運(yùn)動(dòng)控制起源于早期的伺服控制,本文與讀者分享的是運(yùn)動(dòng)控制的定義、運(yùn)動(dòng)控制系統(tǒng)的基本架構(gòu)組成以及在運(yùn)動(dòng)控制方面幾項(xiàng)運(yùn)動(dòng)所需控制軌跡等
2013-04-07 10:47:25 4311
4311 隨著RFID更深入的應(yīng)用,醫(yī)療領(lǐng)域又對(duì)其提出了更具有挑戰(zhàn)性的需求:追蹤手術(shù)器械,避免手術(shù)器械被遺失在病人體內(nèi)導(dǎo)致嚴(yán)重的醫(yī)療事故和并發(fā)癥。
2013-12-03 09:41:031138 運(yùn)動(dòng)控制系統(tǒng)
2013-08-15 09:37:04
運(yùn)動(dòng)控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
1.運(yùn)動(dòng)控制系統(tǒng)組成1)人機(jī)接口2)運(yùn)動(dòng)控制器3)驅(qū)動(dòng)器4)執(zhí)行器5)傳動(dòng)機(jī)構(gòu)6)反饋2.運(yùn)動(dòng)曲線1)梯形速度曲線梯形曲線比較簡單,但是梯形尖角會(huì)導(dǎo)致加速度不連續(xù),對(duì)系統(tǒng)產(chǎn)生極大的沖擊。2)S型速度
2021-09-01 07:52:50
運(yùn)動(dòng)控制系統(tǒng)(陳伯時(shí))
2020-04-02 11:05:13
脈動(dòng)真空滅菌是國內(nèi)九十年代中期發(fā)展的一種新型滅菌設(shè)備,由于采用了脈動(dòng)真空技術(shù),滅菌效果好,廣泛應(yīng)用于醫(yī)院供應(yīng)室、手術(shù)室、制藥廠及科研部門。基于PLC的控制系統(tǒng)具有運(yùn)行可靠、操作簡單、維護(hù)簡便等
2018-09-17 17:19:49
要給實(shí)驗(yàn)室的工業(yè)CCD相機(jī),科學(xué)CCD相機(jī),電動(dòng)平移臺(tái)設(shè)計(jì)一個(gè)時(shí)序控制系統(tǒng)。大體要求就是相機(jī)拍照完后,電動(dòng)平移臺(tái)平移,然后相機(jī)繼續(xù)拍照。但是我目前只有幾個(gè)器件的說明書。如果用LABVIEW做話,該從
2012-04-24 22:05:02
:該項(xiàng)目最初是由日本某國立大學(xué)主導(dǎo)的,研究期間與北京某醫(yī)院進(jìn)行遠(yuǎn)程血管介入手術(shù)訓(xùn)練操作(CCTV科技頻道有報(bào)道),并取得初步性進(jìn)展,目前與我校進(jìn)行共同研究,期望在血管介入手術(shù)方面取得更大的進(jìn)展。
2015-07-06 10:59:19
作者:MiTu_-_課程:運(yùn)動(dòng)控制系統(tǒng)參考書目:《自動(dòng)控制系統(tǒng)》第二版 北京郵電大學(xué)任彥碩 趙一丁運(yùn)動(dòng)控制系統(tǒng)一、課后習(xí)題二、直流調(diào)速三、變流調(diào)速四、簡答一、課后習(xí)題U1 緒論自動(dòng)控制系統(tǒng)結(jié)構(gòu)七個(gè)
2021-06-30 06:56:58
在醫(yī)療領(lǐng)域手術(shù)器械回流流程中應(yīng)用RFID系統(tǒng)技術(shù)具有很強(qiáng)的獨(dú)創(chuàng)性,本系統(tǒng)建成后,將滿足手術(shù)醫(yī)療器械回流流程業(yè)務(wù)不斷變化和發(fā)展的需要,從根本上扭轉(zhuǎn)手術(shù)包流程管理的被動(dòng)局面,改善醫(yī)院在手術(shù)器械消毒管理
2019-09-19 08:13:40
文章目錄第1章 緒論第2章 運(yùn)動(dòng)曲線2.0 引言2.1 運(yùn)動(dòng)學(xué)的基本概念2.2 常見運(yùn)動(dòng)曲線2.2.1 梯形速度曲線2.2.2 S 形速度曲線第3章 傳動(dòng)鏈設(shè)計(jì)第1章 緒論什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)
2021-09-01 07:06:21
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
外來醫(yī)療器械是指由器械供應(yīng)商租借給醫(yī)院可重復(fù)使用,還要用于植入物相關(guān)的手術(shù)器械,由于外來醫(yī)療器械具有精密度高,專業(yè)性強(qiáng),結(jié)構(gòu)復(fù)雜,價(jià)格昂貴,更新?lián)Q代快,類型品規(guī)繁多等特點(diǎn),租借外來醫(yī)療器械是現(xiàn)今醫(yī)院
2020-02-18 10:15:28
個(gè)“蛇頭”(內(nèi)安裝有攝像頭和一些手術(shù)器械)。其“蛇身”則由若干節(jié)可自由彎曲的部件構(gòu)成,總長為300mm,“蛇頭”、“蛇身”的直徑為12mm。據(jù)研制者介紹,該蛇形機(jī)器人適合做各種血管手術(shù),尤其是復(fù)雜
2011-03-01 10:27:46
摘 要:本文主要針對(duì)鼻實(shí)炎手術(shù)過程中動(dòng)力需求的特點(diǎn),設(shè)計(jì)了一款基于 DSPI060I5 芯片同時(shí)控制 BIDC 和直流有刷電機(jī)的電機(jī)控制系統(tǒng)。BIDC 能實(shí)現(xiàn)正轉(zhuǎn)、反轉(zhuǎn)、擺動(dòng)、定位、急停、轉(zhuǎn)速調(diào)節(jié)
2025-07-25 14:23:23
無線射頻識(shí)別技術(shù),可以通過射頻識(shí)別信號(hào)對(duì)目標(biāo)對(duì)象進(jìn)行自動(dòng)識(shí)別,獲取數(shù)據(jù)信息,可在任何環(huán)境下進(jìn)行識(shí)別工作,具有一定的應(yīng)用價(jià)值和前景。 在醫(yī)院手術(shù)器械中,采用無線識(shí)別技術(shù),可以有效的對(duì)手術(shù)器械進(jìn)行自適應(yīng)
2023-09-18 08:53:35
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
如何實(shí)現(xiàn)基于STM32F103懸掛運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)?
2021-12-23 06:47:52
運(yùn)動(dòng)控制系統(tǒng)被廣泛地運(yùn)用于各個(gè)領(lǐng)域。傳統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
控制系統(tǒng)的精確控制是非常困難的。靠改變懸掛被控對(duì)象的繩索長短來控制被控對(duì)象運(yùn)動(dòng)軌跡的懸掛運(yùn)動(dòng)控制系統(tǒng),在生產(chǎn)控制等領(lǐng)域有很廣的應(yīng)用范圍,但受技術(shù)上的制約,使用也有一定限制。
2019-08-12 08:21:38
通常用什么辦法來評(píng)估一個(gè)運(yùn)動(dòng)控制系統(tǒng)的動(dòng)態(tài)響應(yīng)速度
2023-10-13 07:12:55
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
怎樣去搭建一個(gè)基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)?基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
模型電動(dòng)汽車系統(tǒng)是怎樣構(gòu)成的?怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
2021-05-13 06:19:27
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
目前眼部醫(yī)療器械嵌入式控制系統(tǒng)用linux還是安卓
2022-03-13 08:56:25
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
試驗(yàn)車運(yùn)動(dòng)控制系統(tǒng)包含S7200 PLC程控器和兩套伺服控制系統(tǒng)(一套控制車體、一套控制電纜盤)。車體控制系統(tǒng)為速度控制模式,電纜盤控制系統(tǒng)為轉(zhuǎn)矩控制模式。S7200 PLC和兩套伺
2009-06-16 10:53:19 17
17 ?口腔手術(shù)器械連接牢固度測試儀主要應(yīng)用于測試穿刺器,腹部穿刺器,鑷子,采血器針,口腔手術(shù)器械,呼吸管路,縫合針線,集尿袋,導(dǎo)入管,擴(kuò)張器,導(dǎo)引導(dǎo)管絲,隱形眼鏡等產(chǎn)品斷裂力和連接牢固強(qiáng)度試驗(yàn)。是一次性
2023-03-10 13:56:00
為了滿足CNC齒輪測量中心的測量精要求,針對(duì)定點(diǎn)數(shù)字信號(hào)處理器(DSP)TMS320LF2407A的特點(diǎn),設(shè)計(jì)一種以DSP運(yùn)動(dòng)控制為核心的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)通過DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊對(duì)傳
2010-02-11 12:23:3379 如何設(shè)計(jì)運(yùn)動(dòng)控制系統(tǒng)
本內(nèi)容主要包括直流調(diào)速、交流調(diào)速和隨動(dòng)系統(tǒng)三部分。直流調(diào)速部分主要介紹單閉環(huán)、雙閉環(huán)直流調(diào)速系統(tǒng)和以全控型功率器件為主的
2010-03-31 15:30:389 一、儀器概述導(dǎo)絲推送力測試儀通過模擬真實(shí)手術(shù)場景中的導(dǎo)絲推送過程,為醫(yī)生、器械研發(fā)人員及制造商提供準(zhǔn)確、客觀的評(píng)估依據(jù)。它廣泛應(yīng)用于心血管介入手術(shù)、神經(jīng)外科介入手術(shù)等領(lǐng)域,對(duì)確保手術(shù)
2024-08-19 15:57:39
運(yùn)動(dòng)控制系統(tǒng)抗干擾分析
運(yùn)動(dòng)控制系統(tǒng)作為一些自動(dòng)化設(shè)備的核心部分,其可靠性和穩(wěn)定性直接影響設(shè)備的性能,而影響其可靠性和穩(wěn)定性的主要因素之一是抗干擾
2009-05-13 09:07:16849 我國微創(chuàng)手術(shù)器械發(fā)展快 研發(fā)形勢喜人
微創(chuàng)手術(shù)是醫(yī)學(xué)界跨世紀(jì)的高新外科學(xué)成就之一。與外科手術(shù)相比,微創(chuàng)手術(shù)的優(yōu)勢在于其可大大減少手術(shù)創(chuàng)口面積、避免體內(nèi)
2009-11-12 17:02:491080 一項(xiàng)可以在手術(shù)過程中追蹤海綿和手術(shù)器械的新技術(shù)近日獲得了美國食品及藥物管理局的(FDA)批準(zhǔn)。
位于美國的Haldor先進(jìn)技術(shù)公司開發(fā)了ORLocate系統(tǒng)
2010-09-14 10:23:13937 本文對(duì)運(yùn)動(dòng)控制系統(tǒng)中的幾種上位控制單元方案-單片機(jī)系統(tǒng),專業(yè)運(yùn)動(dòng)控制 PLC ,PC+運(yùn)動(dòng)控制卡,專用控制系統(tǒng)分別加以說明,并詳盡地論述PC+運(yùn)動(dòng)控制卡方案。
2011-07-22 16:55:4528 為了降低研發(fā)成本,減輕微控制器的壓力,提高系統(tǒng)的穩(wěn)定性和靈活性,提出了一種基于專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)方案。該運(yùn)動(dòng)控制系統(tǒng)中主要采用了微控制器AT90CA
2012-05-30 15:08:3157 電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)
2015-11-10 11:01:444 懸掛運(yùn)動(dòng)控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 11:59:1428 運(yùn)動(dòng)控制系統(tǒng)課件,對(duì)于運(yùn)動(dòng)控制系統(tǒng)這門課程,里面的課件進(jìn)行一一解剖分析,只為讓你們更好地掌握這門課程
2016-06-15 15:53:570 現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)的發(fā)展概況與趨勢的綜述。
2016-06-17 16:00:445 風(fēng)力擺運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)_張國軍
2017-03-19 19:04:2312 基于STM32的綠激光手術(shù)儀控制系統(tǒng)的設(shè)計(jì)
2017-09-25 11:04:3311 DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2017-10-19 14:58:4212 運(yùn)動(dòng)控制系統(tǒng)的定義 運(yùn)動(dòng)控制系統(tǒng)(Motion Control System)也可稱作電力拖動(dòng)控制系統(tǒng)(Control Systems of Electric Drive) 運(yùn)動(dòng)控制系統(tǒng)--通過
2017-11-09 11:35:2414 自由擺控制系統(tǒng)在基礎(chǔ)物理研究、仿人智能控制、工程機(jī)械車輛、高層建筑結(jié)構(gòu)控制、醫(yī)療手術(shù)器械等領(lǐng)域有著重要的應(yīng)用。
2018-04-25 09:37:4410 本文首先介紹了伺服運(yùn)動(dòng)控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動(dòng)控制系統(tǒng)工作原理,最后從機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì)、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計(jì)三個(gè)方面來詳細(xì)介紹機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3617071 近日,一項(xiàng)針對(duì)9家三甲醫(yī)院10臺(tái)內(nèi)窺鏡手術(shù)器械控制系統(tǒng)(俗稱手術(shù)機(jī)器人)的臨床應(yīng)用評(píng)估結(jié)果出爐。該研究由國家衛(wèi)生健康委員會(huì)衛(wèi)生發(fā)展研究中心完成。結(jié)果顯示,其使用情況存在技術(shù)應(yīng)用差異,建議有關(guān)部門加強(qiáng)技術(shù)規(guī)范化管理和質(zhì)量控制,調(diào)整定價(jià)收費(fèi)政策。
2018-08-06 16:14:002533 采用光學(xué)傳感器可以進(jìn)行無接觸式測量和采集信息,但是普通光學(xué)傳感器靈敏度較小,對(duì)采集物體的表面也有很高的要求,對(duì)小型精細(xì)物體如導(dǎo)管、導(dǎo)絲等的運(yùn)動(dòng)信息采集不夠精確,所以經(jīng)過對(duì)比,本文使用激光位移傳感器芯片ADNS-7530,進(jìn)行無接觸式測量,測量精度、耐用性、靈活性等方面得到了很大的提高。
2018-09-23 09:15:005793 
獲悉,當(dāng)?shù)貢r(shí)間2018年10月23日,骨科巨頭Stryker宣布以1.90億美元完成了對(duì)Invuity的收購。同時(shí),Invuity用于微創(chuàng)手術(shù)的一次性可視化手術(shù)器械也被Stryker納入其產(chǎn)品組合。此前,雙方已在9月11日時(shí)宣布達(dá)成收購協(xié)議。
2018-10-30 15:59:363437 Identification,簡稱UDI)。作為全球知名的電子元器件和解決方案廠商,村田制作所(以下簡稱“村田”)適時(shí)推出為該應(yīng)用特殊設(shè)計(jì)和制造的UHF RFID標(biāo)簽,為規(guī)范醫(yī)療手術(shù)器械唯一標(biāo)識(shí)系統(tǒng)建設(shè),加強(qiáng)手術(shù)器械全生命周期管理提供獨(dú)特產(chǎn)品,助力中國醫(yī)用物聯(lián)網(wǎng)的發(fā)展。
2019-10-11 11:36:005315 日前,我國首例機(jī)器人輔助全腦血管造影手術(shù)在首都醫(yī)科大學(xué)附屬北京天壇醫(yī)院成功實(shí)施。據(jù)悉本次參與手術(shù)的機(jī)器人名為“魯班”,是一款專注于微創(chuàng)血管介入手術(shù)的機(jī)器人,由我國自主研發(fā)。
2020-01-06 11:37:251850 目前“魯班”的操作距離僅限于手術(shù)室外操作,隨著5G技術(shù)的發(fā)展,未來血管介入機(jī)器人或許可以實(shí)現(xiàn)跨地區(qū)手術(shù)。日前,我國首例機(jī)器人輔助全腦血管造影手術(shù)在首都醫(yī)科大學(xué)附屬北京天壇醫(yī)院成功實(shí)施。
2020-01-06 15:40:513070 醫(yī)院采用RFID技術(shù)將全方位對(duì)手術(shù)器械進(jìn)行自動(dòng)化管控,減少了人工清點(diǎn)托盤和器械,取而代之的是通過RFID讀寫器自動(dòng)采集讀取范圍內(nèi)的帶有RFID電子標(biāo)簽的器械。
2020-03-17 08:46:581331 醫(yī)療行業(yè)在選擇材料時(shí)需要綜合多方面因素考慮。畢竟,醫(yī)療事故關(guān)系人命,錯(cuò)誤的材料選擇會(huì)導(dǎo)致災(zāi)難性的后果。在這篇文章中,我們將分析哪些材料更適合用于外科手術(shù)器械制作以及合適的原因。
2020-03-28 11:59:2722158 醫(yī)院門診中的診室是最忙碌最重要的單位之一,手術(shù)器械做為手術(shù)治療的關(guān)鍵專用工具,在手術(shù)治療的全過程中,手術(shù)器械假如保證合理管控便是醫(yī)院門診必須考慮到的關(guān)鍵難題。
2020-04-19 21:56:02793 本文檔的主要內(nèi)容詳細(xì)介紹的是電力拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)的學(xué)習(xí)課件免費(fèi)下載。
2020-06-11 08:00:008 本文檔的主要內(nèi)容詳細(xì)介紹的是電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)的資料簡介包括了:運(yùn)動(dòng)控制系統(tǒng)及其組成,運(yùn)動(dòng)控制系統(tǒng)的歷史與發(fā)展,運(yùn)動(dòng)控制系統(tǒng)轉(zhuǎn)矩控制規(guī)律,生產(chǎn)機(jī)械的負(fù)載轉(zhuǎn)矩特性。
2020-06-11 08:00:004 門診和手術(shù)室都是醫(yī)院最繁忙的地方,每天有不同的人進(jìn)進(jìn)出出,各種醫(yī)療設(shè)各和耗材也會(huì)時(shí)時(shí)消耗和補(bǔ)給,這些工作由專的部門負(fù)責(zé),他們要確保手術(shù)從準(zhǔn)備到實(shí)施的每一個(gè)環(huán)節(jié)都沒有差錯(cuò),使用的所有器械和設(shè)各都進(jìn)行了嚴(yán)格的消毒。
2020-07-16 10:25:000 近日,中國科學(xué)院蘇州生物醫(yī)學(xué)工程技術(shù)研究所高欣團(tuán)隊(duì)提出一種融合區(qū)域分割思想與目標(biāo)搜索策略的輕量型目標(biāo)提取神經(jīng)網(wǎng)絡(luò)架構(gòu),構(gòu)建一種全自動(dòng)無標(biāo)記手術(shù)器械視覺追蹤方法。
2020-07-31 16:57:502339 血管介入是在醫(yī)學(xué)影像設(shè)備的導(dǎo)引下,利用穿刺針,導(dǎo)絲,導(dǎo)管等器械經(jīng)血管途徑進(jìn)行診斷與治療的操作技術(shù)。
2020-11-02 11:01:284338 介入醫(yī)療器械是近十幾年來迅速發(fā)展起來的新興的醫(yī)療器械領(lǐng)域,采用介入醫(yī)療器械開展的微創(chuàng)介入手術(shù)代表了醫(yī)療技術(shù)的發(fā)展方向。在心腦血管介入器械方面,以冠脈支架(藥物洗脫支架)為代表的介入器械已經(jīng)在全世界
2020-11-10 09:15:292399 介入醫(yī)療器械是近十幾年來迅速發(fā)展起來的新興的醫(yī)療器械領(lǐng)域,采用介入醫(yī)療器械開展的微創(chuàng)介入手術(shù)代表了醫(yī)療技術(shù)的發(fā)展方向。
2020-11-10 09:45:311768 “介入機(jī)器人手術(shù)的成功,可能預(yù)示著推動(dòng)血管介入領(lǐng)域的革命性進(jìn)展。” 中國科學(xué)醫(yī)學(xué)院阜外醫(yī)院血管外科中心副主任醫(yī)師羅明堯說。 3 月 13 日,機(jī)器人輔助冠狀動(dòng)脈介入治療(PCI
2021-03-29 17:38:453333 基于STFT的微創(chuàng)手術(shù)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
2021-06-16 10:58:2118 什么是介入C形臂?介入C形臂在業(yè)界俗稱為“中C”,由于把它的球管功率提高,使得介入C形臂在系統(tǒng)性和操控性上得到很大的提升,能夠有效的幫助醫(yī)生開展復(fù)雜介入手術(shù)。主要應(yīng)用在腰椎間盤介入、頸椎介入、婦科輸卵管再造手術(shù)、子宮肌瘤手術(shù)等。隨著介入C形臂不斷的更新和發(fā)展,它的臨床應(yīng)用范圍也在繼續(xù)擴(kuò)展中。
2021-06-16 13:54:571544 基于北斗導(dǎo)航的無人艇運(yùn)動(dòng)導(dǎo)航控制系統(tǒng)
2021-06-30 15:13:1514 電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)電子版
2021-07-16 10:46:180 外科醫(yī)生坐在無菌區(qū)外的手術(shù)控制臺(tái),通過觀察放置在患者體內(nèi)的腔鏡所傳輸?shù)挠跋駚聿倏貦C(jī)械臂、手術(shù)器械及腔鏡的移動(dòng),為患者實(shí)施手術(shù)。 ? 隨著無線通信技術(shù)的發(fā)展,除了應(yīng)用于精細(xì)操作的手術(shù)之外,近年來,手術(shù)機(jī)器人還開始應(yīng)
2022-09-01 17:26:131551 X 射線 C 形臂、移動(dòng)式 X 射線 C 形臂一體機(jī)、介入機(jī)器人等多條介入產(chǎn)品線。 唯邁醫(yī)療 在介入手術(shù)機(jī)器人研 發(fā)領(lǐng)域走在世界 前 列 ,成 為國際僅有的五家介入手術(shù)機(jī)器人產(chǎn)研公司之一,在國際機(jī)器人領(lǐng)域 首創(chuàng)發(fā)明專利數(shù)全球第二。 通過?
2023-02-15 16:10:051079 研發(fā)團(tuán)隊(duì)表示,這進(jìn)一步驗(yàn)證了全新一代微創(chuàng)血管介入手術(shù)機(jī)器人在臨床階段應(yīng)用的安全性、穩(wěn)定性、有效性,為推廣該機(jī)器人進(jìn)入臨床應(yīng)用奠定堅(jiān)實(shí)基礎(chǔ),實(shí)現(xiàn)了微創(chuàng)介入手術(shù)機(jī)器人里程碑式的突破。
2023-02-26 09:00:352445 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來講,運(yùn)動(dòng)的要素可
2023-04-21 18:02:142384 運(yùn)動(dòng)控制系統(tǒng)開發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:191453 目前手術(shù)機(jī)器人多用于骨科手術(shù)、神經(jīng)外科、血管介入治療機(jī)器人等手術(shù)中的輔助定位、造影建模或者是開刀等場景,通常由床旁機(jī)械臂系統(tǒng)、控制臺(tái)和可視化系統(tǒng)等組成。
2023-05-17 10:40:59467 的考慮,比如,非接觸式、清潔的、無飛濺、無粉塵的、高效的等等,這些都是全符合塑料醫(yī)療配件的焊接要求的。但在眾多的焊接技術(shù)中,能同時(shí)滿足這些條件的有激光焊接技術(shù)。下面介紹激光焊接技術(shù)在焊接外科微創(chuàng)手術(shù)器械的優(yōu)點(diǎn)。
2023-06-01 14:50:16764 無刷伺服電機(jī)在醫(yī)療器械領(lǐng)域有廣泛的應(yīng)用。以下是一些常見的醫(yī)療器械中使用無刷伺服電機(jī)的例子: (1)手術(shù)器械:無刷伺服電機(jī)可以用于手術(shù)器械中的驅(qū)動(dòng)系統(tǒng),如手術(shù)機(jī)器人、手術(shù)鉗、剝離器等。這些器械需要
2023-07-06 08:05:011725 1.運(yùn)動(dòng)控制為數(shù)控機(jī)床、機(jī)器人等高端裝備“大腦” 1.1 運(yùn)動(dòng)控制系統(tǒng)是數(shù)控機(jī)床、機(jī)器人等高端裝備高效運(yùn)行核心環(huán)節(jié) 運(yùn)動(dòng)控制系統(tǒng)是依照具體的運(yùn)動(dòng)軌跡要求,根據(jù)負(fù)載情況,通過驅(qū)動(dòng)器、驅(qū)動(dòng)執(zhí)行電機(jī)完 成
2023-07-07 11:17:503381 
國產(chǎn)達(dá)芬奇Xi手術(shù)系統(tǒng)的面世有助于將優(yōu)質(zhì)手術(shù)醫(yī)療器械資源向更多醫(yī)院普及,其集成了三維高清視野、可轉(zhuǎn)腕手術(shù)器械和直覺式動(dòng)作控制三大特性,將外科醫(yī)生手部動(dòng)作的顫抖等自動(dòng)濾除并轉(zhuǎn)換成更精準(zhǔn)的動(dòng)作,其彎曲及旋轉(zhuǎn)程度遠(yuǎn)超人手極限,讓機(jī)器人輔助手術(shù)變成了現(xiàn)實(shí)。
2023-10-12 14:31:412615 運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來講,運(yùn)動(dòng)的要素可概況為
2023-10-25 08:07:523419 
運(yùn)動(dòng)控制系統(tǒng)是通過控制電機(jī)電壓、電流、頻率等輸入量,來滿足工作機(jī)械的轉(zhuǎn)矩、速度、位移等機(jī)械量,使各種工作機(jī)械按照人們期望的要求運(yùn)行,以滿足生產(chǎn)及應(yīng)用的需要。 運(yùn)動(dòng)控制系統(tǒng)由電機(jī)、功率變換裝置、控制
2023-11-14 15:54:202588 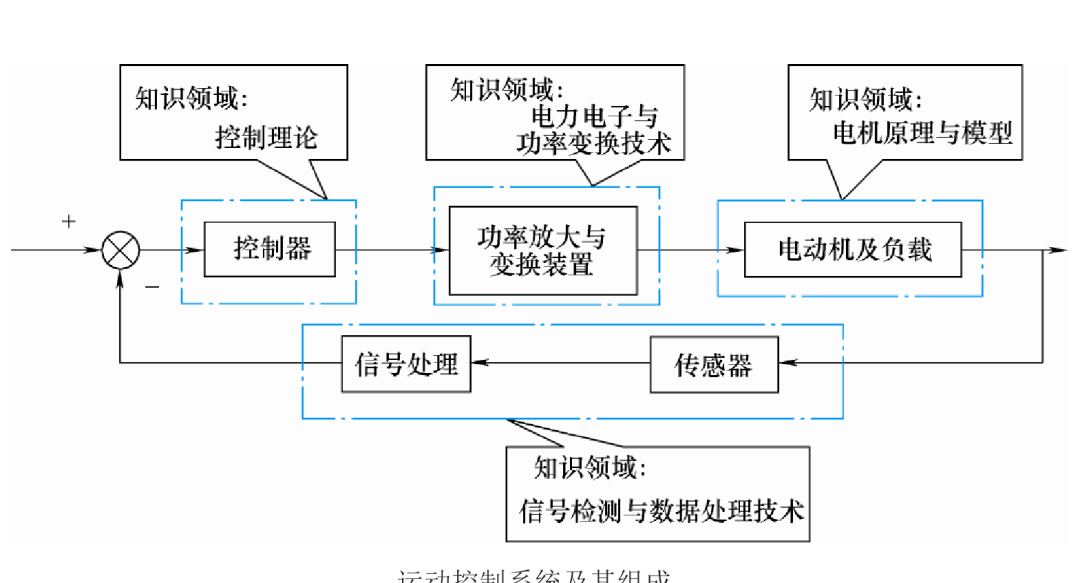
隨著醫(yī)療科技的飛速發(fā)展,微創(chuàng)手術(shù)以其創(chuàng)傷小、恢復(fù)快的優(yōu)點(diǎn)受到廣泛關(guān)注。而微創(chuàng)手術(shù)器械的制造精度和性能對(duì)手術(shù)的成功與否起著至關(guān)重要的作用。近年來,激光焊接技術(shù)憑借其獨(dú)特的優(yōu)勢,在醫(yī)療微創(chuàng)手術(shù)器械的工藝
2024-04-16 16:15:37950 
運(yùn)動(dòng)控制系統(tǒng)作為現(xiàn)代自動(dòng)化技術(shù)的核心之一,其廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人技術(shù)、精密制造等領(lǐng)域。它通過控制電機(jī)或其他執(zhí)行器,使機(jī)器或設(shè)備按照預(yù)期的軌跡和速度運(yùn)動(dòng),實(shí)現(xiàn)自動(dòng)化操作。本文將對(duì)運(yùn)動(dòng)控制系統(tǒng)的組成、作用進(jìn)行詳細(xì)闡述,并通過實(shí)例和數(shù)據(jù)分析,展示其在實(shí)際應(yīng)用中的價(jià)值和效果。
2024-06-05 16:35:434905 機(jī)械運(yùn)動(dòng)控制系統(tǒng),作為現(xiàn)代機(jī)械工程領(lǐng)域的重要組成部分,對(duì)于實(shí)現(xiàn)機(jī)械設(shè)備的自動(dòng)化、智能化和精確控制具有至關(guān)重要的意義。隨著科技的不斷進(jìn)步和工業(yè)自動(dòng)化水平的不斷提高,機(jī)械運(yùn)動(dòng)控制系統(tǒng)的應(yīng)用范圍也日益廣泛。本文將對(duì)機(jī)械運(yùn)動(dòng)控制系統(tǒng)的定義、組成、原理、應(yīng)用及未來發(fā)展趨勢進(jìn)行詳細(xì)介紹。
2024-06-07 14:46:123007 運(yùn)動(dòng)控制系統(tǒng)是一種用于控制機(jī)械運(yùn)動(dòng)的系統(tǒng),它能夠根據(jù)預(yù)定的軌跡和速度對(duì)機(jī)械進(jìn)行精確控制。運(yùn)動(dòng)控制系統(tǒng)廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人技術(shù)、航空航天等領(lǐng)域。本文將詳細(xì)介紹運(yùn)動(dòng)控制系統(tǒng)的組成、工作原理以及
2024-06-12 10:51:183313 、低熱影響區(qū)以及無接觸加工等特點(diǎn),在醫(yī)療領(lǐng)域備受青睞。 首先,激光焊接能夠?qū)崿F(xiàn)微米級(jí)的焊接精度,滿足微創(chuàng)手術(shù)器械對(duì)高精度制造的需求。這種高精度的焊接能力,確保了醫(yī)療器械在復(fù)雜人體環(huán)境中的穩(wěn)定性和可靠性。 其次,激
2024-09-27 16:44:311179 
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論