上一回我們簡單聊了步進馬達里面的結構,以及它為什么可以用小角度一步一步轉動的原理,另外也介紹了兩相式步進馬達常見的兩種接線方式。
2023-12-14 15:45:47 8802
8802 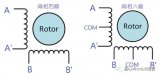
減速電機是指減速機和電機(馬達)的集成體。這種集成體通常也可稱為齒輪馬達或齒輪電機。
2020-03-31 09:02:30
步進馬達的正反轉 加速驅動程序。探討最優程序
2012-07-03 17:19:33
最近在做步進電機的控制,在步進電機的控制中,步進電機的加減速控制時比較難的一方面。搜索了一些關于步進電機的加減速控制的論文,其中都有提到S曲線的加減速控制時最理想的控制方案,但是在控制的過程比較復雜
2017-12-04 23:31:40
一、靜態指標術語 二、動態指標術語 三、步進電機加減速過程控制技術 四、步進電機的細分驅動控制 五、步進電機控制策略
2021-07-08 09:25:50
步進電機加減速控制子程序分享
2021-12-21 07:37:32
步進電機加減速設計設計要求:1、設置開始、停止及加減速健;2、要求顯示運行狀態,并設置一個極限值,當速度超過極限時發出報警信號。急!!!!!!!!!!!!
2013-11-19 22:13:47
轉動的速度和加速度,從而達到調速的目的。減速電機減速電機是由減速器(齒輪箱)+電機組成而成,電機提供的是速轉速...
2021-07-08 08:16:34
說明根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄。5.3 單極驅動與雙極驅動??有關單極驅動方式與雙極驅動方式,已在第2章說明,此處再舉例說明。VR型步進電機定子磁極吸引轉子時,由于轉子磁極為永久磁極,有磁化的N極和...
2021-07-08 08:57:25
步進電機由鍵盤控制。可實現 加速 減速 左轉 右轉 鍵盤輸入任意角度(0~999度),步進電機轉動到相近位置。
2021-07-08 06:59:07
目錄步進電機梯形加減速梯形加減速算法原理分析算法實現步進電機梯形加減速電機的控制方式一般分為開環控制與閉環控制兩種控制方式,其中開環控制原理框圖如下:這種種控制方式的特點是:控制簡單、實現容易、價格
2021-07-07 07:53:48
最近公司的一個項目用帶驅動器的步進電機,奈何,經理讓我搞個勻加速的啟動和停止。以前從來沒考慮過算法的我,走了很多彎路,不過最后還是解決了這個問題。梯形加減速應該是指數加速算法和S型加速算法中最簡單也
2021-07-08 06:49:48
步進電機的加速時間是怎么樣的?問:有一臺步進電機,步進電機的最高轉速為每分鐘1000轉,需要做來回運動,移動距離均在0.5—1mm左右,它的單次加速時間和減速時間大約為多少?答:步進電機的加速時間
2021-07-08 06:47:02
方波)。S型曲線的的方程,在[-5,5]的圖形如下圖所示:如要將此曲線應用在步進電機的加、減速過程中,需要將方程在XY坐標系進行平移,同時對曲線進行拉升變化:其中的A分量在y方向進行平移,B分量在y
2021-06-28 08:41:08
過程,以保證實現步進電機精密定位控制。加速和減速的原理是一樣的。以加速實例加以說明:加速過程是由基礎頻率(低于步進電機的直接起動最高頻率)與跳變頻率(逐漸加快的頻率)組成加速曲線(降速過程反之)。跳變頻
2016-01-11 15:02:13
前言基本信息名稱描述說明教材名稱步進電機應用技術作者坂本正文譯者王自強前言說明根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄。5.7 加速控制、減速控制??步進電機驅動負載可以按希望的速度起動,若驅動速度超過自身起動脈沖頻率時
2021-07-08 06:45:53
目錄步進電機S形加減速簡介七段S形加減速算法原理分析五段S形加減速算法實現算法分析查表法編程實現思路及方法S曲線加減速流程圖步進電機S形加減速簡介一個物體從起點運動到終點要經歷加速、勻速、減速的過程
2021-07-08 09:18:53
DDA輸出脈沖序列控制步進電機正反轉,可實現電機加速、減速、勻速。
2021-06-29 08:49:55
使用STSPIN220芯片的雙極步進電機的輸出端是否需要反激二極管?
2023-01-04 07:27:38
` 工作后,由于工作需要,花了半個月,應用stm32從最基本的pwm例程,一點點實現了步進電機的曲線加減速控制。但是這個曲線加速,是設定好了加減速時間,加減速斜率后,就按照這個規律去進行加速,勻速
2015-12-25 17:39:53
主要是控制滑塊的運動,開始運動時需要加速,當穩定在最高速度時勻速運動,檢測到下端限位信號時,開始減速直到停止,然后進行反向加速,勻速,檢測到上端限位時停止運動。加速——勻速——減速——停止——反向——加速——勻速——停止2.硬件部分本次電機為兩相四線步進電機,兩相:電機有兩個線圈...
2021-06-29 08:13:12
摘要: 在回答這個問題之前,先來了解下什么是步進電機和減速電機? 步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率
2021-09-03 07:20:33
伺服系統中除了關注輸入的頻率和脈沖數還有一項就是加減速過程常見的加減速方式1. 直線加速根據該圖可以看到非常直觀的加減速過程(實際使用中發現減速應該要更長),確定加減速時間常量,再解出...
2021-06-28 09:32:29
各位大俠,小弟在此求教,如何用單片機控制步進電機驅動器,來控制步進電機啟動時自動加速,停止時自動減速
2012-12-21 21:24:41
各位大俠,小弟在此求教,如何用單片機控制步進電機驅動器,來控制步進電機啟動時自動加速,停止時自動減速
2012-12-21 21:26:19
` 本帖最后由 gk320830 于 2015-3-5 21:34 編輯
各位大俠們,單片機控制步進電機驅動器,來控制步進電機怎樣實現啟動時自動加速,停止時自動減速`
2012-12-21 21:19:21
單片機控制步進電機,clk-,dir-,en-,三端接控制端,要實現電機勻加速啟動和勻減速停止,這個應該怎么去考慮呢,現在我還沒有想到好的方法。大神們給我點意見吧,謝謝啦。
2015-01-29 12:11:00
如何去實現步進電機的加減速?步進電機絕對位置的調用方法是什么?
2021-09-27 09:05:23
步進電機驅動板的原理是什么?如何去控制步進電機的減速、加速以及正反轉?
2021-06-30 07:27:11
如何點亮步進馬達的led燈?
2021-10-18 06:23:20
Arduino步進電機控制示例在本文中,我們將展示如何連接雙極步進電機到Arduino Uno板,步進電機使用的是四線雙極步進電機。由于步進電機所需要的電流比Arduino處理器所能承受的電流要
2021-08-31 06:48:00
如何連接雙極步進電機到Arduino Uno板?
2021-10-28 09:07:16
如何通過編程控制步進電機的正轉,反轉,加速,減速?
2021-10-18 09:30:00
控制步進電機加速和減速是如何實現的
2023-10-15 07:00:48
儀器內部有一款這種 JS30減速電機,轉速誤差大,有時 轉一圈是30秒,有時轉一圈是35秒;我們自己網上查找資料,這款減速電機下面的馬達是R300C電機,想找一個微型步進電機(比如說美蓓亞的PM24
2022-05-16 11:35:33
微型馬達。 2、按運轉速度分類微型馬達按運轉速度可分為高速微型馬達、低速微型馬達、恒速微型馬達、調速微型馬達。低速微型馬達又分為齒輪減速微型馬達、電磁減速微型馬達、力矩微型馬達和爪極同步微型馬達等。 3
2021-06-16 10:45:42
實習公司項目需要控制步進電機,電機方面主要包括控制運動、加減速、限位。下面介紹一下在電機控制方面的心得,由于對于電機的控制不需要很精確,并且自身能力有限,相比于大牛有很大的差距。1.需要實現的功能
2021-07-08 06:42:20
步進電機在實際運用當中常常要使用加減速控制,才能達到精準的定位和快速反應的要求。加減速控制主要包括以下三種方法:直線型加減速速度曲線 此種升降速控制方法計算簡單,節省資源,但加速、勻速和減速過程不能
2016-01-12 11:04:45
電機后天就可以發貨了,希望減速電機在使用過程都順順利利的。同時也非常感謝徐師傅及其公司領導對我們山藤品牌直角軸減速馬達的信任。山藤品牌直角軸減速馬達特色之處:不僅安靜,更提升30%的傳動效率!`
2016-06-15 11:52:11
的一部分,一個內部分度器產生步進馬達正確雙向變向所需的所有波形。一個STEP輸入的簡單方波控制后續步,而DIR輸入規定旋轉的方向。圖2顯示了如何將這種復雜的實現壓縮成一種單片解決方案。圖 2 具有雙極步進
2018-09-26 10:53:16
請求大佬分享一個步進電機加速-勻速-減速運行程序?
2021-10-27 07:46:27
請問51單片機如何控制步進電機加速、減速及反轉?
2021-10-18 06:53:50
請問伺服馬達和步進馬達的區別在哪里?
2021-10-12 08:08:03
權衡取舍的是,在任何給定的時刻,電動機僅使用一半的繞組,從而阻止了全部轉矩能力。相反,雙極步進電機只有四根線連接到電機繞組,它們也標記為A +,A-,B +和B-。如圖3所示,雙極步進電機沒有中心Vm
2020-12-17 10:05:28
本文介紹如何使用VB程式透過RS232傳輸控制指令到89C51單晶片上,輸出派波訊號至放大電路,控制步進馬達反轉,放大電路也就是所謂的步進馬達驅動器,市售步進馬達驅動器借個在
2009-10-17 14:47:00 21
21 步進電機加速-勻速-減速運行程序(C51)
ME300系列單片機開發系統+步進電機模塊演示程序
功能:
2008-12-28 10:10:407179 步進電機加速-勻速-減速運行程序(ASM)
功能: 步進電機以加速方式啟動,轉速達到程序規定的最快速度后保持一段時間
2008-12-28 10:12:435274 雙極性步進馬達驅動電路
2009-10-07 17:00:141062 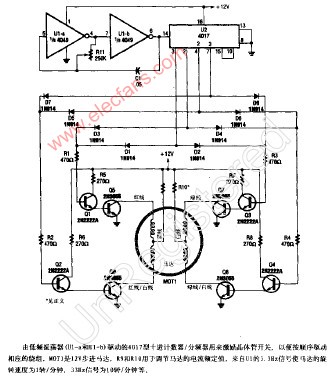
用于步進馬達的雙時鐘電路
這個
2009-10-07 17:07:251550 
基于A4982設計的DMOS微型步進馬達驅動技術
Allegro公司的A4982是集成了電平轉換和過流保護的微型步進馬達驅動器,適用于雙極步進馬達驅動,工作在全步
2010-05-12 18:11:293204 
4線單極性步進馬達線 雙四拍工作實驗【匯編版】
2015-12-30 13:49:420 5線單極性步進馬達線 單雙八拍實驗1【匯編版】
2015-12-30 13:49:500 5線單極性步進馬達線 雙四拍實驗【匯編版】
2015-12-30 14:11:590 5線單極性步進馬達線 加減速實驗【匯編版】
2015-12-30 14:12:070 5線單極性步進馬達線 單雙八拍實驗2【匯編版】
2015-12-30 14:12:140 基于S曲線的步進電機加減速的控制,下來看看
2016-05-03 13:52:5937 基于ARM芯片的步進電機加減速控制,下來看看
2016-05-03 13:52:5923 基于ARM芯片的_步進電機加減速控制,下來看看
2016-05-03 13:52:598 步進電機加減速控制,又需要的朋友 下來看看
2016-05-04 14:09:5634 步進馬達的詳細講解步進馬達的詳細講解步進馬達的詳細講解
2021-11-30 11:55:580 步進馬達基本原理步進馬達基本原理步進馬達基本原理
2021-11-30 11:55:589 本文中,我們假設讀者已熟悉如何利用市場上已有集成微步進驅動器,對步進馬達進行控制。步進驅動器(例如Tl DRV8818等)的輸出與方波(步進輸入)頻率成正比。每個步進脈沖均等于驅動器步進邏輯定義步進
2017-12-06 14:31:2119 隨著市面上越來越多步進電機驅動器的推廣,使得步進電機的操控和使用越來越方便,但是在某些場合下需要步進電機運行在高速狀態下,為了防止步進電機的失步、過沖、堵轉現象,需要合理設計其加減速過程.從步進電機
2018-01-24 15:38:142 在減速機家族中,行星減速機外形美觀,定位精準,經濟實用,精度高,承載力大,適用于各種直流伺服馬達,交流伺服馬達,步進馬達的減速轉動,其廣泛應用于精密機床,自動切割設備,冶金設備,印刷設備,注塑機設備,包裝設備等鄰域。
2018-10-24 09:23:4016458 減速步進電機與普通步進電機的區別有哪些?順力電機減速步進電機與普通步進電機的區別有哪些?下面順力電機小編來給大家詳細介紹。減速步進電機的轉速、停止的位置只會取決于脈沖信號的頻率以及脈沖數,而不受負載
2018-12-13 16:50:244201 的步進電機加速度和速度控制方法,并討論了當約束參數發生變化時實際的 S 曲線規劃方法。最后,給出了不同約束條件下步進電機的加減速仿真曲線。研究結果表明,這種方法可以滿足不同約束條件下步進電機加減速的控制。
2019-03-13 08:00:000 從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2021-06-12 11:55:003345 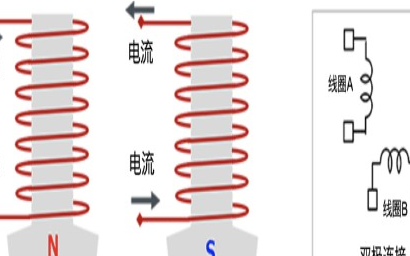
微型減速馬達(又稱微型減速電機或減速馬達),是對微型電機及齒輪箱進行集成組裝的減速傳動機構,用來降低轉速和增大轉矩,以滿足機械設備工作的需要。 簡介 微型減速馬達產品具有“體積小、扭力大、噪音低
2021-12-24 09:58:073583 該雙極步進電機驅動器電路將使用外部提供的 5V 電平驅動雙極步進電機,用于步進和方向。這些通常來自計算機中運行的軟件或微控制器單元。該電路使用 IRFZ44 和 MTP2955 MOSFET。
2022-06-13 15:09:406056 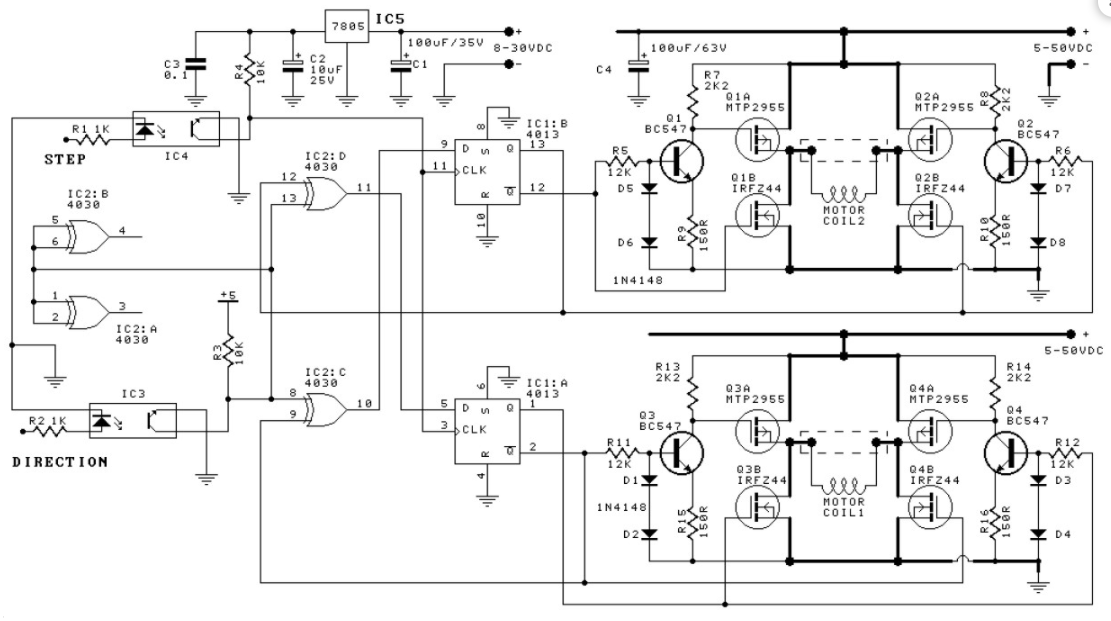
TB6600HG 是 PWM 斬波型單芯片雙極正弦微步步進馬達驅動器。
可通過 2-相,1-2-相,W1-2-相,2W1-2-相,和 4W1-2-相勵磁模式,實現
正向和反向旋轉控制。
2-相雙極步進馬達僅由低振動高效率時鐘信號即可驅動。
2022-11-15 17:14:3813 兩相雙極步進電機的驅動:驅動電路,先來看兩相雙極驅動電路的基本框圖示例。可使用雙通道的H橋驅動電路來驅動兩相雙極步進電機。
2023-02-24 09:51:113205 
在上一篇文章“兩相雙極步進電機的驅動 其1”中,給出了兩相雙極步進電機的基本驅動電路示例和驅動波形。此次“兩相雙極步進電機的驅動 其2”篇,將介紹驅動兩相雙極步進電機過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:114361 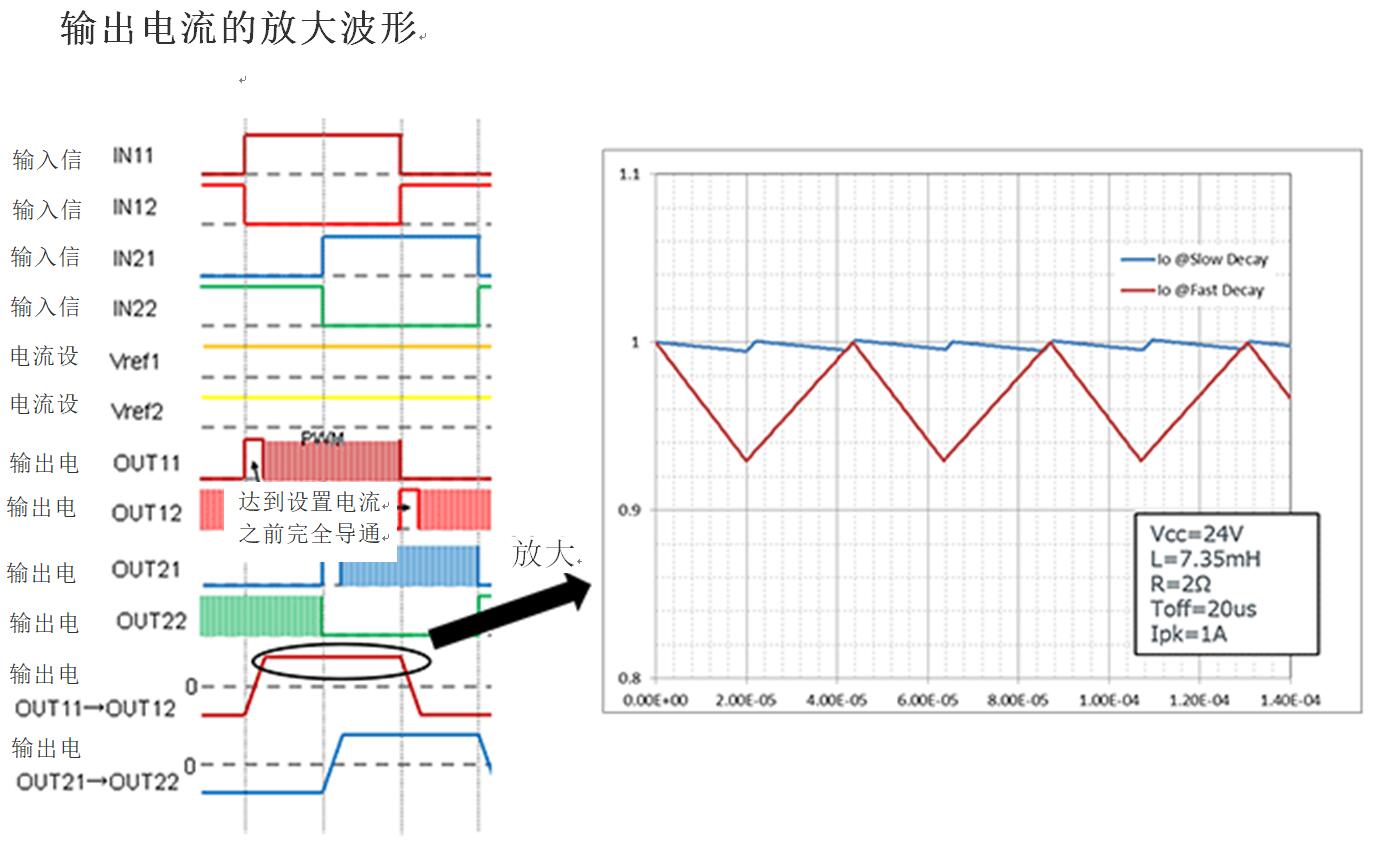
步進電機減速機
2023-03-07 16:58:204955 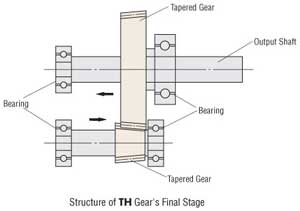
從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:051799 
與兩相雙極步進電機的驅動電路相比,兩相單極步進電機的驅動電路在輸入段配置、內部邏輯及控制電路和驅動電路使用雙通道方面基本相同,但是輸出段的配置不同。兩相雙極步進電機使用雙通道H橋來驅動,而兩相單極步進電機則使用雙通道的2個開關(MOSFET)來驅動。
2023-03-10 09:18:462698 
目錄 步進電機梯形加減速 梯形加減速和S型曲線比較 如何產生PWM波及TIMx定時器配置 梯形加減速算法原理分析 1.梯形加減速 2.步進電機基礎方程 3.精確計算步進時間間隔 4. 加速度的變化
2023-03-17 15:08:377 步進電機S形加減速簡介:
一個物體從起點運動到終點要經歷加速、勻速、減速的過程,把整個過程中速度隨時間變化關系畫出來,就是速度曲線。 “S”形加減速就是指速度曲線中加減速階段的曲線呈現一個英文字母
2023-03-20 14:33:551 使用加減速的目的是:防止步進電機的啟動頻率過快而無法正常啟動,避免控制脈沖頻率變化過大造成電機丟步或過沖。
空載啟動頻率,即步進電機在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機
2023-03-24 11:00:435 時鐘控制雙極步進馬達驅動器TB62262FTAG 是一種 PWM 法時鐘控制的兩相雙極步進馬達驅動器。使用 PWM 斬波。接口是時鐘控制。采用 BiCD 工藝制造,額定值為 40 V/ 1.5 A
2023-05-18 09:32:110 時鐘控制雙極步進馬達驅動器TB62262FTAG 是一種 PWM 法時鐘控制的兩相雙極步進馬達驅動器。使用 PWM 斬波。接口是時鐘控制。采用 BiCD 工藝制造,額定值為 40 V/ 1.5 A
2023-05-18 09:31:261 特點? 單芯片雙極正弦微步步進馬達驅動器? Ron (上+下) = 0.4Ω (typ.)? 正向和反向旋轉控制可用? 可選相驅動(1/1 1/2 1/4 1/8 和 1/16 步)? 輸出耐壓
2023-05-18 09:29:080 特點? 單芯片雙極正弦微步步進馬達驅動器? Ron (上+下) = 0.4Ω (typ.)? 正向和反向旋轉控制可用? 可選相驅動(1/1 1/2 1/4 1/8 和 1/16 步)? 輸出耐壓
2023-05-18 09:27:471 從本質上來講,減速馬達之所以優于普通馬達,主要在于其配備有齒輪減速器。
普通馬達通常來說只有一根通軸,所有的零部件都圍繞著這根軸,前后只有銅套,沒有軸承,動力也是直接傳送至發動機的齒圈。而減速馬達則是分成了行星減速機構與電機兩部分,一律采用滾針軸承和單溝球軸承。
2021-11-27 14:18:3020251 
步進電機作為一種常用、應用廣泛的驅動電機,通常會搭配減速設備一起使用,以達到理想傳動效果;而步進電機常用的減速設備和方法,有如減速齒輪箱、編碼器、控制器、脈沖信號等。
2023-10-05 09:29:002922 1.步進電機配減速機的原因步進電機切換定子相電流的頻率,如改變步進電機驅動電路的輸入脈沖,使其變成低速運動。低速步進電機在等待步進指令時,轉子處于停止狀態,在低速步進時,速度波動會很大,此時如改為
2023-09-25 08:08:492866 
實際應用中,步進電機的運動過程中需要考慮加減速問題,以達到精準的位置控制要求。 一般來說,步進電機的加減速時間需要根據實際情況進行設置。對于不同的應用場景,需要進行不同的設置。在步進電機的控制系統中,加減速時
2023-10-13 17:39:352202 減速馬達調速器使用注意事項? 減速馬達調速器是一種廣泛應用于工業生產中的設備,能夠通過調節電機的轉速來實現生產過程中的速度控制。在使用減速馬達調速器時,需要注意一些關鍵事項,以確保安全和有效的運行
2023-11-23 10:47:331907 步進電機的雙極連接和單極連接是指其電氣接線方式,這兩種方式影響電機的驅動方法、控制電路設計以及性能。了解這些接線方式對于正確選擇和使用步進電機至關重要。 雙極連接(Bipolar):在雙極連接方式中
2024-02-06 10:42:544500 
雙極步進電機(也稱為兩相步進電機)是一種特殊的電機類型,它能夠將電脈沖信號轉換為精確的角位移或線位移。這種電機通常包含兩個主要的線圈(或稱為相),每個線圈都有兩個導線(總共四根線),用于控制電機的轉動。
2024-06-20 16:30:401729 
在當今科技飛速發展的時代,各種先進的技術和設備不斷涌現,其中步進馬達驅動技術在眾多領域發揮著至關重要的作用。今天,就讓我們一同深入探索 MS35711T 步進馬達驅動的奇妙世界。 一
2024-10-17 18:12:21975 步進電機是一種將電脈沖信號轉換為角位移或線位移的電機,廣泛應用于各種自動化控制系統中。在加減速過程中,步進電機的控制技術至關重要,以確保系統的穩定性和精確性。 加減速控制原理 步進電機的加減速控制
2024-10-23 10:02:002116
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論