傳感器的方式,利用第三相產生的感生電動勢過零點時刻延遲30°換向。##反電勢檢測法只有在電機正常運轉后才能進行,當電機不轉或轉速很低時,其反電勢無法檢測,因而采用軟件啟動的方式。針對無位置傳感器無刷直流電機的控制,本文采用三步啟動的方法,首先,給A,B相通電一段時間以固定電機轉子位置;六
2015-01-12 13:54:28 15926
15926 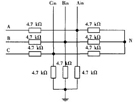
存在換相轉矩脈動較大、無位置傳感器控制、制動能量回饋制動困難等一些問題,這也是無刷直流電機沒有在電動車輛驅動系統中得以廣泛應用的主要原因。為提高無刷直流電動機的性能,研究提出了一種使用單端初級電感
2023-01-13 09:37:511100 運動的原理都是依靠磁場,要么利用磁場的異性相吸,要么利用磁場的同性互斥。無刷直流電機和有刷直流電機的主要區別在于,無刷電機電流的大小和方向是通過控制器來改變的。通常,定
2025-05-23 21:00:166990 
近年來,國內市場上電動車使用的電機主要有三種:有刷電機、有位置傳感器無刷電機和無位置傳感器無刷電機。使用有刷直流電機容易解決換相問題,但是噪音大,而且碳刷容易磨損或損壞,這會增大維護、維修難度,增加
2019-09-03 07:03:34
無傳感器無刷直流電機控制原理是什么?怎樣去分析無傳感器無刷直流電機開發板的部分硬件電路?無傳感器無刷直流電機部分代碼分析與運行結果如何?
2021-07-22 06:14:51
摘要;無位置傳感器無刷直流電機(SLBLDCM)結構緊湊,效率高,性能穩定,得到了廣泛應用.但SLBLDCM的控制存在一些技術難點.一是轉子位置檢測難度大,二是啟動難度大,三是在運行階段換相信
2018-11-13 11:15:52
摘要:超前或滯后換相會造成無刷直流電機(BLDCM)輸出轉矩的減小和系統效率的降低。以平均電磁轉矩最大化為目標,提出了一種基于擴展卡爾曼濾波算法的無刷直流電機最佳換相時刻估算方法。該方法建立了平均
2025-07-10 16:41:57
永磁無刷直流電機由于其無換向火花、運行可靠、維護方便、結構簡單、無勵磁損耗等眾多優點,自20世紀50年代出現以來,就在很多場合得到越來越廣泛的應用。傳統的永磁無刷直流電機均需一個附加的位置傳感器,用以向逆變橋提供必要的換向信號。
2020-03-13 06:29:33
我想問問有誰做無刷直流電機這方面的內容,我自己的硬件一直沒法讓無位置無刷直流電機轉動,所以拜托各位大神告訴我做這個方面的東西需要哪些硬件和軟件支持?
2018-01-07 09:50:37
摘要:反電動勢過零檢測法是應用最廣泛的一種無刷直流電機(BLDCM)轉子位置辨識方法。為消除由于 PWM 高頻開關噪聲產生的影響,該方法一般需采用硬件濾波電路來對測量的信號進行處理,由此帶來轉子位置
2025-07-10 16:40:19
無位置傳感器是怎樣啟動的?無位置無刷直流電機的準閉環啟動有何優勢?
2021-09-23 08:41:07
摘要:通過分析無刷直流電動機數學模型,利用MalabSimulink對無刷直流電機無位置傳感器控制系統進行了建模和仿真。分別用Simuink庫中自帶的電機模型,反電動勢過零點檢測法、速度P控制和電流
2025-07-08 18:37:06
無刷直流電機與有刷直流電機的對比直流有刷電機和無刷電機的區別是是否配置有常用的電刷換向器。有刷直流電機的換向一直是通過石墨電刷與安裝在轉子上的環形換向器相接觸來實現的。而直流無刷電機則通過霍爾傳感器
2020-03-16 16:08:14
什么是無刷直流電機?無刷直流電機是由哪些部分組成的?無刷直流電機的換向原理與工作原理是什么?
2021-08-17 07:51:54
無刷直流電機的基本工作原理是什么?無刷直流電機的轉子是怎么轉動的呢?怎樣確定換向時機?怎樣控制無刷直流電機的方向和轉速?
2021-07-23 09:34:44
無刷直流電機(BLDC)具有哪些特點?無刷直流電機是如何進行工作的?無刷直流電機的驅動方法有哪些?
2021-08-11 07:48:12
我是剛開始研究BLDC的,問下各位,大家買的無刷直流電機一般是哪種啊,我就是做學術研究用的,想做個無位置傳感器的控制,大家推薦一下,謝謝!
2014-11-24 16:02:19
`采用FOC控制方法對無刷直流電機進行位置控制,下圖中要做什么改動。`
2017-11-20 10:56:08
Microchip 的應用筆記 AN1083 詳細地講述了一種無傳感器無刷直流電機的控制算法,其配套的開源算法采用 dsPIC? 數字信號控制器實現,此前在淘寶購入了一塊基于 STM32 的無刷直流電機開發板,于是試著將該開源代碼移植至手上這塊開發板上。開發板如下圖所示: 因硬件平臺不...
2021-08-17 06:39:53
具有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。圖1:無刷直流電機模型示意圖BLDC電機的運轉示意圖無刷直流電機主要由用永磁材料制造的轉子、帶有線圈繞組的定子和位置傳感器(可有可無)組成
2019-07-04 07:00:00
請問誰做過基于STM32無位置傳感器無刷直流電機控制系統,有沒有STM32無刷直流電機控制部分的C程序,發給我參考下吧。
2014-01-18 09:24:22
摘要:針對無位置傳感器無刷直流電機在靜止和低速狀態下檢測轉子位置較為困難的問題,提出了一種新的無位置傳感器無刷直流電機電感法定位、無反轉起動的新方法,由于定子鐵芯的磁場飽和效應,定子繞組的電感將隨著
2025-07-28 15:04:59
為了解決永磁無刷直流電機(BLDOM)因其安裝三個霍爾傳感器而帶來的結構復雜、維修困難、對溫度很敏感等問題,國內外開始對無位置傳感器檢測無刷直流電機轉子位置的控制策略進行了大量研究。目前最常用的方法
2025-07-30 15:57:25
針對傳統的無位置傳感器無刷直流電機控制的起動需采用復雜的軟件、成本高、定位不準確、容易堵轉的缺陷,提出了一種通過檢測線電壓差獲得轉子位置的方法。提出的方法能在2%的額定轉速下準確檢測到轉子位置,從而
2025-08-07 13:30:56
無刷直流電機的控制策略如何控制無刷直流電機控制器和電源模塊選擇
2021-03-10 07:46:59
直流無刷電機的工作原理是什么?電機霍爾傳感器工作原理是什么?怎么實現無刷直流電機驅動電路的設計?
2021-10-09 07:04:15
什么是直流電機?有刷直流電機是怎樣工作的?無刷直流電機是怎樣工作的?怎樣通過霍爾傳感器去控制無刷直流電機呢?
2021-09-17 06:19:37
有刷直流電機的優點有哪些?缺點又有哪些?無刷直流電機的優點有哪些?缺點又有哪些?無刷直流電機的工作原理是什么?無刷直流電機的驅動方法有哪幾種?
2021-07-20 06:38:48
有刷直流電機和無刷直流電機的驅動器有區別嗎?
2015-09-02 10:32:20
有償求無刷直流電機無位置傳感MATLAB仿真模型
2014-05-29 20:48:07
有償求無刷直流電機無位置傳感MATLAB仿真模型QQ473525674
2014-09-18 20:35:20
永磁無刷直流電機與永磁同步電機的傳感器有哪些不同?永磁無刷直流電機與永磁同步電機的反電勢波形有哪些不同?
2021-09-18 08:10:43
永磁無刷直流電機與永磁同步電機的傳感器有何不同?永磁無刷直流電機與永磁同步電機的反電勢波形有何不同?永磁無刷直流電機與永磁同步電機的三相電流波形有何不同?
2021-08-12 07:35:58
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:節能空調用無刷直流電機的無位置傳感器控制方法.pdf【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
2025-06-04 14:38:04
無刷直流電機的驅動原理是什么?無刷直流電機的硬件該如何去設計?無刷直流電機的軟件該如何去設計?
2021-05-07 06:31:20
基于MEGA8單片機的無傳感器無刷直流電機控制系統設計-De ign of Control Sy tem Ba ed on MEGA8 Single Chip Computer for Sen orle and Bru hle DC Motor
摘要針對航模用無傳感器無刷直流電機具有體
2009-02-09 10:42:40 135
135 介紹變頻空調采用無傳感器無刷直流電機作為壓縮機的優越性,反電勢檢測的基本原理以及起動方法。變頻空調中壓縮機控制部分軟、硬件的結構和實現方法。關鍵詞:無刷直流電
2009-06-25 08:16:2170 介紹了利用無位置傳感器無刷直流電機控制器TDA 5142T 結合電機專用功率逆變橋M P6403 在無位置傳感器BLDCM 調速系統中的應用, 它是電機驅動控制的一種新的方法。實驗結果表明, 該方
2009-07-03 09:14:3767 討論了無刷直流電機無位置傳感器控制 提出一種基于擾動觀測器的無位置傳感器控制方案。無刷直流電機電勢平衡方程的非線性由反電勢所引起 如果假設反電勢為常值擾動 就
2009-07-10 15:49:0466 通過分析無刷直流電機間接位置檢測原理, 提出了基于徑向基函數(RBF) 神經網絡的無位置傳感器控制方法。該方法建立動態的RBF 網絡模型, 采用k2均值聚類法和遞推最小二乘法(RL
2009-07-13 09:45:1530 介紹了幾種無位置傳感器無刷直流電動機的轉子位置檢測方法, 并對它們的基本原理、實現途徑、改進策略、適用場合做了詳細的說明。
2009-07-13 11:44:5430 介紹了無刷直流電動機的轉子位置檢測的實現方法,并提出了各種控制策略,分析了產生轉矩脈動的各種原因及無位置傳感器的無刷直流電機的多種啟動辦法。
2009-07-17 11:06:0432 研究了無位置傳感器無刷直流電機的控制方法,深入分析了反電勢法的原理以及啟動等技術要點。
2009-07-18 16:04:0735 無刷直流電機是在有刷直流電機的基礎上發展起來的,它用位置傳感器代替了有刷直流電機的電刷和換向器,因此其內部發生的電磁過程和普通的有刷直流電機類似,無刷直流電機
2009-11-02 14:15:541909 摘 要:針對航模用無傳感器無刷直流電機具有體積小、質量輕、效率高和可靠性好等特點,設計開發了它的專用調速控制系統。首先分析了無傳感器無刷直流電機的電路原理。接著
2010-04-26 09:50:2548 無傳感器無刷直流電機控制原理
目前常用的無刷直流電機控制方法可分為開環控制、轉速負反饋控制和電壓負反饋加電流正反饋控制
2009-02-09 10:46:563986 
應用于光伏水泵系統中的無位置傳感器無刷直流電機的控制
摘要:介紹了應用于光伏水泵系統中的直流無刷電機及其控制方法,利用
2009-07-11 10:29:361342 
微型無刷直流電機的無位置傳感器控制
0 引言
??? 在一些應用場合要求使用的電機體積小、效率高、轉速高,微型永磁無刷直流電機能夠較好地滿足要
2009-12-02 09:32:202042 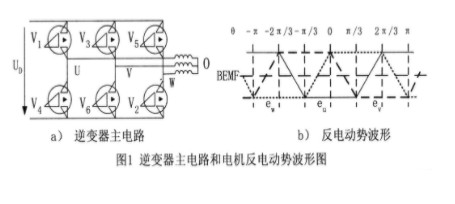
摘 要:介紹了無位置傳感器無刷直流電動機系統的控制原理,討論了該系統控制的實現方法,最后對基于數字信號處理器(DSP)芯片TMS320LF2407A的無位置傳感器無刷直流電動機控制系統的軟、硬件實現作了詳細論述。 關鍵詞:無位置傳感器;無刷直流電機;反電動勢
2011-03-01 01:37:58269 本文為用51單片機實現無位置傳感器無刷 直流電機 的控制,論文首先探討了無刷直流電機的研究現狀和常用控制方法,闡述了其基本組成和工作原理,并給出了詳細的設計過程。
2011-07-14 17:00:39265 針對電動客車提出了一種新的純電動客車用無刷直流電機的系統建模方法,該無刷直流電機模型可以實現無刷直流電機的性能、同時可以實現無刷直流電機的過流、欠壓及霍爾傳感器缺
2012-11-23 11:54:1187 基于STM32的無位置傳感器無刷直流電機控制系統
2015-11-09 18:03:2840 論文在詳細介紹無刷直流電機的運行原理及數學模型基礎上,對反電勢過零檢測法無位置傳感器控制的原理以及過零檢測電路的設計進行了詳細的分析研究。同時采用高頻脈沖檢測轉子零初始位置方法啟動電機,而后切換至反
2016-04-26 18:16:4220 基于MEGA8 單片機的無傳感器無刷直流電機控制系統設計
2016-05-05 11:37:3941 講述無刷直流電機運行原理與基本控制方法,不錯的教程,值得學習。
2016-08-26 14:39:260 針對無位置傳感器無刷直流電機存在的起動問題,根據無刷直流電機的起動換相時刻與直流母線電壓直接相關的特點,提出一種插值起動方法。該方法首先通過改變母線電壓值,采集相應的起動換相時刻數據樣本。在離線情況下,以母線電壓為輸入,換相時刻作為輸出,擬合出兩者之間的3 次樣條插值函數。
2016-09-18 14:55:041 的一個重要發展方向。本文介紹一種以st7fmc1k2為核心的無傳感器無刷直流電機控制系統。 通常無刷直流電機采用電子或機電式位置傳感器獲取轉子位置信息,然而有些傳感器的分辨率低或運行特性不好,有的對環境條件如震動,潮濕
2016-11-04 18:39:181408 
無位置傳感器無刷直流電機數控調速器設計
2016-12-20 22:55:157 基于線反電動勢的無刷直流電機無位置傳感器控制_李志強
2017-01-12 12:55:5420 無位置傳感器無刷直流電機控制系統設計_沈鵬程
2017-03-15 11:24:327 基于C-Dump變換器的無刷直流電機的無傳感器位置檢測方法的DSP軟件實現
2017-10-19 09:51:1812 隨著磁性材料、電力電子器件和控制技術的發展,無刷直流電機的應用越來越廣泛。無刷直流電機與直流電機和交流異步電機相比,具有調速特性好、無換相器和效率高的特點。因為無刷直流電機沒有換相器,需要采取一定
2018-02-09 14:07:579 基于擾動觀測器的無刷直流電機無位置傳感器控制實驗資料下載
2018-05-21 11:31:0012 無刷直流電機(BLDC)克服了有刷直流電機的先天性缺陷,以電子換向器取代了機械換向器,所以無刷直流電機既具有直流電機良好的調速性能等特點,又具有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。
2019-05-28 14:23:0825203 無刷直流電機(BLDC)克服了有刷直流電機的先天性缺陷,以電子換向器取代了機械換向器,所以無刷直流電機既具有直流電機良好的調速性能等特點,又具有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。
2019-06-06 13:34:4153569 無刷直流電機的組成,無刷直流電機組成部分:電機本體、位置傳感器、電子開關線路;電機本體在結構上與永磁同步電動機相似;電子開關線路由功率邏輯開關單元和位置傳感器信號處理單元兩部分組成;電子開關線路導通次序是與轉子轉角同步的,起機械換向器的換向作用。
2019-09-17 10:29:5534 設計了一種無位置傳感器無刷直流電機( Brushless dc motor,簡稱BDCM)的變頻調速系統。該系統基于PS2255智能功率模塊(IPM)和TMS320LF2407A數字信號處理器DP
2021-05-07 09:44:1512 基于PIC16的無傳感器無刷直流電機控制實現說明。
2021-05-10 14:13:4947 、帶有線圈繞組的定子和位置傳感器(可有可無)組成。 ? 無刷直流電機工作原理 無刷直流電機的定子是線圈繞組電樞,轉子是永磁體。如果只給電機通以固定的直流電流,則電機只能產生不變的磁場,電機不能轉動起來,只有實時檢測
2021-08-04 10:43:4426899 無刷直流電機運行原理與基本控制(電源技術應用 期刊)-無刷直流電機運行原理與基本控制方法,有需要的可以參考!
2021-09-15 14:27:4166 無刷直流電機的工作原理(電源技術期末考試)-無刷直流電機的工作原理,有需要的可以參考?
2021-09-15 14:32:32131 永磁無刷直流電機簡介(通信電源技術 期刊查稿)-永磁無刷直流電機簡介,有需要的可以參考!
2021-09-15 16:03:3816 永磁無刷直流電機(通信電源技術是核心期刊嗎)-永磁無刷直流電機,有需要的可以參考!
2021-09-15 16:10:1439 無刷直流電機原理圖(開關電源技術與設計 潘永雄)-無刷直流電機原理圖,有需要的可以參考!
2021-09-15 16:48:38132 無刷直流電機原理(大工18秋電源技術在線作業2)-無刷直流電機原理,有需要的可以參考!
2021-09-15 16:52:1295 三相無刷直流電機(現代電源技術基礎題庫)-BP6309 是一款高性能低成本的三相無刷直流電機正弦波控制芯片,芯片集成了霍爾位置解碼器、MOSFET 驅動、振蕩器等模塊,僅需很少的外圍元件即可構成完整的無刷直流電機驅動系統。
2021-09-16 14:04:0797 無刷直流電機的轉速與加在線圈上的頻率有關,前提是無刷直流電機是由多相脈沖供電;
2021-10-04 09:17:0016077 基于FPGA的無位置無刷直流電機控制系統設計(安徽力普拉斯電源技術有限公司招聘)-該文檔為基于FPGA的無位置無刷直流電機控制系統設計講解文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,
2021-09-24 16:24:5913 BLDC與PMSM關系關于這個問題,很多人不太注意,我見過很多人把無刷直流電機和永磁同步電機不區分,以至于出現了正弦波無刷直流電機這樣的叫法。實際上,在學校里面學習的時候,這個還是區分開的。一般把梯形波的無刷直流電機...
2021-12-29 18:51:2430 詳細介紹了無刷直流電機的運行原理及數學模型的基礎上,對反電勢過
零檢測法無位置傳感器控制的原理以及過零檢測電路的設計進行了詳細的分析和研
究.
2022-07-23 09:18:590 無刷直流電機組成部分:電機本體、位置傳感器、電子開關線路;
電機本體在結構上與永磁同步電動機相似;
2022-11-29 20:32:571998 機械與電子的科技發展,無刷直流電動機在社會生產生活中占據著越來越重要的地位,本著可塑性寬,工作穩定的特點,無刷直流電動機的使用也日益壯大。本設計是基于有位傳感器的無刷直流電機控制系統,通過無刷直流電機的工作原理,采用
2023-03-06 14:02:482317 無刷直流電動機利用電子開關線路和位置傳感器來代替有刷直流電機電刷和換向器,使其同時具有直流電動機和交流電動機的
優良特性。
無刷直流電機(驅動系統)主要由電動機本體、位置傳感器、電子開關線路三部分組成。
2023-03-08 13:50:580 本節介紹無刷直流電機的結構、工作原理本節介紹無刷直流電機的運行分析文章目錄 概述 無刷直流電動機的結構 位置傳感器 霍爾元件 無刷直流電機的工作原理 運行分析 通電狀態、磁狀態角 轉矩 轉向 動態
2023-03-08 11:55:1910 無刷直流電機取消了電刷和換向器,從而失去了機械的磁場換向機構,磁場換向通過傳感器檢測轉子位置,利用轉子的位置信息來控制由開關電子器件構成的換向電路來達到磁場換向的目
的。在無刷直流電機發展伊始
2023-03-08 13:46:162 無刷直流電機是指具有串勵直流電機起動特性和并勵直流電機調速特性的梯形波/方波直流電機。
基本結構由電機本體、功率驅動電路以及位置傳感器組成。無刷直流電機為實現無機械接觸式換相,取消了電刷。并將電樞
2023-03-08 11:37:311 檢測原理的不同,無刷直流電機無位置傳感器控制方法主要包括:反電動勢法、磁鏈法、電感法和人工智能法等。其中,
反電動勢法是目前技術最成熟、應用最廣泛的一種位置檢測方法。
2023-03-08 10:50:2519 無刷直流電機與有刷電機在外形、形狀上長著十分的相似,不仔細區分的話,很有可能出亂子。那么,如何從外觀上區別是無刷直流電機還是有刷直流電機呢?小編教你以下幾招: ?無刷直流電機區別方式一:看外觀,通常
2023-03-08 14:51:5010 無刷直流電機和有刷直流電機是兩種不同類型的直流電機。
2023-03-17 18:20:549844 無刷直流電機的有位置傳感器控制很多,但是無霍爾閉環控制在Simulink中很少見,通過對Simulink模型的認識,您將對無霍爾控制理解更加深刻
2023-07-13 09:45:052202 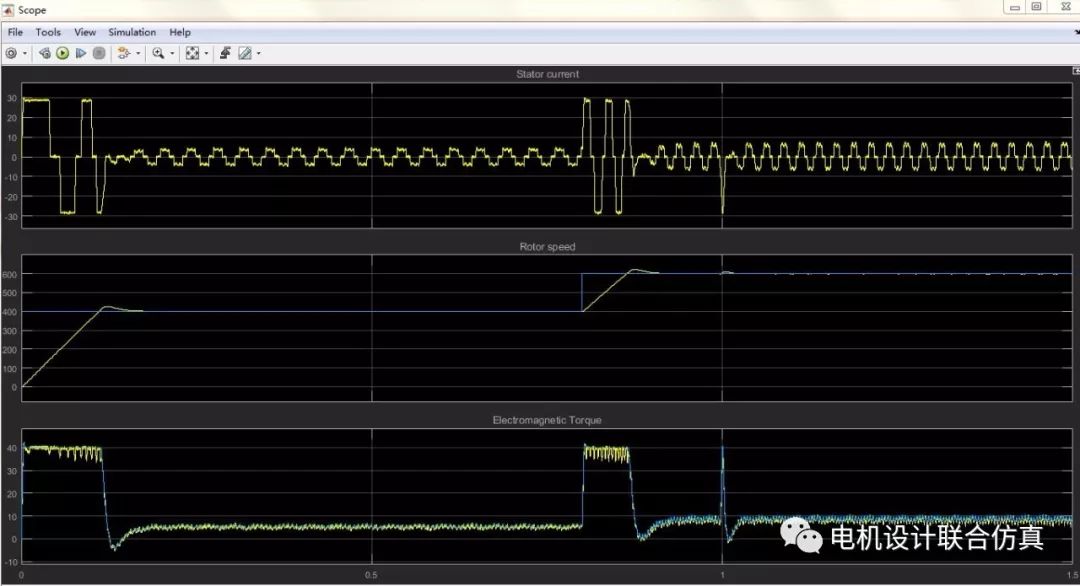
永磁無刷直流電機(BLDCM)因其高效率、高功率密度、低維護成本等優點,在電動汽車、航空航天、工業自動化等領域得到了廣泛應用。為了充分發揮永磁無刷直流電機的性能,采用合適的控制方法至關重要。本文將詳細介紹永磁無刷直流電機的控制方法,并分析其特點和應用場景。
2024-06-03 18:21:522912 電子發燒友網站提供《利用無刷直流電機簡化傳感器式電機控制.pdf》資料免費下載
2024-09-24 11:07:140
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論