用ARM7和UC/OS-II設(shè)計(jì)的信號(hào)采集系統(tǒng)
概述:介紹了一種用ARM7+μC/OSII設(shè)計(jì)的數(shù)據(jù)采集系統(tǒng)。給出了
2010-04-16 14:06:27 1034
1034 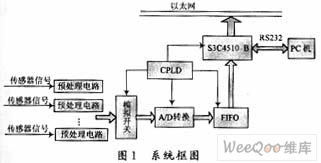
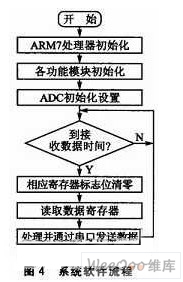
本文將介紹實(shí)時(shí)獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計(jì)的參數(shù),以及通過(guò)輪詢檢查中斷信號(hào)來(lái)不斷讀取加速度數(shù)據(jù)。
2023-12-18 10:46:162692 
本文將介紹實(shí)時(shí)獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計(jì)的參數(shù),以及通過(guò)輪詢檢查中斷信號(hào)來(lái)不斷讀取加速度數(shù)據(jù)。
2024-05-17 14:42:371836 
加速度計(jì)2422H-025加速度計(jì)2422H-050加速度計(jì)2422H-100加速度計(jì)2422H-200加速度計(jì)2422H-400加速度計(jì)3330G-LOGGER數(shù)據(jù)采集系統(tǒng)3340G-LOGGER
2021-05-28 15:04:20
計(jì)2422H-200加速度計(jì)2422H-400加速度計(jì)3330G-LOGGER數(shù)據(jù)采集系統(tǒng)3340G-LOGGER數(shù)據(jù)采集系統(tǒng)EB-L模擬模型EB-J模擬模型2230-BLK正交安裝塊2232-BLK
2021-05-28 14:44:38
請(qǐng)問(wèn)arm7串口速度最快多少?
2013-05-03 09:18:11
和數(shù)據(jù)采集器。在選擇加速度計(jì)時(shí),一定要考慮它的整個(gè)測(cè)量系統(tǒng),確保它的完整性.1、ICP [IEPE]加速度傳感器應(yīng)用測(cè)量系統(tǒng):ICP 傳感器是內(nèi)裝微型 IC 放大器的壓電加速度傳感器,它將傳統(tǒng)的壓電
2018-04-28 10:04:16
請(qǐng)大俠幫幫忙本人正在接觸labview數(shù)據(jù)采集的東西!現(xiàn)在就是想用加速度傳感器測(cè)振動(dòng)信號(hào),數(shù)據(jù)采集卡是PCI-4472的。不知如何實(shí)現(xiàn)振動(dòng)信號(hào)的采集。要求在控制面板中有采樣頻率的選擇以及采樣時(shí)間長(zhǎng)短的控制。還能實(shí)現(xiàn)數(shù)據(jù)的存儲(chǔ)!不知那為答謝有好的想法或者程序!望不吝賜教!小弟先謝謝了哈!
2011-03-22 23:08:52
我現(xiàn)在采集到的ADIS16477-2的imu數(shù)據(jù),測(cè)試陀螺、加速度計(jì)的漂移非常大,IMU是放在臺(tái)面上鏡子不動(dòng)的。
下圖第一排陀螺x、y、z的原始數(shù)據(jù),第二排分別是5s鐘平滑后的數(shù)據(jù)。
下圖第一排
2023-12-28 07:25:03
有個(gè)別芯片,在平放狀態(tài)下,常溫時(shí)x,y,z軸的加速度數(shù)據(jù)都是正常。但是當(dāng)溫度較低時(shí),例如低于0度時(shí),x,y,軸的數(shù)據(jù)開(kāi)始跳變成一個(gè)很大的值(此時(shí)依舊是平放),當(dāng)把溫度升高,又恢復(fù)正常了,經(jīng)過(guò)多次循環(huán)
2023-12-27 06:34:40
我們?cè)谧鲆豢钫駝?dòng)數(shù)據(jù)采集的產(chǎn)品,用ADXL345三軸加速度傳感器。在數(shù)據(jù)采集中發(fā)現(xiàn)Z軸(也就是垂直方向)本來(lái)就有1g的重力加速度,這個(gè)時(shí)候就需要對(duì)1g做數(shù)據(jù)處理了,我們遇到的問(wèn)題是:1、如果加速度
2019-03-05 15:15:58
用IIC驅(qū)動(dòng)ADXL345,低電平中斷輸出,13位全分辨率,輸出右對(duì)齊,16g量程,靜止的時(shí)候測(cè)量數(shù)據(jù)是準(zhǔn)確的,放到振動(dòng)臺(tái)上測(cè)量時(shí)輸出的加速度數(shù)據(jù)不怎么變化,是怎么回事呀。
2023-12-28 07:18:02
我正在嘗試轉(zhuǎn)換來(lái)自 AIS1120SX/AIS2120SX 的 14 位加速度數(shù)據(jù)。我使用加速命令成功地從零件中檢索數(shù)據(jù),并且能夠查看返回的值,但我不明白如何將該值轉(zhuǎn)換為 G。文檔中有一個(gè)表格(表
2023-01-30 08:09:14
加速度,經(jīng)過(guò)內(nèi)部實(shí)時(shí)FFT算法處理后直接輸出振幅和頻率來(lái)判斷),而不需要昂貴的且不適應(yīng)現(xiàn)場(chǎng)工作環(huán)境的數(shù)據(jù)采集設(shè)備與分析軟件,是一款高性價(jià)比的振動(dòng)測(cè)量產(chǎn)品。`
2016-07-05 17:09:23
···100mm/s(可選)? 信號(hào)輸出:4~20mA 輸出 與 振動(dòng)速度成正比? 各種安裝:螺紋打孔、磁鐵吸附、強(qiáng)性膠水等? 密封達(dá)到IP65? 適用于風(fēng)機(jī),泵,電動(dòng)機(jī),齒輪箱等? 可以連接到PLC 、DCS等數(shù)據(jù)采集
2020-08-14 16:48:41
輸入速度主要性能性比價(jià)高用于PLC/DCS系統(tǒng)數(shù)據(jù)采集可定制的功能應(yīng)用領(lǐng)域大型機(jī)械,紙漿和造紙,采礦,金屬,航空航天,汽車,水,制藥,風(fēng)能,軸承,發(fā)動(dòng)機(jī),壓縮機(jī)等等風(fēng)能,電動(dòng)機(jī),泵,壓縮機(jī),離心機(jī), 輸送機(jī)
2020-10-27 11:25:56
先進(jìn)的4-20mA、HART協(xié)議、開(kāi)關(guān)量PNP 振動(dòng)變送器或回路供電的傳感器,專為與最新的PLC(可編程邏輯控制器),BMS(樓宇管理系統(tǒng))或SCADA(監(jiān)控和數(shù)據(jù)采集)技術(shù)一起使用而設(shè)計(jì),可為情況提供
2020-08-14 16:32:20
,要做一個(gè)30°的滑坡上小車(75kg)的實(shí)驗(yàn),滑坡末端有擋板,小車滑下的加速度和碰到擋板所受的力,這兩個(gè)數(shù)據(jù)的采集和分析。求助各位大神!怎么編輯和設(shè)置NI-Max,以及Labview-vi程序的編輯。要求采集小車滑下一次的數(shù)據(jù)。
2014-06-03 10:11:05
加速度傳感器一直是加速度測(cè)試中的重要元件。隨著微加速度計(jì)的應(yīng)用越來(lái)越廣泛,對(duì)于微加速度計(jì)的數(shù)據(jù)信號(hào)采集和存儲(chǔ)變得極為重要。傳統(tǒng)的數(shù)據(jù)采集方法多數(shù)是采用單片機(jī)完成的,編程簡(jiǎn)單、控制靈活,但控制周期長(zhǎng)、速度慢,特別是對(duì)高速轉(zhuǎn)換的數(shù)據(jù)來(lái)說(shuō),單片機(jī)的速度極大地限制了數(shù)據(jù)傳輸速度。
2020-03-05 06:03:09
STM32 VS ARM7 的速度,是否STM32快過(guò)ARM7
2019-07-23 23:06:24
最近在做了一款震動(dòng)監(jiān)測(cè)的產(chǎn)品,選用了adxl362作為加速度傳感器。調(diào)試的時(shí)候發(fā)現(xiàn) 一開(kāi)始數(shù)據(jù)都正常,然后一段時(shí)間后(幾天)發(fā)現(xiàn)采集的加速度值不變了。出現(xiàn)這種問(wèn)題后無(wú)法恢復(fù)正常,只能更換362芯片。可以確認(rèn)362芯片損壞。想請(qǐng)教下大家可能是什么原因引起的?有什么解決辦法?
2023-12-29 07:07:40
adxl362無(wú)法獲取加速度數(shù)據(jù)
2018-09-11 07:45:22
一、傳感器采集到上位機(jī)的數(shù)據(jù)是加速度,該怎么樣轉(zhuǎn)換成速度和位移的呢?一次積分和二次積分,具體怎么操作實(shí)現(xiàn)呢??二、采集到的數(shù)據(jù)的是只有加速度的數(shù)值,如果要進(jìn)行頻譜分析等分析,是直接把這個(gè)加速度的數(shù)組
2014-07-29 14:30:23
求助各位大神,請(qǐng)問(wèn)我有一組采集到的加速度數(shù)據(jù),存在excel表里面,我現(xiàn)在想利用labview讀取這組數(shù)據(jù)并且對(duì)這組數(shù)據(jù)進(jìn)行積分,得到一組加速度數(shù)據(jù),求問(wèn)我如何讀取這組數(shù)據(jù)并且進(jìn)行積分操作呢????萬(wàn)分感謝!!!!!!
2016-12-06 09:41:38
本來(lái)菜鳥一枚,最近基于labview用多通道加速度傳感器對(duì)車輛振動(dòng)數(shù)據(jù)采集,數(shù)據(jù)采集前屏幕上顯示一直有微小加速度波動(dòng),不曉得那些波動(dòng)是正常的不或者怎么調(diào)整測(cè)量前的參數(shù)及設(shè)置,去除那些波動(dòng),求大神指導(dǎo)
2013-05-22 17:06:54
傳感器采集三軸加速度數(shù)據(jù)(采集見(jiàn)我前一篇文章),通過(guò)數(shù)據(jù)計(jì)算物體傾斜角度的算法及代碼實(shí)現(xiàn),見(jiàn)附件
2016-09-26 20:39:49
請(qǐng)問(wèn)有誰(shuí)可以給一個(gè)可以采集多個(gè)加速度信號(hào)的數(shù)據(jù)采集例子程序給我嗎,萬(wàn)分感謝
2015-03-31 17:02:54
請(qǐng)問(wèn)有誰(shuí)可以給一個(gè)可以采集多個(gè)加速度信號(hào)的數(shù)據(jù)采集例子程序給我嗎,萬(wàn)分感謝
2015-03-31 17:03:31
的振動(dòng)信號(hào)?我可以使用電纜將此加速度計(jì)連接到我們的數(shù)據(jù)采集系統(tǒng)嗎?還是無(wú)線工作?這個(gè)加速度計(jì)是否有內(nèi)存來(lái)保存振動(dòng)數(shù)據(jù),如果有,我該如何傳輸這些數(shù)據(jù)?
2023-01-13 07:47:52
如題現(xiàn)在有加速度傳感和數(shù)據(jù)采集卡,就想采集振動(dòng)體的振動(dòng)頻率
2014-07-23 17:49:45
接口,它使電路工作在更加平穩(wěn)、簡(jiǎn)潔而易丁控制,同時(shí)也提高了ARM的工作效率。為了提高通信速度,這里采用通用申行總線(USB)技術(shù)米與PC進(jìn)行通信。ARM是用來(lái)控制主處理器的數(shù)據(jù)采集,數(shù)據(jù)的計(jì)算和數(shù)據(jù)傳輸。結(jié)果證明,整個(gè)系統(tǒng)能高效運(yùn)作。該系統(tǒng)可應(yīng)用于高速數(shù)據(jù)采集及多路模擬信號(hào)的工作環(huán)境下。
2023-09-26 07:41:28
。綜合單片機(jī)與FPGA的優(yōu)點(diǎn),這里介紹一種基于ARM和FPGA的微加速度計(jì)數(shù)據(jù)采集存儲(chǔ)系統(tǒng),結(jié)合MXR6150G/M加速度計(jì)傳感器和TLC0820-A/D轉(zhuǎn)換芯片,提供了一種配置靈活、通用性強(qiáng)的數(shù)據(jù)采集
2020-11-25 06:17:24
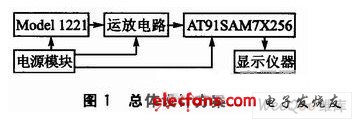
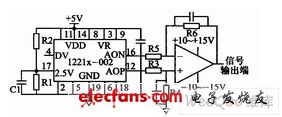
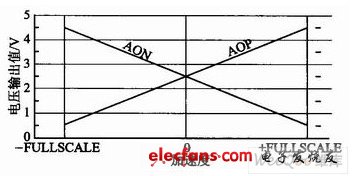
下的輸出電壓。因此可以測(cè)得加速度傳感器在各個(gè)加速度值下的輸出電壓值。 2 加速度傳感器性能試臺(tái)的系統(tǒng)結(jié)構(gòu) 本加速度傳感器性能自動(dòng)測(cè)試臺(tái)采用NI LabVIEW為開(kāi)發(fā)平臺(tái),在數(shù)據(jù)采集上采用射頻技術(shù)
2018-11-01 15:16:47
麻煩咨詢下,下述問(wèn)題如何解決:cc2650 STK測(cè)試加速度數(shù)據(jù)上傳至https://quickstart.internetofthings.ibmcloud.com時(shí),手機(jī)(安卓系統(tǒng))APP
2019-10-16 10:33:24
構(gòu)建加速度測(cè)量無(wú)線傳輸系統(tǒng),避免因采用傳輸導(dǎo)線所帶來(lái)的不利影響和使用上的不方便。該系統(tǒng)的特點(diǎn)是集電源、加速度傳感器、微控器、射頻收發(fā)器于一體,體積小、功耗低,能夠?qū)崿F(xiàn)對(duì)運(yùn)動(dòng)物體三維方向上加速度的測(cè)量。所設(shè)計(jì)的系統(tǒng)裝置可以非常方便地固定于運(yùn)動(dòng)物體上,尤其適合近距復(fù)雜環(huán)境中對(duì)運(yùn)動(dòng)物體加速度的測(cè)量。
2019-08-06 06:13:44
壓電式加速度傳感器把采集到的 加速度信號(hào)轉(zhuǎn)變?yōu)?位移信號(hào)……硬件 ---壓電式加速度傳感器、電荷放大器、 NI數(shù)據(jù)采集卡、內(nèi)有l(wèi)abview的電腦…求大神給個(gè)程序
2016-10-25 17:33:38
或數(shù)據(jù)采集系統(tǒng)時(shí),靈敏度數(shù)值是使用最頻繁的。信號(hào)調(diào)理器或數(shù)據(jù)采集使用這個(gè)數(shù)值來(lái)處理及解釋加速度計(jì)的輸出信號(hào)。頻率響應(yīng)同靈敏度類似,頻率響應(yīng)也是告訴用戶加速度計(jì)的“比例因子”,不過(guò)是在變化的頻率
2019-01-21 09:36:59
我是剛開(kāi)始選型,需要用到加速度傳感器和位移傳感器,現(xiàn)在就是有個(gè)疑問(wèn),兩個(gè)傳感器可不可以共用一塊數(shù)據(jù)采集板卡,我想選用NI的模擬輸入模塊。希望高手前輩能來(lái)解答。
2016-10-31 20:23:39
請(qǐng)問(wèn)ADXL001能采集靜止加速度嗎?比如重力加速度,在信號(hào)輸出的時(shí)候重力加速度有沒(méi)有影響?
2024-01-01 07:15:03
(angle[2])));但是這樣計(jì)算出來(lái)的值不對(duì)。。。。很苦惱,希望大家?guī)蛶兔Α_@是MPU6050采集到的數(shù)據(jù)。要怎么計(jì)算才能算出合加速度呢?
2019-04-19 05:07:12
請(qǐng)問(wèn)有誰(shuí)可以給一個(gè)可以采集多個(gè)加速度信號(hào)的數(shù)據(jù)采集例子程序給我嗎,萬(wàn)分感謝
2015-03-31 17:02:04
轉(zhuǎn)軸角加速度是旋轉(zhuǎn)機(jī)構(gòu)轉(zhuǎn)動(dòng)時(shí)的一項(xiàng)重要參數(shù),旋轉(zhuǎn)體的角加速度在實(shí)踐中有著廣泛和重要的應(yīng)用。對(duì)角加速度的測(cè)量原理方法進(jìn)行了研究,尋求一種高精度連續(xù)測(cè)量角加速度可行的方法。設(shè)計(jì)了基于AT09S8515
2011-03-04 12:17:42
輸出是xyz三個(gè)模擬電壓量的加速度傳感器能跟USB6008數(shù)據(jù)采集卡連接嗎?怎么連?
2016-05-19 13:25:37
采用NI4497采集卡收集加速度數(shù)據(jù)、現(xiàn)在需要一個(gè)LABVIEW程序。希望有高手給出程序、如果程序可以使用,可以給與一定的現(xiàn)金答謝(不是太多)。謝謝
2018-04-18 15:13:40
數(shù)據(jù)采集向高精度和高速度兩個(gè)方向發(fā)展。高精度數(shù)據(jù)采集依賴于A/D器件的精度,高速度數(shù)據(jù)采集不僅依賴于A/D器件的速度還依賴于數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)。高速數(shù)據(jù)采集按是否可連續(xù)采集而可以分為兩類。
2019-10-22 06:32:43
為提高現(xiàn)有的加速度傳感器的靈敏度,采用專用電荷放大器,同已有的數(shù)據(jù)采集器和測(cè)量分析軟件集成,組成了便攜式“微弱振動(dòng)信號(hào)加速度測(cè)量系統(tǒng)”。實(shí)踐表明,本系統(tǒng)能對(duì)微弱的振
2009-06-30 09:57:14 16
16 為了實(shí)現(xiàn)工業(yè)廢水實(shí)時(shí)監(jiān)測(cè)任務(wù),本文給出了一種基于ARM7處理器LPC2138和嵌入式時(shí)實(shí)操作系統(tǒng)uc/OS-II,開(kāi)發(fā)出一套工業(yè)廢水指標(biāo)多點(diǎn)數(shù)據(jù)采集系統(tǒng)。實(shí)現(xiàn)了對(duì)COD、TOC、流量、PH值
2009-07-30 11:23:1430 本文介紹了以ARM7 為控制單元,使用CMOS 圖像傳感器進(jìn)行圖像數(shù)據(jù)采集的嵌入式監(jiān)控系統(tǒng);并在介紹系統(tǒng)組成原理的基礎(chǔ)上討論了SCCB 總線配置的方法和圖像采集部分的結(jié)構(gòu),最后
2009-08-29 11:56:1230 為滿足光纖傳感地震加速度計(jì)對(duì)實(shí)時(shí)性堯高精度以及網(wǎng)絡(luò)化的要求袁提出了基于ARM和DSP雙核微處理器的嵌入式系統(tǒng)設(shè)計(jì)方案袁對(duì)3伊3 耦合器輸出的相位已調(diào)加速度信號(hào)進(jìn)行解調(diào)堯頻
2009-11-14 10:34:3915 LPC2103 為飛利浦公司的一款ARM7 系列微控制器,主要用于工業(yè)控制、醫(yī)療系統(tǒng)、訪問(wèn)控制、POS 機(jī)、通信網(wǎng)關(guān)等領(lǐng)域。本文使用LPC2103 實(shí)現(xiàn)對(duì)ADXL202 加速度數(shù)據(jù)的采集與處理。
2009-11-26 14:56:3735 介紹了一種用ARM7+~C/OS—II設(shè)計(jì)的數(shù)據(jù)采集系統(tǒng)。給出了系統(tǒng)原理框圖,實(shí)現(xiàn)了將嵌入式操作系統(tǒng)植入該系統(tǒng)中,列出了軟件設(shè)計(jì)的要點(diǎn)。
2009-12-01 14:00:5917 本文主要介紹了基于ARM 和GPS 的數(shù)據(jù)采集記錄儀中的數(shù)據(jù)采集模塊的設(shè)計(jì)與實(shí)現(xiàn)。該數(shù)據(jù)采集記錄儀以32 位ARM7 微處理器LPC2220 為硬件平臺(tái),以u(píng)C/OS-II 嵌入式實(shí)時(shí)操作系統(tǒng)為軟件環(huán)
2010-01-06 15:45:5843 本文提出了一種基于無(wú)線收發(fā)芯片CC1010 的步態(tài)加速度信號(hào)無(wú)線采集的有效實(shí)現(xiàn)方法。該方法采用三軸加速度傳感器MMA7260 測(cè)量步態(tài)的加速度信號(hào),并用Chipcon 公司的內(nèi)嵌8051 的無(wú)線
2010-01-16 15:16:3223 溫度數(shù)據(jù)采集系統(tǒng)
2008-02-27 22:52:411454 
步態(tài)加速度信號(hào)的無(wú)線采集系統(tǒng)設(shè)計(jì)
為實(shí)現(xiàn)步態(tài)加速度信號(hào)的無(wú)線采集,提出一種基于內(nèi)嵌8051的無(wú)線收發(fā)芯片CC1010的有效方法。簡(jiǎn)要介紹步態(tài)加速
2009-03-29 15:14:25896 
基于ARM7的LCD顯示電壓示波系統(tǒng)的設(shè)計(jì)
本設(shè)計(jì)以ARM7微處理器為核心,采用ARM7中的高速A/D為測(cè)壓?jiǎn)卧?提高了數(shù)據(jù)傳輸?shù)目煽啃?數(shù)據(jù)結(jié)果通過(guò)LCD實(shí)時(shí)顯
2009-09-03 11:22:331144 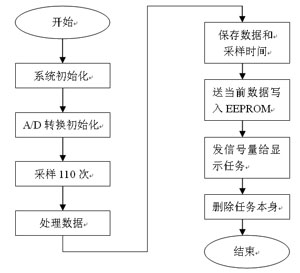
基于ARM的藍(lán)牙實(shí)時(shí)數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
摘要:本文提出了一種基于ARM的藍(lán)牙無(wú)線數(shù)據(jù)采集系統(tǒng)。結(jié)合嵌入式技術(shù)與藍(lán)牙技術(shù)的優(yōu)勢(shì),解決了傳統(tǒng)工業(yè)現(xiàn)場(chǎng)數(shù)據(jù)采集系統(tǒng)中
2010-02-02 11:27:031375 
GPRS的ARM7嵌入式單片機(jī)視頻報(bào)警系統(tǒng)利用以單片機(jī)應(yīng)用系統(tǒng)為中心的小型嵌入式設(shè)備進(jìn)行數(shù)據(jù)采集,并通過(guò)網(wǎng)絡(luò)有效傳輸數(shù)據(jù),已成為數(shù)據(jù)采集領(lǐng)域的研究焦點(diǎn)。由于嵌入式單
2010-04-23 14:10:531168 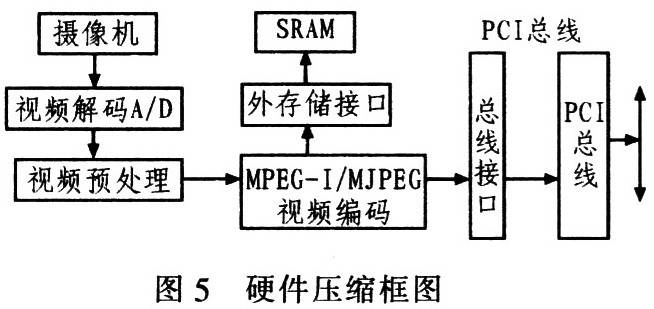
摘 要:為滿足光纖傳感地震加速度計(jì)對(duì)實(shí)時(shí)性、高精度以及網(wǎng)絡(luò)化的要求,提出了基于ARM 和DSP雙核微處理器的嵌入式系統(tǒng)設(shè)
2010-07-21 11:06:091153 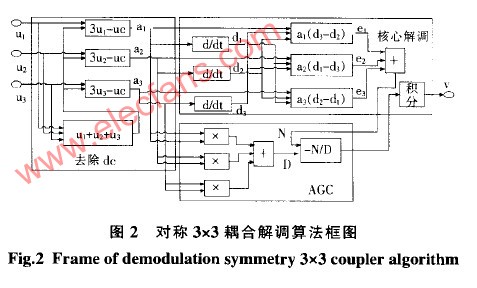
為了解決機(jī)房監(jiān)控中數(shù)據(jù)傳輸實(shí)時(shí)性差、成本高以及人工巡邏效率低的問(wèn)題,討論了ARM7的數(shù)據(jù)采集和串口通信原理,針對(duì)惡劣條件下數(shù)據(jù)傳輸誤差大的特點(diǎn),提出將GPRS無(wú)線通信和高效節(jié)能芯片LPC2114相結(jié)合的設(shè)計(jì)方案。既實(shí)時(shí)、有效地將機(jī)房信息傳送到監(jiān)控中心,又
2011-03-07 15:24:06103 為了預(yù)防輸電線舞動(dòng),減少因輸電線舞動(dòng)造成的損失,研制了一套基于 加速度傳感器 的遠(yuǎn)程無(wú)線輸電線舞動(dòng)監(jiān)測(cè)系統(tǒng)。該系統(tǒng)由加速度傳感器、無(wú)線GSM模塊、數(shù)據(jù)采集終端組成。其中
2011-07-15 18:05:3560 為了精確、高效地測(cè)量 微機(jī)械加速度計(jì) 的各項(xiàng)性能指標(biāo),并盡可能地降低地線干擾,系統(tǒng)采用DAQ一221 3數(shù)據(jù)采集卡采集加速度計(jì)輸出電壓,使用多個(gè)獨(dú)立電源及差模接法來(lái)降低地線干擾
2011-07-16 11:51:2023 這里介紹了一種基于ARM7風(fēng)機(jī)監(jiān)測(cè)儀的數(shù)據(jù)采集接口方案,A/D芯片就是采用MAXl320,該監(jiān)測(cè)儀的處理器采用Philips公司的LPC2290。
2011-09-27 11:42:295806 
為解決圖像監(jiān)控設(shè)備中圖像數(shù)據(jù)的實(shí)時(shí)采集與存取問(wèn)題, 研究了一種新型圖像數(shù)據(jù)采集系統(tǒng)。該系統(tǒng)選取基于ARM7的處理器AT91SAM 7XC512, 運(yùn)行的是
2011-09-30 16:16:07204 數(shù)據(jù)采集向高精度和高速度兩個(gè)方向發(fā)展。高精度數(shù)據(jù)采集依賴于A/D器件的精度,高速度數(shù)據(jù)采集不僅依賴于A/D器件的速度還依賴于數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)。高速數(shù)據(jù)采集按是否可連續(xù)
2012-05-16 14:45:551665 
基于常用的MEMS慣性器件微型加速度計(jì),介紹一種采用ARM和FPGA架構(gòu)來(lái)采集加速度數(shù)值的設(shè)計(jì)方案,微加速度計(jì)的模擬輸出信號(hào)經(jīng)A/D芯片轉(zhuǎn)換后由FPGA進(jìn)行處理和緩存,然后ARM接收FPGA的輸
2012-05-31 10:57:171593 
為了實(shí)現(xiàn)運(yùn)輸過(guò)程中對(duì)食品環(huán)境溫度的實(shí)時(shí)監(jiān)測(cè)與記錄,本文設(shè)計(jì)了一種基于ARM7的溫度采集與存儲(chǔ)系統(tǒng)。系統(tǒng)采用AT91SAM7S64芯片進(jìn)行控制和DS18B20溫度傳感器進(jìn)行溫度采集,將采集到的溫
2013-06-26 16:24:1182 這個(gè)資料是關(guān)于 基于ARM7進(jìn)行數(shù)據(jù)采集方面的系統(tǒng)設(shè)計(jì)的東西,希望大家相互學(xué)習(xí),相互進(jìn)步
2015-11-18 17:00:160 位移+速度+加速度采集顯示(反饋節(jié)點(diǎn)形式)。
2016-05-06 11:29:3119 基于ARM7與FPGA架構(gòu)的面陣CCD圖像采集系統(tǒng)的設(shè)計(jì)
2016-08-29 15:31:4119 針對(duì)多點(diǎn)大范圍變化溫度數(shù)據(jù)采集的遠(yuǎn)距離傳輸誤差問(wèn)題 ,提出一種基于一線式 多通道溫 度數(shù)據(jù)采集和溫度數(shù)據(jù)無(wú)線傳輸?shù)脑O(shè)計(jì)方案 ,重點(diǎn)闡述大測(cè)量范 圍變化的溫度測(cè)量 實(shí)現(xiàn)方法和無(wú)線數(shù)據(jù)傳輸模塊化設(shè)計(jì)方法。
2016-10-25 18:27:5915 基于ARM的數(shù)據(jù)采集與控制系統(tǒng)設(shè)計(jì)
2016-12-17 15:26:592 基于FPGA的侵徹加速度信號(hào)采集系統(tǒng)設(shè)計(jì)_董勝飛
2017-01-13 21:40:362 MEMS加速度傳感器標(biāo)定測(cè)試采集系統(tǒng)的設(shè)計(jì)_于春華
2017-01-17 19:58:245 新的基于ARM的數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
2017-10-31 10:26:597 和ADIS16355傳感器的數(shù)據(jù)采集系統(tǒng),通過(guò)實(shí)車測(cè)試得到了汽車的橫擺角速度與側(cè)向加速度的數(shù)據(jù),分析了干擾源,并且對(duì)數(shù)據(jù)采用卡爾曼濾波方法進(jìn)行處理。 1系統(tǒng)工作原理 ADIS16355傳感器裝在接近汽車的中心位置上(接近汽車的質(zhì)心位置),建立汽
2017-11-21 15:29:582 所謂數(shù)據(jù)采集,就是通過(guò)傳感器把一些物理量轉(zhuǎn)換成模擬電信號(hào),經(jīng)過(guò)處理后再轉(zhuǎn)換成計(jì)算機(jī)能識(shí)別的數(shù)字量,送入計(jì)算機(jī)。數(shù)據(jù)采集的關(guān)鍵問(wèn)題是采集速度和精度。采集速度主要與采樣頻率和A/D轉(zhuǎn)換速度有關(guān),采集精度主要與A/D轉(zhuǎn)換器的位數(shù)有關(guān)。高速數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)需要解決的是系統(tǒng)在速度、精度、數(shù)據(jù)存儲(chǔ)方面的矛盾。
2018-04-18 15:53:002203 
本文提出了基于ARM7系列 LPC2210 微控制器和嵌入式操作系統(tǒng) μC / OS—II 來(lái)實(shí)現(xiàn) 觸摸屏 觸摸點(diǎn) 數(shù)據(jù)采集系統(tǒng) 的設(shè)計(jì),并完成了微控制器與上位機(jī)之間的物理層電路轉(zhuǎn)換,實(shí)現(xiàn)了基于LIN總線的數(shù)據(jù)通信,能夠在上位機(jī)得到觸摸點(diǎn)的精確坐標(biāo)以及控制菜單信息,并且準(zhǔn)確可靠、傳輸速率高。
2018-04-01 11:01:002740 
為飛利浦公司的一款ARM7系列微控制器,主要用于工業(yè)控制、醫(yī)療系統(tǒng)、訪問(wèn)控制、POS機(jī)、通信網(wǎng)關(guān)等領(lǐng)域。本文使用LPC2103實(shí)現(xiàn)對(duì)ADXL202加速度數(shù)據(jù)的采集與處理。
2020-08-14 11:13:152400 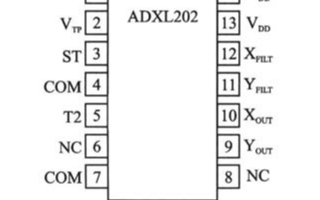
基于石英撓性加速度計(jì)A/D與I/F數(shù)據(jù)采集系統(tǒng)
2021-06-19 14:26:1414 現(xiàn)代車載數(shù)字視頻記錄系統(tǒng) (DVR) 或 OBD 正在使用加速度計(jì)(g 傳感器)來(lái)測(cè)量車載加速度。這允許DVR在發(fā)生預(yù)定義事件(例如急剎車或碰撞)時(shí),使用日期/時(shí)間/加速信息為錄制的視頻加水印。將視頻保存到系統(tǒng)內(nèi)存(如硬盤或SD卡)時(shí),水印很有幫助。
2023-01-06 15:24:382476 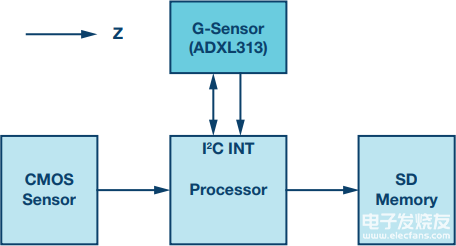
為了檢查模塊化夾緊系統(tǒng)是否適合于CFRP零件的加工,在處理零件輪廓時(shí),使用加速度數(shù)據(jù)記錄儀MSR165記錄了用夾緊系統(tǒng)夾緊的工件的動(dòng)態(tài)特性。加速度
2021-09-24 17:44:101336 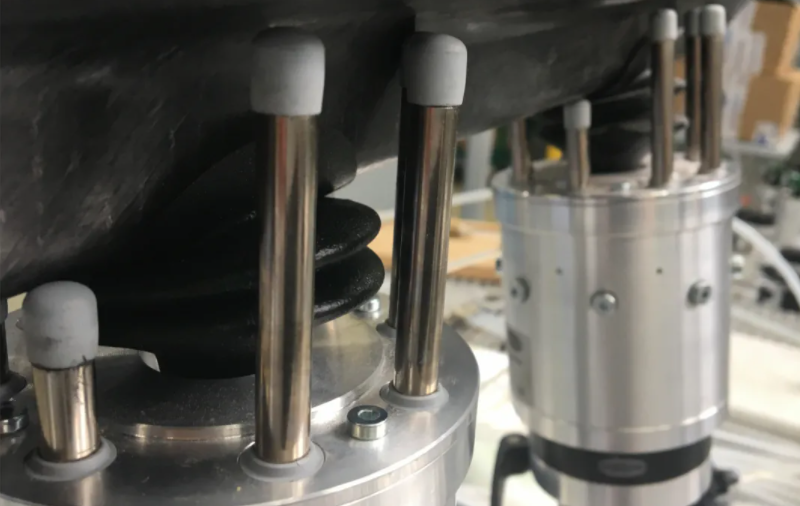
電子發(fā)燒友網(wǎng)站提供《基于ARM7的機(jī)房無(wú)線監(jiān)控系統(tǒng)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-27 09:33:590 本文將介紹實(shí)時(shí)獲取和處理加速度數(shù)據(jù)。程序的核心流程包括初始化硬件接口、配置加速度計(jì)的參數(shù),以及通過(guò)輪詢檢查中斷信號(hào)來(lái)不斷讀取加速度數(shù)據(jù)。
2024-08-09 15:43:201471 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論