Sobel細(xì)化算子后,提取接近單像素的邊緣,在其梯度方向上用亞像素細(xì)分算法對(duì)圖像邊緣進(jìn)一步定位。
2020-08-13 16:04:351439 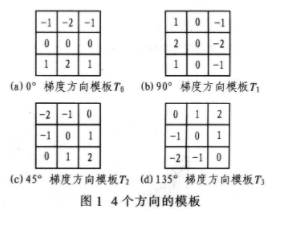
多孔卷積結(jié)構(gòu),將原始圖像中的空間信息與提取到的底層圖像特征相互融合,得到初始深度圖;最后,將初始深度圖送入條件隨機(jī)場(chǎng)(CRF),聯(lián)合圖像的像素空間位置、灰度及其梯度信息對(duì)所得深度圖進(jìn)行優(yōu)化處理,得到最終深度圖。在客觀數(shù)
2020-09-29 16:20:005 今天,我們將深入探討深度圖像修復(fù)的一個(gè)突破,上下文注意力。通過(guò)使用上下文注意力,我們可以有效地從遙遠(yuǎn)的空間位置借用信息來(lái)重建局部缺失的像素。這個(gè)想法實(shí)際上或多或少和上一篇的復(fù)制-粘貼是一樣的。
2021-04-07 19:01:043547 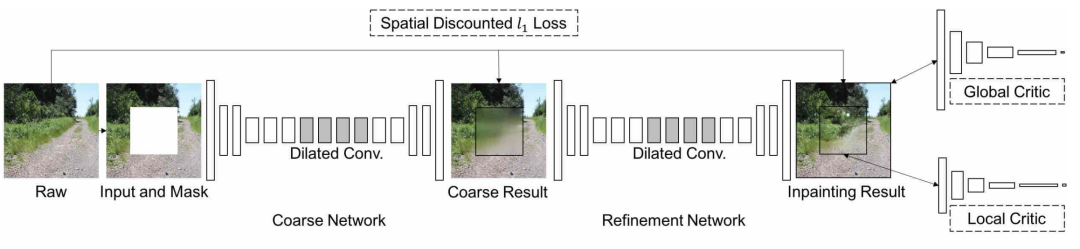
為實(shí)現(xiàn)復(fù)雜背景圖像中髙精度邊緣的準(zhǔn)確提取,提出一種改進(jìn)的單像素邊緣提取算法。在改進(jìn)的全卷積神經(jīng)網(wǎng)絡(luò)中,通過(guò)添加輔助輸出層與采取多尺度輸入的方式初步提取圖像多像素邊緣,并利用分水嶺算法對(duì)多像素邊緣進(jìn)行
2021-05-27 14:30:005 廣角相機(jī)以小、輕、經(jīng)濟(jì)高效的外形提供豐富的信息,是移動(dòng)機(jī)器人的獨(dú)選。內(nèi)部和外部的精確標(biāo)定是使用廣角鏡頭邊緣進(jìn)行深度感知和里程測(cè)量的關(guān)鍵先決條件。
2022-11-14 16:11:202188 TYPE-C 轉(zhuǎn) LVDS 芯片及設(shè)計(jì)方案
2022-11-29 11:07:272055 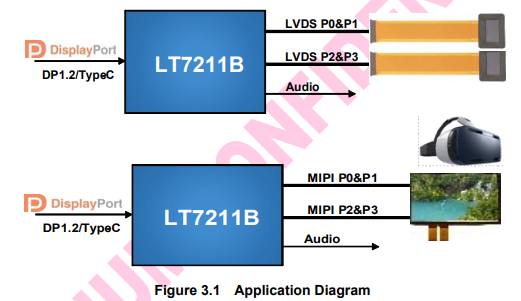
今天我們將一起探究如何使用OpenCV和Python從圖像中提取感興趣區(qū)域(ROI)。
在之間的文章中,我們完成了圖像邊緣提取,例如從臺(tái)球桌中提取桌邊。使用了簡(jiǎn)單的OpenCV函數(shù)即可完成
2023-02-07 14:42:002556 Sobel算子是一種基于圖像梯度的邊緣檢測(cè)算法,可以在x方向和y方向上計(jì)算圖像的梯度,然后將兩個(gè)梯度值合并成一個(gè)邊緣強(qiáng)度值。
2023-02-24 17:56:492826 現(xiàn)在 CNN 模型這種天然的特征描述機(jī)制,給圖像預(yù)處理提供了不錯(cuò)的工具,它能將圖像處理和視覺(jué)預(yù)處理合二為一。
2023-04-14 10:30:201991 ? ? 本文提出了一種生產(chǎn)化的端到端立體深度感知系統(tǒng)設(shè)計(jì),可以完成預(yù)處理、在線立體校正和立體深度估計(jì),并支持糾偏失敗后的單目深度估計(jì)備選方案。同時(shí),該深度感知系統(tǒng)的輸出應(yīng)用于一種基于智能眼鏡拍攝
2023-05-26 16:12:001354 
電子發(fā)燒友網(wǎng)站提供《邊緣AI套件上的立體視覺(jué)深度感知.zip》資料免費(fèi)下載
2023-06-12 14:36:400 ? 今天介紹一下深度圖像的獲取方法主要有哪些,以及這些方法會(huì)導(dǎo)致深度圖像中存在什么樣的問(wèn)題。 在計(jì)算機(jī)視覺(jué)系統(tǒng)中,三維場(chǎng)景信息為圖像分割、目標(biāo)檢測(cè)、物體跟蹤等各類計(jì)算機(jī)視覺(jué)應(yīng)用提供了更多的可能性,而
2023-06-25 16:26:362062 
1500V儲(chǔ)能系統(tǒng)設(shè)計(jì)方案,儲(chǔ)能系統(tǒng)劃分為10個(gè)2.5MW/5MWh儲(chǔ)能單元。采用了天合儲(chǔ)能的非步入式電池艙設(shè)計(jì)方案,安裝維護(hù)邊界,配上“一簇一散熱”的精細(xì)化熱管理,可將簇內(nèi)溫差控制在8℃以內(nèi),天合儲(chǔ)能致力于用高可靠、低成本、高安全的產(chǎn)品標(biāo)簽贏得
2023-10-17 09:58:561823 針對(duì)儲(chǔ)能系統(tǒng)安全監(jiān)測(cè)管理,可以采用佰馬邊緣智能網(wǎng)關(guān)方案,依托強(qiáng)大的數(shù)據(jù)采集能力、邊緣計(jì)算能力、設(shè)備控制能力、聯(lián)動(dòng)響應(yīng)能力,實(shí)現(xiàn)對(duì)儲(chǔ)能系統(tǒng)的精細(xì)化、智能化安全管控,保障系統(tǒng)整體安全穩(wěn)定。
2023-10-25 18:00:141106 
使用。本文旨在詳細(xì)闡述一個(gè)光伏儲(chǔ)能系統(tǒng)的設(shè)計(jì)方案,包括系統(tǒng)概述、系統(tǒng)組成、設(shè)計(jì)原則、關(guān)鍵技術(shù)、設(shè)計(jì)步驟和預(yù)期效果等方面。
2024-05-17 16:36:183843 圖像邊緣檢測(cè)系統(tǒng)的設(shè)計(jì)流程是一個(gè)涉及多個(gè)步驟的復(fù)雜過(guò)程,它旨在從圖像中提取出重要的結(jié)構(gòu)信息,如邊界、輪廓等。這些邊緣信息對(duì)于圖像分析、機(jī)器視覺(jué)、圖像壓縮等領(lǐng)域至關(guān)重要。以下是一個(gè)詳細(xì)的圖像邊緣檢測(cè)系統(tǒng)設(shè)計(jì)流程,包括關(guān)鍵步驟、技術(shù)細(xì)節(jié)和可能的挑戰(zhàn)。
2024-07-17 16:39:361070
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論