完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫(kù)為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
分立式紅外發(fā)射器和檢測(cè)器可采用幾種可能的配置。單個(gè)高功率發(fā)射器連接柔性光導(dǎo)管與光導(dǎo)管另一端的光電二極管。...
光束常采用以下方式獲得:激光準(zhǔn)直、圓柱或 二次曲面柱形棱角擴(kuò)束,非相干光(如白光、LED 光 源)通過(guò)小孔、狹縫(光柵)投影或相干光衍射等...
根據(jù)《中國(guó)機(jī)器人產(chǎn)業(yè)發(fā)展報(bào)告(2022年)》顯示,中國(guó)機(jī)器人市場(chǎng)持續(xù)蓬勃發(fā)展,預(yù)計(jì)2022 年,中國(guó)機(jī)器人市場(chǎng)規(guī)模將達(dá)到174 億美元,五年年均增長(zhǎng)率達(dá)到22%。...
讓機(jī)器人跳得更高,可能會(huì)涉及到使用一個(gè)更加靈活的彈簧,以最大限度地提高機(jī)器人可以存儲(chǔ)的能量,而不增加它的質(zhì)量。...
完整的零點(diǎn)標(biāo)定過(guò)程包括為每一個(gè)軸標(biāo)定零點(diǎn)。KUKAC4機(jī)器人通過(guò)技術(shù)輔助工具 EMD,可為任何一根在 機(jī)械零點(diǎn)位置的軸指定一個(gè)基準(zhǔn)值 (例如:0°)。...
觸覺(jué)傳感器、攝像頭、激光雷達(dá)、雷達(dá)、超聲波傳感器等是外部感知傳感器的幾個(gè)典型示例。隨著各類(lèi)機(jī)器人的日益普及,以及市場(chǎng)對(duì)“智能”機(jī)器人需求的不斷提高,英國(guó)知名研究公司IDTechEx預(yù)測(cè)機(jī)器人傳感器市場(chǎng)將在未來(lái)20年內(nèi)高速增長(zhǎng)。...
該研究對(duì)微型機(jī)器人的穩(wěn)定性和環(huán)境適應(yīng)性進(jìn)行評(píng)估。結(jié)果表明,機(jī)器人在水面上可以實(shí)現(xiàn)預(yù)編程的軌跡運(yùn)動(dòng),尤其是在化學(xué)試劑的作用和磁場(chǎng)的驅(qū)動(dòng)下實(shí)現(xiàn)了不同軌跡的運(yùn)動(dòng)。...
線路跟隨機(jī)器人是一個(gè)簡(jiǎn)單而迷人的機(jī)器人,適合大多數(shù)學(xué)生/業(yè)余愛(ài)好者建造。在本教程中,我們將學(xué)習(xí)線路跟隨機(jī)器人的工作原理以及如何使用 PIC 微控制器 PIC16F877A 構(gòu)建一個(gè)。PIC16F877A是Microchip的40引腳多用途MCU,我們?cè)谕暾腜IC教程系列中使用了該IC。...
依托機(jī)器視覺(jué)的機(jī)器人定位系統(tǒng)包含攝像機(jī)系統(tǒng)和控制系統(tǒng)。 其中攝像機(jī)系統(tǒng)中包括計(jì)算機(jī)(具有圖像采集卡)、攝像機(jī),主要收集視覺(jué)圖像,并應(yīng)用機(jī)器視覺(jué)算法。...
就算沒(méi)有電線,每組面對(duì)面連接也能在10V電壓下,傳輸8A的電流和50N的拉伸力。不過(guò)僅靠運(yùn)動(dòng)還不夠,機(jī)器人選取零件和搭載新機(jī)器人的過(guò)程還涉及抓取的動(dòng)作。...
現(xiàn)在的機(jī)器人少不了有各種傳感器,傳感器之間的標(biāo)定是機(jī)器人感知環(huán)境的一個(gè)重要前提。所謂標(biāo)定,是指確定傳感器之間的坐標(biāo)轉(zhuǎn)換關(guān)系。由于標(biāo)定的傳感器各異,好像沒(méi)有特別通用的方法。...
設(shè)計(jì)流程的第一步,就是拿出您的素描簿,開(kāi)始描繪機(jī)器人的不同概念。素描本身不必完美,只需要擁有大致形狀,并且形成具備粗略估計(jì)尺寸的組件。...
在這個(gè)項(xiàng)目中,讓我們利用樹(shù)莓派的力量來(lái)構(gòu)建一個(gè)機(jī)器人,它可以跟蹤球并跟隨它,就像踢足球的機(jī)器人一樣。...
在這個(gè)項(xiàng)目中,我們將學(xué)習(xí)如何使用Arduino構(gòu)建一個(gè)簡(jiǎn)單的機(jī)器人,它可以向火移動(dòng)并在火周?chē)樗畞?lái)?yè)錅缁稹_@是一個(gè)非常簡(jiǎn)單的機(jī)器人,可以教我們機(jī)器人的基本概念;一旦您了解了以下基礎(chǔ)知識(shí),您就可以構(gòu)建更復(fù)雜的機(jī)器人。所以讓我們開(kāi)始吧......
伺服系統(tǒng)(servomechanism)又稱(chēng)隨動(dòng)系統(tǒng),是用來(lái)精確地跟隨或復(fù)現(xiàn)某個(gè)過(guò)程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。...
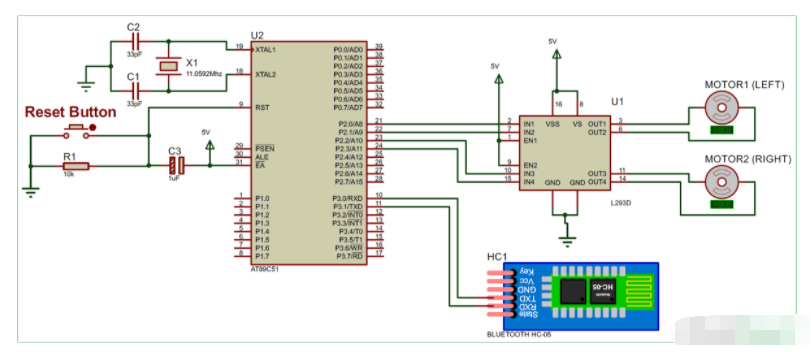
在這個(gè)項(xiàng)目中,我們將使用8051微控制器和藍(lán)牙模塊構(gòu)建一個(gè)Android手機(jī)控制的機(jī)器人。該機(jī)器人是使用直流電機(jī)設(shè)計(jì)的,直流電機(jī)的方向?qū)⒂蓮陌沧繎?yīng)用程序收到的命令控制。機(jī)器人的狀態(tài)被發(fā)送回安卓應(yīng)用程序。該項(xiàng)目還將幫助HC-05藍(lán)牙模塊與8051微控制器的接口....
人類(lèi)手臂的作用是將手移動(dòng)到不同的位置。類(lèi)似地,機(jī)器臂的作用則是移動(dòng)末端執(zhí)行器。您可以在機(jī)器臂上安裝適用于特定應(yīng)用場(chǎng)景的各種末端執(zhí)行器。...
碼垛動(dòng)作指令:以使用具有趨近點(diǎn)、堆疊點(diǎn)、回退點(diǎn)的路徑點(diǎn)作為位置 數(shù)據(jù)的動(dòng)作指令,是碼垛專(zhuān)用的動(dòng)作指令。該位置數(shù)據(jù)通過(guò)碼垛指令每次都 被改寫(xiě)。...
”→“KUKA Extension Bus (STS-X44)”→“EK1100 EtherCAT Coupler(2A E-Bus)”→“EL6752 DeviceNet Master”→“DeviceNet IO”,雙擊“Generic DeviceNet Device”,彈出 DeviceNe...
定期對(duì)ABB機(jī)器人的數(shù)據(jù)進(jìn)行備份,是保證ABB機(jī)器人正常工作的良好習(xí)慣。ABB機(jī)器人數(shù)據(jù)備份的對(duì)象是所有正在系統(tǒng)內(nèi)存運(yùn)行的RAPID程序和系統(tǒng)參數(shù)。當(dāng)機(jī)器人系統(tǒng)出現(xiàn)錯(cuò)亂或者重新安裝新系統(tǒng)以后,可以通過(guò)備份快速地把機(jī)器人恢復(fù)到備份時(shí)的狀態(tài)。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 長(zhǎng)沙勒克斯教育咨詢(xún)有限公司
湖南省長(zhǎng)沙市開(kāi)福區(qū)月湖街道匍園路20號(hào)聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1


