要測(cè)量弱電流,就必須理解各種潛在的誤差源,這些誤差會(huì)造成人們所不希望出現(xiàn)的測(cè)量誤差。影響多種類(lèi)型的納米電子器件的測(cè)量結(jié)果的兩種極為常見(jiàn)的誤差源是摩擦生電效應(yīng)和電化
2012-01-04 17:09:25 1006
1006 
CCD光學(xué)測(cè)量系統(tǒng)原理
2012-07-20 22:57:56
圖是CCD圖像測(cè)量系統(tǒng)的結(jié)構(gòu)圖,它由圖像傳感器、攝像控制器、像素檢測(cè)器三個(gè)主要單元組成。光學(xué)成像裝置是光學(xué)圖像的采集部分,它將被測(cè)物體成像在CCD器件的光敏面上。攝像控制器的時(shí)基單元由晶體振蕩器
2018-11-15 15:06:23
利用CCD進(jìn)行光學(xué)測(cè)量,想知道ccd拍攝圖像的灰度值與相面上的照度和曝光時(shí)間有什么關(guān)系?知道了想灰度值、曝光時(shí)間等參數(shù)怎樣求得相面上的照度
2013-07-08 19:54:50
測(cè)量不確定度與誤差的區(qū)別測(cè)量不確定度和誤差是計(jì)量學(xué)中研究的基本命題,也是計(jì)量測(cè)試人員經(jīng)常運(yùn)用的重要概念之一。它直接關(guān)系著測(cè)量結(jié)果的可靠程度和量值傳遞的準(zhǔn)確一致。然而很多人由于概念不清,很容易將二者
2010-05-05 14:42:02
轉(zhuǎn)貼一、測(cè)量誤差的幾個(gè)名詞術(shù)語(yǔ)1.真值在一定的時(shí)間、空間條件下,被測(cè)量的大小是一個(gè)客觀存在的確定數(shù)值,即真值。真值是客觀存在的,但是不可測(cè)量的。隨著科學(xué)技術(shù)的不斷發(fā)展,人們對(duì)客觀事物認(rèn)識(shí)的不斷提高
2017-11-28 10:14:46
根據(jù)誤差的性質(zhì)不同,測(cè)量誤差分為系統(tǒng)誤差、偶然誤差和疏失誤差三類(lèi)。1、系統(tǒng)誤差系統(tǒng)誤差是指在相同的條件下,多次測(cè)量同一最值時(shí),誤差的絕對(duì)值和符號(hào)保持不變,或在條件改變時(shí)按一定規(guī)律變化的誤差。(1
2018-02-08 09:22:28
使用任何儀器進(jìn)行測(cè)量時(shí),都存在測(cè)量誤差。測(cè)量結(jié)果與測(cè)量的真值之間的差異,稱(chēng)為測(cè)量誤差。真值就是一個(gè)量所具有的真實(shí)數(shù)值。真值是一個(gè)理想概念,實(shí)際應(yīng)用中通常用實(shí)際值來(lái)替代真值。實(shí)際值是根據(jù)測(cè)量誤差的要求,用更高一級(jí)的標(biāo)準(zhǔn)器具測(cè)量所得之值。
2019-07-01 07:00:28
滾珠震動(dòng)開(kāi)關(guān)由于有著靈便且靈巧的促發(fā)性, 變成很多電子設(shè)備中必不可少的電子元器件。以電氣設(shè)備權(quán)威專(zhuān)家技術(shù)專(zhuān)業(yè)角度來(lái)剖析, 還是分成彈黃開(kāi)關(guān)與滾珠開(kāi)關(guān)兩類(lèi)看來(lái)。兩類(lèi)開(kāi)關(guān)常有2個(gè)較為關(guān)鍵的指標(biāo)值特點(diǎn)
2021-10-29 06:31:26
本帖最后由 zk294791 于 2017-9-21 09:37 編輯
同軸度就是定位公差,理論正確位置即為基準(zhǔn)軸線。同軸度是機(jī)械產(chǎn)品檢測(cè)中比較常見(jiàn)的一種形位公差項(xiàng)目,其表示零件的有關(guān)要素(軸
2017-09-21 09:24:28
11.3多功能形位誤差檢測(cè)儀設(shè)計(jì)本例所述的多功能形位誤差測(cè)量系統(tǒng)是基于LabVIEW軟件平臺(tái)設(shè)計(jì)的,可對(duì)軸類(lèi)零件的直線度、圓度、同軸度等形位誤差進(jìn)行測(cè)量,并且可以采用不同的方法自動(dòng)評(píng)定誤差,是一種
2019-05-16 09:40:11
本文將重點(diǎn)關(guān)注相電流測(cè)量引起的扭矩紋波。我們將對(duì)每種誤差進(jìn)行分析,并討論最大限度地減小測(cè)量誤差影響的方法。
2019-08-12 06:37:22
的傳動(dòng)及變換傳動(dòng)等特性,已成為近年來(lái)精密科技產(chǎn)業(yè)、滾珠絲桿升降機(jī)以及精密機(jī)械產(chǎn)業(yè)的定位及測(cè)量系統(tǒng)上的重要零組件之一。滾珠絲桿是一種鋼珠介于螺母與絲桿之間做運(yùn)動(dòng),將傳統(tǒng)絲桿的滑動(dòng)接觸轉(zhuǎn)換成滾動(dòng)接觸然后在
2018-10-29 10:40:14
的厚度,測(cè)厚儀是如何進(jìn)行有效精準(zhǔn)的測(cè)量的呢?下面,藍(lán)鵬測(cè)控為您解答: LPBH20.2止水帶測(cè)厚儀的底座、直線導(dǎo)軌副、滾珠絲杠副、C形架是測(cè)厚儀的支撐結(jié)構(gòu)件。底座與基礎(chǔ)固定,底座上面設(shè)置直線導(dǎo)軌、滾珠
2018-04-24 14:09:47
循環(huán)導(dǎo)管式、循環(huán)器式、端蓋式。預(yù)壓方式有定位預(yù)壓(雙螺母方式、位預(yù)壓方式)、定壓預(yù)壓。可根據(jù)用途選擇適當(dāng)類(lèi)型。絲杠有高精度研磨加工的精密滾珠絲杠(精度分為從C0-C7的6個(gè)等級(jí))和經(jīng)高精度冷軋加工成型
2016-08-17 17:02:05
有沒(méi)哪位高手可以做線陣CCD測(cè)量開(kāi)發(fā),可聯(lián)系。QQ:八五一五47九六九
2012-02-08 10:36:08
線性ccd測(cè)量系統(tǒng)是怎么用的?
2023-10-17 07:21:26
的評(píng)定 輸入量R、Rn彼此獨(dú)立不相關(guān),所以合成不確定度可按下式得到: U=k?uc=2×0.00151=0.003(Ω)五、測(cè)量不確定度的報(bào)告與表示 ETCR2000型鉗形接地電阻儀測(cè)量10Ω電阻的精度是(1%R+5字),相對(duì)示值誤差測(cè)量結(jié)果擴(kuò)展不確定度為0.3%。
2018-08-30 09:54:50
ETCR系列鉗形接地電阻測(cè)試儀是在傳統(tǒng)接地電阻測(cè)量技術(shù)上的重大突破,廣泛應(yīng)用于電力、電信、氣象、油田、建筑及工業(yè)電氣設(shè)備的接地電阻測(cè)量。那么鉗形接地電阻測(cè)試儀的原理是什么呢?
鉗形接地電阻測(cè)試儀測(cè)量
2024-01-02 10:45:01
顧名思義,銅螺母的定義就是使用銅材質(zhì)(一般是鉛黃銅,如H59,H62)制作的螺母. 我們?nèi)粘=佑|到的的銅螺母主要是六角螺母或是與螺栓相配的其它銅螺母。
2019-10-10 09:12:27
都有非常嚴(yán)格的執(zhí)行標(biāo)準(zhǔn)規(guī)范,所以對(duì)產(chǎn)品精度是會(huì)比較高。2.摩擦小,傳動(dòng)效率高絲杠軸與絲杠螺母之間有很多滾珠在做滾動(dòng)運(yùn)動(dòng),所以摩擦小,因此傳動(dòng)效率就會(huì)高。3.剛度高
2021-10-06 10:44:51
本文從工程應(yīng)用的角度出發(fā),在三個(gè)控制點(diǎn)構(gòu)成等腰三角形且僅考慮圖像坐標(biāo)檢測(cè)誤差的條件下,研究偏航角對(duì)P3P 位姿測(cè)量方法魯棒性的影響。首先在理論上推導(dǎo)出位姿參數(shù)誤差
2009-06-06 14:20:50 11
11 提出了一種以線陣CCD 固態(tài)傳感器取代讀數(shù)顯微鏡的航空相機(jī)鏡頭焦距測(cè)量系統(tǒng)。論述了系統(tǒng)的工作原理、軟件和硬件的設(shè)計(jì)及系統(tǒng)的測(cè)量誤差。結(jié)果表明,利用線陣固態(tài)圖像傳感器取
2009-06-25 10:27:4918 介紹了一種在結(jié)構(gòu)上不同于Op ton 的三維測(cè)量頭K該測(cè)頭采用折疊套裝雙片簧結(jié)構(gòu)K并設(shè)計(jì)了附加彈力增減裝置K使結(jié)構(gòu)小巧K固有頻率可變K適合于仿形加工和坐標(biāo)測(cè)量1[關(guān)鍵詞] 3D 測(cè)量
2009-07-09 15:18:1810 介紹一種新型的CCD 計(jì)數(shù)器, 它由CCD 傳感器、光學(xué)系統(tǒng)、計(jì)算機(jī)數(shù)據(jù)采集和處理系統(tǒng)組成。提出了靜態(tài)物品計(jì)數(shù)測(cè)量的基本原理, 通過(guò)實(shí)驗(yàn)數(shù)據(jù)分析, 找出影響測(cè)量精度的因素, 進(jìn)而給
2009-07-15 08:25:3528 第一節(jié) 長(zhǎng)度檢測(cè)概述第二節(jié) 尺寸測(cè)量第三節(jié) 形位誤差測(cè)量第四節(jié) 表面粗糙度測(cè)量第五節(jié) 線位移與距離測(cè)量第六節(jié) 物位檢測(cè)技術(shù)一、
2009-11-16 09:38:0626 現(xiàn)代測(cè)量誤差概念的內(nèi)涵與外延:]誤差和精度是測(cè)量平差與數(shù)據(jù)處理研究的最基本單元。文章對(duì)現(xiàn)代測(cè)量學(xué)科中的誤差重新進(jìn)行定義與分類(lèi),依據(jù)誤差的分類(lèi)對(duì)精度作更加明確而直觀
2010-01-08 18:14:467 機(jī)載三線陣CCD攝影測(cè)量的直接解算模型與精度分析
摘要:機(jī)載三線陣CCD 攝影測(cè)量系統(tǒng)是GPS/INS與三線陣CCD 相機(jī)聯(lián)合工作的測(cè)量系統(tǒng)。通過(guò)GPS/INS給出的投影中心位
2010-05-12 14:04:0410 提出一種基于CCD技術(shù)的鋼管長(zhǎng)度測(cè)量系統(tǒng)設(shè)計(jì)方案,分析了系統(tǒng)測(cè)量原理,詳細(xì)介紹了系統(tǒng)組成及其各部分功能硬件實(shí)現(xiàn):以FPGA作為中央處理器,線陣CCD器件TCD1206SUP作為光
2010-07-21 16:19:2029 人們?cè)谑褂?b class="flag-6" style="color: red">誤差理論的過(guò)程中,又發(fā)展出了不確定度概念,如何正確使用這兩個(gè)概念,是基層計(jì)量人員需要解決的問(wèn)題。測(cè)量誤差由于真值的不確定,所得誤差包含不確定因素。
2010-09-03 15:51:4614 測(cè)量誤差的分類(lèi)和測(cè)量結(jié)果的表征
3.2 測(cè)量誤差的估計(jì)和處理
3.3 測(cè)量不確定度
3.4 測(cè)量數(shù)據(jù)處理(有效數(shù)字的處理)
2010-09-07 15:53:109 摘要:相關(guān)匹配是目標(biāo)跟蹤和模式識(shí)別的一種重要方法。介紹了CCD(電荷耦合器件)誤差測(cè)量系統(tǒng)光學(xué)原理;針對(duì)該測(cè)量系統(tǒng)實(shí)際情況,提出了用相關(guān)算法實(shí)現(xiàn)目標(biāo)
2006-03-24 13:12:281322 
誤差的概念在一定條件下,被測(cè)量客觀存在的確定值,稱(chēng)為真值。誤差是測(cè)量值與真值相差的程度。誤差公理:測(cè)量的過(guò)程必然存在著誤差,誤差自始
2008-09-18 01:08:012554
1024位CCD驅(qū)動(dòng)電路
2009-02-06 00:22:201149 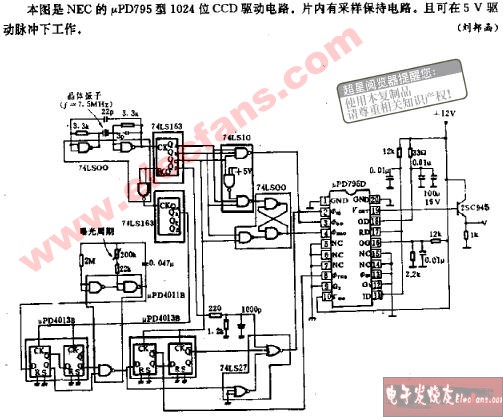
4096位CCD驅(qū)動(dòng)電路
2009-02-06 00:23:351050 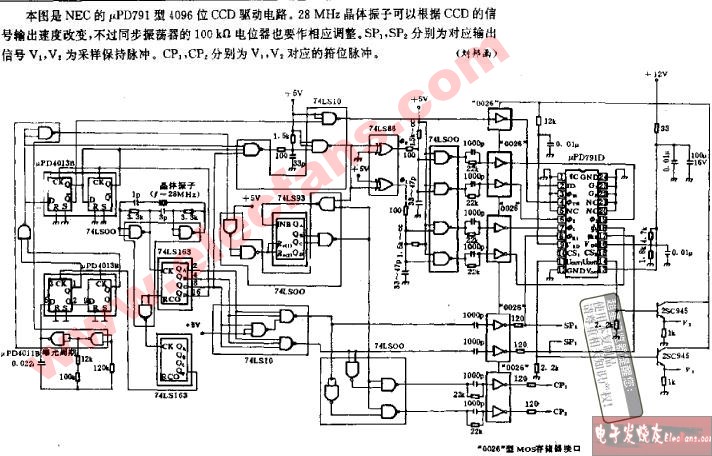
Novator零件形位公差尺寸影像測(cè)量儀將傳統(tǒng)影像測(cè)量與激光測(cè)量掃描技術(shù)相結(jié)合,采用大理石主體機(jī)臺(tái)和精密伺服控制系統(tǒng),可實(shí)現(xiàn)各種復(fù)雜零件的表面尺寸、輪廓、角度與位置、形位公差、3D空間形貌與尺寸結(jié)構(gòu)
2024-12-27 14:35:03
中圖儀器幾何形位公差三坐標(biāo)測(cè)量儀支持觸發(fā)探測(cè)系統(tǒng),能夠?qū)Ω鞣N零部件的尺寸、形狀及相互位置關(guān)系進(jìn)行檢測(cè)。不管是復(fù)雜的三維形狀還是細(xì)微的尺寸差異,每一次測(cè)量都能達(dá)到微米級(jí)精度,實(shí)現(xiàn)對(duì)產(chǎn)品質(zhì)量的嚴(yán)格把
2025-09-12 17:04:01
電子儀器的測(cè)量誤差
一般測(cè)量儀器的準(zhǔn)確度常用容許誤差來(lái)表示,它是根據(jù)技術(shù)條件的要求,規(guī)定某一類(lèi)儀器的誤差不應(yīng)超過(guò)的最大
2009-10-23 08:22:111958 倒車(chē)?yán)走_(dá)的測(cè)量誤差 測(cè)量誤差是指倒車(chē)?yán)走_(dá)測(cè)出的障礙物距離與實(shí)際障礙物距離的差異。在這里一般用
2010-01-04 14:04:251268 滾珠絲杠臨界速度是什么意思
長(zhǎng)軸形物體,比如絲杠,會(huì)因?yàn)橹亓Φ脑蛟谥胁啃纬上麓埂_@樣的長(zhǎng)軸兩端軸承支撐并旋轉(zhuǎn)的時(shí)候,拱形會(huì)增大。當(dāng)旋轉(zhuǎn)
2010-06-11 08:36:502494 零件的形位精度是零件的形狀精度和位置精度的簡(jiǎn)稱(chēng)。零件圖中的公差值體現(xiàn)了零件的設(shè)計(jì)精度,制造中的加工誤差反映了零件的加工精度,因此形位公差和形位誤差分別體現(xiàn)和反映了形位精度的設(shè)計(jì)和加工精度。
2011-01-16 23:30:05204 利用 線陣CCD 可以進(jìn)行一維無(wú)接觸微小尺寸的測(cè)量,具體方法是建立經(jīng)過(guò)衍射后的被測(cè)件尺寸與CCD視頻輸出的函數(shù)關(guān)系來(lái)達(dá)到對(duì)微小尺寸的高精度測(cè)量;并對(duì)該測(cè)量方法的誤差進(jìn)行了分析
2011-05-31 15:11:3799 基于平面近場(chǎng)天線測(cè)量的基本理論, 以半波偶極子陣列天線為模型, 利用數(shù)值分析的方法研究了平面近場(chǎng)天線測(cè)量中的有限掃描面截?cái)?b class="flag-6" style="color: red">誤差、位置誤差和暗室環(huán)境誤差對(duì)天線方向圖副瓣特
2011-06-21 17:45:3226 CCD立靶在應(yīng)用中,光幕對(duì)準(zhǔn)與靶距測(cè)量等都是現(xiàn)場(chǎng)布靶時(shí)人工操作完成,傳統(tǒng)的設(shè)備和方法精度較差,影響了系統(tǒng)的測(cè)量精度。通過(guò)研究操作不慎對(duì)測(cè)量精度的影響,將操作誤差轉(zhuǎn)化為
2011-08-29 14:55:490 針對(duì)室內(nèi)CCD交匯測(cè)量的試驗(yàn)環(huán)境,通過(guò)添加輔助光源照明,在基于CCD立靶測(cè)量原理的條件下,分析了室內(nèi)立靶影響捕獲率的原因,并建立了室內(nèi)立靶的捕獲率模型。該模型能夠?yàn)槭覂?nèi)立
2012-04-05 16:21:3544 51單片機(jī)32位心形流水燈內(nèi)含仿真圖,c程序,原理圖,仿真文件,效果圖等。
2016-03-22 16:41:2977 基于CCD的轉(zhuǎn)爐溫度測(cè)量方法研究_張巖
2017-01-18 20:23:582 使用任何儀器進(jìn)行測(cè)量時(shí),都存在測(cè)量誤差。測(cè)量結(jié)果與測(cè)量的真值之間的差異,稱(chēng)為測(cè)量誤差。真值就是一個(gè)量所具有的真實(shí)數(shù)值。真值是一個(gè)理想概念,實(shí)際應(yīng)用中通常用實(shí)際值來(lái)替代真值。實(shí)際值是根據(jù)測(cè)量誤差的要求
2017-11-23 15:51:183234 激光位移傳感器以其高精度、高效率、高可靠性等優(yōu)點(diǎn),應(yīng)用于精密零件的形位和位置公差的檢測(cè)中。CCD(電荷耦合器件)是激光位移傳感器的主要部件之一,其性能直接影響到系統(tǒng)的測(cè)量結(jié)果。只有符合激光位移傳感器
2018-01-24 14:12:430 S型熱電偶在使用過(guò)程中由于操作不當(dāng)或者其它干擾因素的影響,使得S型熱電偶容易出現(xiàn)誤差或者故障問(wèn)題,對(duì)測(cè)量結(jié)果有著直接的影響。為了提高S型熱電偶測(cè)量結(jié)果的準(zhǔn)確性,下面小編為大家介紹S型熱電偶出現(xiàn)測(cè)量誤差的原因。
2018-02-05 10:23:146447 形位公差包括形狀公差和位置公差。任何零件都是由點(diǎn)、線、面構(gòu)成的,這些點(diǎn)、線、面稱(chēng)為要素。機(jī)械加工后零件的實(shí)際要素相對(duì)于理想要素總有誤差,包括形狀誤差和位置誤差。這類(lèi)誤差影響機(jī)械產(chǎn)品的功能,設(shè)計(jì)時(shí)應(yīng)規(guī)定相應(yīng)的公差并按規(guī)定的標(biāo)準(zhǔn)符號(hào)標(biāo)注在圖樣上。形狀公差和位置公差簡(jiǎn)稱(chēng)為形位公差。
2019-06-26 13:55:109896 根據(jù)測(cè)量誤差的性質(zhì)(或出現(xiàn)的規(guī)律),產(chǎn)生的原因,測(cè)量誤差可分為系統(tǒng)誤差、隨機(jī)誤差和粗大誤差三類(lèi)。
2019-11-02 06:12:0076457 在測(cè)量時(shí),測(cè)量結(jié)果與實(shí)際值之間的差值叫誤差。真實(shí)值或稱(chēng)真值是客觀存在的,是在一定時(shí)間及空間條件下體現(xiàn)事物的真實(shí)數(shù)值,但很難確切表達(dá)。測(cè)得值是測(cè)量所得的結(jié)果。這兩者之間總是或多或少存在一定的差異,就是測(cè)量誤差。
2019-11-02 07:16:0030636 為了在精確測(cè)量中盡量消除誤差,標(biāo)定CCD相機(jī)在實(shí)際測(cè)量環(huán)境中的內(nèi)部參數(shù)有著重要的意義。
2020-03-21 11:58:0522 利用幾何成像原理建立起CCD雙目立體視覺(jué)測(cè)量系統(tǒng)的數(shù)學(xué)模型,從提高系統(tǒng)測(cè)量精度出發(fā),在理論上重點(diǎn)對(duì)系統(tǒng)結(jié)構(gòu)參數(shù)、圖像識(shí)別誤差與系統(tǒng)測(cè)量精度的關(guān)系進(jìn)行了深入的分析和探討,并通過(guò)實(shí)驗(yàn)對(duì)結(jié)論進(jìn)行了驗(yàn)證。研究?jī)?nèi)容對(duì)實(shí)際建立該測(cè)量系統(tǒng)具有很強(qiáng)的指導(dǎo)作用。
2020-03-30 13:52:065 三坐標(biāo)測(cè)量儀除了定位誤差,直線度誤差,角運(yùn)動(dòng)誤差,垂直度誤差這四個(gè)幾何誤差之外,還有由于力變形、熱變形、測(cè)量系統(tǒng)、測(cè)頭系統(tǒng)、控制系統(tǒng)、數(shù)據(jù)記錄和處理系統(tǒng)產(chǎn)生的誤差。
2020-05-15 10:36:397256 當(dāng)滾珠絲杠作為主動(dòng)體時(shí),螺母就會(huì)隨絲桿的轉(zhuǎn)動(dòng)角度按照對(duì)應(yīng)規(guī)格的導(dǎo)程轉(zhuǎn)化成直線運(yùn)動(dòng),被動(dòng)工件可以通過(guò)螺母座和螺母連接,從而實(shí)現(xiàn)對(duì)應(yīng)的直線運(yùn)動(dòng)。
2020-05-19 14:59:404476 測(cè)量不確定度,是近年來(lái)對(duì)測(cè)量結(jié)果的誤差表述。大家知道,任何測(cè)量都不可能絕對(duì)準(zhǔn)確,都必然有誤差,而誤差也不可能準(zhǔn)確知道。因此測(cè)量不確定度是對(duì)被測(cè)量的真值所處范圍的評(píng)定結(jié)果,所以在進(jìn)行測(cè)量的說(shuō)明和使用測(cè)量結(jié)果時(shí),都必須考慮測(cè)量不確定度。
2020-11-12 11:13:317274 動(dòng)態(tài)測(cè)量誤差修正原理與技術(shù)。
2021-03-23 09:31:1711 ◎滾珠絲桿是將回轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為直線運(yùn)動(dòng),或?qū)⒅本€運(yùn)動(dòng)轉(zhuǎn)化為回轉(zhuǎn)運(yùn)動(dòng)的理想的產(chǎn)品。 ?艾克姆螺桿 ◎滾珠絲桿由螺桿、螺母、鋼球、預(yù)壓片、反向器、防塵器組成。它的功能是將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化成直線運(yùn)動(dòng),這是艾克姆
2022-10-28 08:37:381511 的要求越來(lái)越高,如何確保工裝夾具的關(guān)鍵部位尺寸及形位公差符合精度標(biāo)準(zhǔn)要求,是擺在各類(lèi)生產(chǎn)型企業(yè)面前首要解決的難題。 本次服務(wù)案例是針對(duì)某款生產(chǎn)托輥的工裝夾具,測(cè)量其關(guān)鍵部位的尺寸及形位公差數(shù)據(jù),確保夾具的關(guān)鍵
2023-03-20 16:28:221339 
位公差。 形位公差包括形狀公差與位置公差,具體包括的內(nèi)容及公差如下圖所示: 位置度是多種形位公差形狀和位置公差中的一種,它的意思是被標(biāo)注對(duì)象在實(shí)際物體上的位置所允許出現(xiàn)的誤差范圍。一個(gè)孔的位置度是否符合要求
2023-03-23 11:34:551170 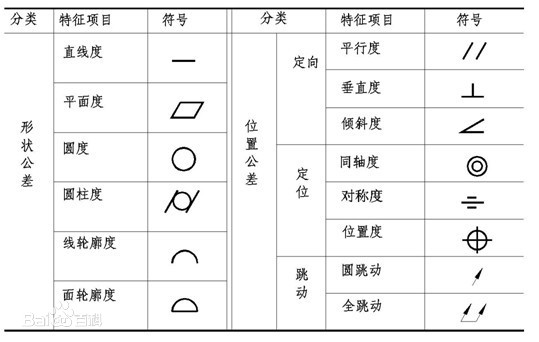
ccd影像測(cè)量儀測(cè)量操作全部由鼠標(biāo)操作,輕松學(xué)會(huì)操作員的所有實(shí)操過(guò)程,結(jié)合其自動(dòng)對(duì)焦和區(qū)域搜尋、目標(biāo)鎖定、邊緣提取、理匹選點(diǎn)的模糊運(yùn)算實(shí)現(xiàn)人工智能,可自動(dòng)修正由工件差異和走位差別導(dǎo)致的偏移實(shí)現(xiàn)準(zhǔn)確選點(diǎn),具有高精度重復(fù)性。
2022-09-28 11:34:444384 
LBB375TA-020位置傳感器測(cè)量探針中采用的線性滾珠軸承系統(tǒng)將徑向游隙降至分鐘級(jí)別,并將超精密測(cè)量產(chǎn)生的摩擦降至最低。 軸承裝配體采用兩列圓周排列微型滾珠。無(wú)旋轉(zhuǎn)的測(cè)量軸在滾珠上滑動(dòng)。測(cè)量軸
2023-05-26 11:17:34817 
一、技術(shù)原理影像儀是一種以光學(xué)成像為基礎(chǔ),采用CCD等圖象感應(yīng)器和DSP芯片處理圖像信號(hào)的精密測(cè)量儀器。它的精度和穩(wěn)定性受到影響的因素較多,如光源的穩(wěn)定性、鏡頭的質(zhì)量、CCD的像素分辨率以及DSP
2023-07-28 15:16:141988 
SJ5780雙向輪廓測(cè)量儀,其不僅能夠雙向測(cè)量,且融合多種功能。自動(dòng)測(cè)量方式減少了測(cè)量人員的工作量,另外,由于使用計(jì)算機(jī)作為數(shù)據(jù)的處理工具,使得測(cè)量結(jié)果的計(jì)算時(shí)間大大減少,,并且可以減少滾珠絲杠的單一或累積螺距誤差等測(cè)量結(jié)果一定程度上人為因素對(duì)計(jì)算結(jié)果的影響。在絲桿測(cè)量、螺紋測(cè)量上具有實(shí)用價(jià)值。
2022-10-25 09:22:411402 
滾珠螺桿如何安裝滾珠,這是一個(gè)非常專(zhuān)業(yè)的知識(shí),滾珠安裝在滾珠螺桿中,這是一個(gè)非常重要的問(wèn)題,如果不注重方法,對(duì)于設(shè)備的使用來(lái)說(shuō),都是不合理的。
2023-02-28 17:28:152089 
根據(jù)國(guó)家標(biāo)準(zhǔn),關(guān)于“導(dǎo)程”有3種定義:導(dǎo)程是滾珠螺母相對(duì)滾珠絲杠旋轉(zhuǎn)2π弧度時(shí)的行程。公稱(chēng)導(dǎo)程通常用作尺寸標(biāo)識(shí)的導(dǎo)程值(無(wú)公差)。目標(biāo)導(dǎo)程是根據(jù)實(shí)際使用需要提出的具有方向目標(biāo)要求的導(dǎo)程,一般這個(gè)導(dǎo)程值比公稱(chēng)導(dǎo)程稍小一點(diǎn),用來(lái)補(bǔ)償絲桿在工作時(shí)由于溫度上升和載荷引起的伸長(zhǎng)量。
2023-03-01 17:42:015502 
螺母加工工藝流程
2023-09-06 17:47:194440 
螺母就是螺帽,與螺栓或螺桿擰在一起用來(lái)起緊固作用的零件,螺母的用途十分廣泛,那么它的加工方法,你了解嗎?
2023-09-09 17:50:451783 
如何拆卸滾珠螺桿的螺母?
2023-09-11 17:53:151897 
螺母安裝滾珠的方法
2023-09-12 17:47:351982 
一、電氣測(cè)量誤差的形式 電氣測(cè)量誤差的形式分為絕對(duì)誤差、相對(duì)誤差和引用誤差三種。 1、絕對(duì)誤差 測(cè)量值與被測(cè)量真值之差稱(chēng)為絕對(duì)誤差。 令測(cè)量值為A x ,測(cè)量真值為A 0 ,絕對(duì)誤差為A Δ 。則A
2023-09-14 11:07:533720 滾珠螺桿的螺母朝向反了能用嗎?
2023-09-15 17:52:382139 
如何正確安裝滾珠螺桿螺母?
2023-09-18 17:53:171743 
滾珠螺母在自動(dòng)化機(jī)械設(shè)備中有不可替代的作用,應(yīng)用范圍極廣,如:機(jī)床制造領(lǐng)域、航空航天領(lǐng)域、汽車(chē)制造業(yè)領(lǐng)域、電子設(shè)備制造領(lǐng)域、物流輸送系統(tǒng)等領(lǐng)域
2023-09-21 17:51:131442 
滾珠螺母的清潔方式
2023-09-22 17:49:292559 
數(shù)控車(chē)床中滾珠螺母的維護(hù)保養(yǎng)方法
2023-10-05 17:36:521768 
滾珠螺母的生產(chǎn)流程
2023-10-08 17:48:141691 
滾珠螺母在工業(yè)機(jī)器人中的應(yīng)用優(yōu)勢(shì)
2023-10-11 17:46:371404 
滾珠螺母是一種高精度、高剛性的絲桿螺母機(jī)構(gòu),廣泛應(yīng)用在各種各樣的領(lǐng)域中,尤其是在機(jī)械傳動(dòng)中,有著大作用。
2023-11-03 17:44:471733 
滾珠絲杠是一種常見(jiàn)的機(jī)械設(shè)備,用于實(shí)現(xiàn)直線運(yùn)動(dòng)轉(zhuǎn)換為旋轉(zhuǎn)運(yùn)動(dòng),廣泛應(yīng)用于機(jī)床、自動(dòng)化設(shè)備、精密儀器等領(lǐng)域。它由螺紋軸和螺母組成,螺紋軸上布滿了滾珠,通過(guò)螺紋軸的旋轉(zhuǎn)產(chǎn)生運(yùn)動(dòng),使螺母上的滾珠運(yùn)動(dòng),從而
2024-01-19 14:26:502217 鎖緊螺母連接器具有鎖緊螺母(六角螺母),可擰到圓形連接器的螺紋上以安裝并固定電氣連接。
2024-01-24 17:05:201777 什么是鎖緊螺母連接器WhatareJamNutConnectors?了解連接器鎖緊螺母連接器具有鎖緊螺母(六角螺母),可擰到圓形連接器的螺紋上以安裝并固定電氣連接。鎖緊螺母連接器用于在擁擠的面板、墻壁或盒子中節(jié)省空間。它們還提高了穩(wěn)定性,使其成
2024-02-19 12:38:311336 
微型滾珠絲桿是一種用于傳遞動(dòng)力或控制運(yùn)動(dòng)的機(jī)械元件,它由一個(gè)螺旋形的凸起(絲桿)和一些小球(滾珠)組成。當(dāng)絲桿旋轉(zhuǎn)時(shí),滾珠被壓在絲桿的螺旋形凸起上,從而傳遞力和轉(zhuǎn)動(dòng)。
2024-05-04 17:33:221357 
滾珠螺桿,由螺桿、螺母、鋼球、預(yù)壓片、反向器和防塵器組成,是精密機(jī)床中必不可少的組件,也是工業(yè)界使用最廣泛的零組件之一。在長(zhǎng)期使用過(guò)程中,滾珠螺桿難免會(huì)發(fā)生失效或運(yùn)動(dòng)停止的情況,影響機(jī)械設(shè)備的正常運(yùn)行和最終產(chǎn)品品質(zhì)。
2024-06-15 17:54:461052 
導(dǎo)致滾珠脫落的原因有很多,像導(dǎo)軌底座不平整、導(dǎo)軌損壞、滑動(dòng)塊不正常等都會(huì)引起滾珠脫落。
2024-09-12 17:43:261456 
在機(jī)械工業(yè)中,經(jīng)常使用滾珠花鍵這種傳動(dòng)元件,人們經(jīng)常拿它與滾珠絲桿相比較,甚至與之混淆。
2024-09-20 17:53:011469 
滾珠絲桿在精密機(jī)械傳動(dòng)和定位系統(tǒng)中扮演著關(guān)鍵角色,滾珠絲桿誤差是指滾珠絲桿在制造過(guò)程中產(chǎn)生的一些不可避免的誤差。
2024-12-23 17:49:421129 
直線導(dǎo)軌測(cè)量誤差的原因是多方面的,需要綜合考慮各種因素并采取相應(yīng)的措施來(lái)減小誤差。
2025-01-18 17:45:01888 
測(cè)量誤差是指測(cè)量結(jié)果與被測(cè)量的真實(shí)值之間的差異,測(cè)量誤差越大,測(cè)量結(jié)果的可靠性越低。本文將探討示波器設(shè)置不當(dāng)時(shí)誤差是如何產(chǎn)生的、其典型的表現(xiàn),以及如何使用示波器設(shè)置減小測(cè)量誤差。示波器的測(cè)量誤差
2025-07-02 14:20:06730 
?** 引言?**? 在現(xiàn)代科學(xué)實(shí)驗(yàn)和技術(shù)應(yīng)用中,測(cè)量是基礎(chǔ)環(huán)節(jié),但不可避免的誤差會(huì)扭曲真實(shí)數(shù)據(jù)。誤差通常分為系統(tǒng)誤差(恒定偏差)和隨機(jī)誤差(隨機(jī)波動(dòng)),理解其溯源和分離至關(guān)重要。系統(tǒng)誤差源于設(shè)備
2025-07-25 09:36:16857 滾珠絲桿與螺母之間的配合間隙因磨損或調(diào)整不當(dāng)而增大,支撐軸承的間隙過(guò)大,導(dǎo)致絲桿在運(yùn)動(dòng)過(guò)程中產(chǎn)生軸向竄動(dòng)。
2025-09-15 17:58:22827 
在精密機(jī)械傳動(dòng)領(lǐng)域,減速機(jī)、滾珠絲杠和同步帶是三種核心傳動(dòng)元件,其誤差特性直接影響設(shè)備定位精度和運(yùn)動(dòng)控制性能。本文將從傳動(dòng)原理、誤差來(lái)源、應(yīng)用場(chǎng)景等維度展開(kāi)對(duì)比分析,幫助工程師根據(jù)實(shí)際需求選擇最優(yōu)
2025-11-13 17:13:12589 滾珠花鍵與滾珠導(dǎo)軌的機(jī)械性能區(qū)別
2026-01-05 18:01:22122 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論