三自由度直升機的嵌入式控制系統(tǒng)
三自由度直升機可以應用于飛行器控制系統(tǒng)的半實物仿真試驗和性能測試等場合,用以模擬橫列式直升機,即傾轉(zhuǎn)旋翼機的直升機狀
2010-02-06 09:10:13 1616
1616 
六自由度電磁跟蹤系統(tǒng)根據(jù)電磁感應的原理來計算出目標的六個自由度參數(shù),從而唯一確定目標的位置和姿態(tài)。怎樣由接收到的模擬信號計算得到目標的位置和姿態(tài)參數(shù)是影響整個系統(tǒng)性能的關鍵所在。在一些早期的產(chǎn)品中對感應天線接收信號的處理主要采用模擬電路和單
2011-01-25 00:11:021646 
記者從中國科大獲悉,該校郭光燦院士團隊李傳鋒、周宗權等人成功研制出多自由度并行復用的固態(tài)量子存儲器,在國際上首次實現(xiàn)跨越3個自由度的復用量子存儲,并展示了時間和頻率自由度的任意光子脈沖操作功能。該成果近日發(fā)表在國際期刊《自然·通訊》上。
2018-08-30 14:08:072533 3自由度自動控制機械手,試用好使!希望可以幫助到大家
2014-09-11 15:55:50
51/stm32單片機控制6自由度機械臂(帶云臺)二次開發(fā)是用什么傳感器定位比較好?
2017-03-31 09:13:37
`分享給大家我自己做的四自由度機械手`
2015-09-09 09:27:35
本人建立一個七自由度的整車模型,仿真時一直報錯,出現(xiàn)代數(shù)環(huán)的問題,歡迎小伙伴們來探討!我qq:1139471346
2016-11-22 12:54:59
汽車駕駛模擬器二自由度運動系統(tǒng)
2012-08-06 13:06:11
ADI公司最新推出一款6自由度(6 DoF)慣性傳感器——ADIS16365,擴展了其iSensor智能傳感器產(chǎn)品系列。ADIS16365 IMU(慣性測量單元)實現(xiàn)了高性能、簡單性與改進的數(shù)據(jù)
2018-11-16 15:56:38
項目名稱:漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機器人試用計劃:1、申請理由希望早日接觸、應用國產(chǎn)的鴻蒙系統(tǒng)。2、項目名稱漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機器人3、計劃(1)約三個月時間,應用該款
2020-09-25 10:11:50
項目名稱:采用labview與FPGA的多自由度機械臂快速控制系統(tǒng)原型開發(fā)試用計劃: 機械臂在自動化工業(yè)中廣泛應用,由于每個自由度都有一對驅(qū)動-傳感環(huán)節(jié),多自由度下各環(huán)節(jié)的配合,動作完成的一致性需要
2016-12-19 15:30:56
`準備圍繞履帶車綜合做一些實際小項目,更重要的是將知識綜合運用,我將圍繞履帶車去實現(xiàn)wifi控制,4自由度機械手控制,安卓app控制,PS2手柄無線控制,估計這個月內(nèi)將教程全部完成,代碼調(diào)試的差不多
2015-08-04 23:05:28
如題,我在Labview里搭的二自由度車輛模型,給了一個角階躍信號,怎么出不來響應圖啊
2015-07-29 14:04:20
最近在參與一個六個自由度座椅控制的課題,需要查閱哪些方面的相關書籍,有什么推薦嗎?謝謝各位
2017-01-13 14:46:46
摘 要:十字形多自由度超聲電機其動子繞X、Y軸旋轉(zhuǎn)與繞Z軸旋轉(zhuǎn)的驅(qū)動機理是不同的,根據(jù)彈性接觸理論,對其進行了分別考慮,并建立了電機摩擦接觸分析模型。利用建立的模型,對多自由度電機機械特性進行了估算
2025-06-17 09:04:19
``受大象鼻子啟發(fā),研制出的萬向自由度的機械臂,可以完成更柔性的工作``
2016-10-19 14:36:31
、Zynq和攝像頭為硬件基礎,搭建了六自由度機器人視覺平臺。
(2)設計了基于 FPGA的視覺檢測方案。利用 西林提供的 HLS和CV庫對從攝像頭采集到的像素流進行實時處理,并設計了一套識別物塊坐標
2024-05-29 16:17:06
一前言針對機器人相關專業(yè)的教學需求,商飛信息科技開發(fā)出此開源六自由度協(xié)作機器人實驗平臺。該平臺有以下幾大特色機器人本體采用自主設計的3Kg負載六自由度協(xié)作機器人,機器人每個關節(jié)集成電機、減速器和驅(qū)動
2021-09-07 07:10:14
六自由度Stewart并聯(lián)運動平臺模型-X,Y,Z平移、旋轉(zhuǎn)測試六自由度Stewart并聯(lián)運動平臺-Z向旋轉(zhuǎn)正弦波復現(xiàn)六自由度Stewart并聯(lián)運動平臺-Z向平移正弦波復現(xiàn)
2014-04-16 23:25:51
怎么用LabVIEW自定義一個導彈(飛行器)的六自由度彈道仿真界面,使其能夠和simulink進行聯(lián)合仿真,并且能夠在界面中顯示導彈打擊目標的三維運動曲線,有沒有做過的或者這方面比較牛的人給一些指點,我是新手,LabVIEW不太懂,但是這個課程設計要的比較急,求幫助,我有彈道仿真simulink程序
2014-12-20 21:40:52
我們設計的四自由度機器人走一定距離會走偏,要求走四米的直線,偏差不能超過五厘米,而且還要轉(zhuǎn)彎后繼續(xù)走直線,請問有什么比較好用的傳感器可以既節(jié)省時間又可以讓行走偏差縮小。
2014-08-15 15:49:53
PCI-7344作為伺服電機的運動控制器。 2. 對于手腕旋轉(zhuǎn)自由度以及抓取手爪吸合張開的控制,考慮到這部分機構主要處于靠近末端負載,要求體積尺寸小等原因,我們選擇采用了直流電機配齒輪減速器并通過
2019-05-06 09:26:38
分析了欠驅(qū)動兩自由度機械臂主、被動關節(jié)間的動力學耦合特性,指出了被動關節(jié)處于不同位置時耦合特性的差異。針對主、被動關節(jié)間的動力學耦合特性及其差異,提出了兩種
2009-08-04 15:51:33 27
27 提出了一種人手掌的簡化模型,根據(jù)該模型,設計了仿人靈巧手掌的機構,使得只作為仿人靈巧手手指及其控制部件機架的手掌形成弧形自由度參加手部動作,提高了仿人靈巧手通
2009-08-13 10:10:0222 提出一種單神經(jīng)元二自由度PID 控制方法,將前饋型二自由度PID 的五個參數(shù)分別對應于單神經(jīng)元的五個權值,將二次型性能指標Pe2 (k) + QΔu 2 (k)作為控制算法中加權系數(shù)學習的優(yōu)化
2009-08-27 08:35:3711 新型三自由度碟型磁浮馬達特性量測與改善本計劃將針對本校電機系所研制之新型三自由度碟型磁浮馬達進行特性量測與改善。此碟型磁浮馬達是由具有18 個E型硅鋼片之三相交流
2009-11-17 18:13:3238 針對二自由度PID 控制器參數(shù)整定困難的問題,提出了一種基于單親遺傳算法的二自由度參數(shù)整定方法。運用該算法分別對單自由度PID 控制器和二自由度控制器進行了整定,并與
2009-12-26 13:56:4223 針對目前手動調(diào)整衛(wèi)星姿態(tài)運動仿真設備氣浮臺時,調(diào)節(jié)時間過長而且平臺浮起部分擺動周期過短的問題,提出了三自由度氣浮臺自動平衡技術。本文重點推導了三自由度氣浮臺
2010-01-18 13:52:1719 車輛仿真模型的精度是防抱死系統(tǒng)仿真研究的關鍵環(huán)節(jié),控制邏輯是防抱死系統(tǒng)關鍵技術之一。詳細描述了15 自由度車輛動力學模型,與實車試驗對比完成了模型驗證工作。介紹
2010-01-20 13:40:2714 GTS六自由度激光自動精準跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2023-10-12 09:26:16
中圖儀器牽頭的國家重點研發(fā)計劃——“六自由度激光自動精準跟蹤測量關鍵技術"的項目綜合績效評價會議在深圳順利召開。本項目瞄準我國航空航天、汽車船舶、軌道交通、機器人、核電、大科學裝置等裝備制造領域
2023-10-27 11:27:00
三自由度氣動機械手的PLC控制
一、實驗目的:通過對一個三自由度氣動機械手的控制程序的設計,熟悉基于PLC的
2008-09-23 08:19:424196 三自由度的機械爬蟲的運動原理隨著科學的發(fā)展,智能機器人在不知不覺中,逐步代替人類從事危險的工作,完成困難的任務:從深入火場救人,到探索無盡
2009-03-06 20:26:142411 
中圖儀器GTS系列6自由度激光跟蹤儀能夠在百米大尺度空間內(nèi)實現(xiàn)μm級別的精度測量,廣泛應用于尺寸測量、安裝定位、校正和逆向工程等領域。功能特點1、集成化控制主機設計GTS系列6自由度激光跟蹤儀強大
2025-02-07 14:25:19
)的高性能光電測量儀器。GTS六自由度激光跟蹤儀在飛機、汽車、船舶、航天、機器人、核電、軌道交通裝備制造行業(yè)以及大型科學工程、工業(yè)母機的高精密加工和裝配中,能夠解
2025-05-23 14:34:23
GTS六自由度激光跟蹤定位儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。能夠解決大型、超大型工件
2025-05-28 11:12:48
中圖儀器GTS系列6自由度激光跟蹤測量儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。能夠解決大型
2025-06-10 11:18:09
PLR3000多自由度測量光纖激光尺是新一代高精度位置檢測設備,基于激光干涉測量原理,專為超精密加工、微電子制造、光刻技術、航空航天等高要求領域設計。突破性技術融合高穩(wěn)定性氦氖激光光源與保偏光纖傳輸
2025-07-25 10:54:28
PLR3000多自由度光纖激光尺測量儀是新一代高精度位置檢測設備,基于激光干涉測量原理,專為超精密加工、微電子制造、光刻技術、航空航天等高要求領域設計。PLR3000系列0.02ppm穩(wěn)頻精度光纖
2025-09-15 14:12:26
設計自由度很大的二級直耦寬帶放大器
電路的功能
雖然很多單片IC也被稱為寬帶放大器,
2010-04-29 18:24:081367 
SimTec仿真技術公司總部位于德國北部Braunschweig,是一家擁有超過20年歷史的國際領先的運動仿真系統(tǒng)制造公司。 SimTec專門電液伺服液多自由度運動模擬系統(tǒng)及運動數(shù)據(jù)采集系統(tǒng)的的軟硬
2011-04-07 16:34:4222 闡述了二自由度系統(tǒng)的類型及應用價值,推出了基本運算為不完全微分PID的濾波型二自由度控制算法,它具有結構簡單,參數(shù)整定容易,比常規(guī)PID控制器性能優(yōu)越等特點。
2011-04-09 10:06:44108 針對典型的工業(yè)過程控制對象,提出了一種二自由度內(nèi)模控制方法,此方法可以使系統(tǒng)同時具有良好的目標值跟蹤特性、干擾抑制特性和魯棒性,改進了常規(guī)內(nèi)模控制的不足,而且控制算法簡
2011-05-23 15:12:4027 基于MSP430F149單片機設計了一種三自由度轉(zhuǎn)臺系統(tǒng)。在該系統(tǒng)中,利用旋轉(zhuǎn)編碼器的信息反饋,通過對電機的閉環(huán)控制,使三自由度轉(zhuǎn)臺能夠模擬飛機的飛行姿態(tài)。
2011-09-26 13:58:192987 
為了使六自由度機械臂完成特定的動作, 需要設計計算相應的指令序列. 首先計算了機械臂位姿與指尖位置之間的關系公式, 然后針對機械臂的到達問題、沿曲線運動問題和避障問題, 分別
2012-02-17 16:55:04193 臺燈是我們每個人夜晚學習看書的常用燈具,常見的臺燈雖然可以彎曲到一定的程度,但是有時還是不能夠滿足人們自由的需求。LED燈光之家這就是自由度非常高的LED臺燈,燈具模塊由
2012-07-19 10:10:313567 
關于汽車在點頭與沉浮兩個自由度方向的問題,利用simulink進行求解。
2016-02-16 17:18:060 大專生畢業(yè)設計任務書《基于PLC的五自由度噴漆機械手控制系統(tǒng)設計》。
2016-03-18 14:03:580 超聲波在六自由度測量定位系統(tǒng)中的應用,有興趣的同學可以下載學習
2016-05-04 14:37:530 19自由度機器人_動作例程,感興趣的小伙伴們可以瞧一瞧。
2016-11-17 18:35:231 二自由度行波型超聲波電機定子的優(yōu)化研究_傅平
2017-01-04 16:45:451 軸向電磁軸承多自由度承載力理論與實驗研究_張云鵬
2017-01-07 18:39:176 多自由度超聲電機驅(qū)動電路研究_朱華
2017-01-08 11:20:203 兩自由度直驅(qū)感應電機優(yōu)化設計及特性分析_司紀凱
2017-01-08 11:28:380 基于二自由度模型驅(qū)動PID的CFB鍋爐床溫控制_吳丹丹
2017-01-13 21:36:190 基于模糊PD算法的三自由度機械臂遙操作雙邊控制_邱恒
2017-01-21 12:16:518 六自由度液壓運動平臺的迭代學習控制_盧穎
2017-03-15 08:00:001 6自由度機器人 雙足竟步機器人研究報告 加代碼
2017-04-10 11:19:1266 本論文以螺旋理論為基礎,提出一種系統(tǒng)的結構綜合方法。根據(jù)各條支鏈對運動平臺所提供的反螺旋約束的線性關系,研究了構成五自由度并聯(lián)機器人機構的各條支鏈所有可能的運動副組合以及它們的空間幾何條件。利用這一方法,設計出一組結構對稱的五自由度并聯(lián)機器人。
2017-10-17 14:51:586 理想的少自由度并聯(lián)機構的所有分支最好具有完全相同的結構,保持結構的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯(lián)機器人機構。研究結果表明,該機構的運動平臺具有
2017-10-23 16:24:5015 建立了二自由度汽車油氣懸架系統(tǒng)模型,分析了油氣懸架和車身模型的非線性特性。運用AMEsim仿真軟件,通過模型對不同的激振頻率的時域和頻譜響應分析,驗證了油氣懸架非線性振動模型的正確性。仿真結果表明,系統(tǒng)產(chǎn)生了接近激振頻率分數(shù)(或整數(shù)倍)的頻率分量,造成亞諧波(或超諧波)共振,導致系統(tǒng)振動不穩(wěn)定。
2018-01-16 16:49:302 機器人機構能夠獨立運動的關節(jié)數(shù)目,稱為機器人機構的運動自由度,簡稱自由度(Degree of Freedom),由DOF簡寫表示。
2018-01-17 10:03:2013429 現(xiàn)在用的最多的工業(yè)機器人,一般都是六軸的,但是最近推出來的人機協(xié)作機械臂,卻有7個自由度,一直想不明白為什么。直到最近看到知乎上的一個問題:人的手臂(腕關節(jié)到肩關節(jié))有幾個自由度?才發(fā)現(xiàn),原來7個
2018-02-07 15:40:2518884 
積累和放大、位置反解容易等優(yōu)點, 與串聯(lián)機構在應用上形成了互補關系。目前, 對并聯(lián)機器人研究較多的是6 自由度( 6DOF) 并聯(lián)機器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2018-10-07 10:57:006863 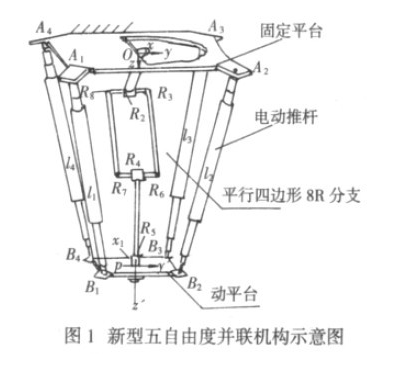
現(xiàn)在用的最多的工業(yè)機器人,一般都是六軸的,但是最近推出來的人機協(xié)作機械臂,卻有7個自由度,一直想不明白為什么。
2019-03-17 09:23:0227705 6自由度慣性傳感器—ADIS1633x,1636x,1637x和1638x
2019-07-19 06:03:003699 他們采用了一種MBDA之前在Simulink中已經(jīng)開發(fā)出來的6自由度火箭模型。 他們將此6自由度火箭模型與另一個MBDA團隊在Simulink中開發(fā)的跟蹤天線控制器模型結合在一起。他們使用組合模型運行蒙特卡羅模擬,并改進系統(tǒng)的精度和帶寬要求。
2019-09-12 15:50:032364 我希望這些照片對您有所幫助組裝您的4自由度機械臂。
2019-10-09 11:52:0311563 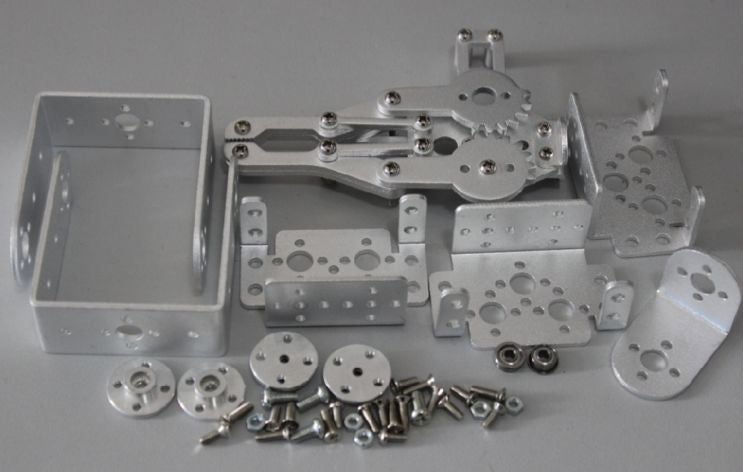
,仿真功能強大,可以在模型中通過改變結構,優(yōu)化系統(tǒng)參數(shù),在仿真環(huán)境中分析結果。利用 SimMechanics 的上述優(yōu)點,以工業(yè)六自由度機械臂 ER10 為研究對象,將 SolidWorks 建立好的機械臂 ER10 模型導入到 MATLAB/ SimMechanics 仿真平臺中,生成對應的仿真模型,
2019-11-12 08:00:001 小型廉價的6自由度機械臂,希望能圓大家一個玩機械手的夢! DFLG6DOF機械手由6個微型伺服電機(舵機)組成,分別對應于臂、肘、腕(2個自由度)、張合5個關節(jié)和1個旋轉(zhuǎn)底座,每個關節(jié)可在一定范圍內(nèi)運動,底座可以實現(xiàn)左右90度旋轉(zhuǎn)。通過上位
2020-01-14 10:48:396140 
二自由度DF05BB舵機云臺是一款5公斤大扭矩、高性價比的小型云臺,可以在水平和垂直方向做二自由度運動,方便安裝攝像頭,可以實現(xiàn)圖像監(jiān)控、圖像識別定位追蹤;加裝紅外傳感器或超聲波測距傳感器可以組合成一體化探測裝置,使機器人能感測周圍障礙物,從而實現(xiàn)機器人避障功能。
2019-12-04 14:21:345277 
六自由度運動平臺是典型的并聯(lián)運動機構,由六支作動筒,上、下各六只萬向鉸鏈和上、下兩個平臺組成,下平臺固定在基礎上,借助六支作動筒的伸縮運動,完成上平臺在空間六個自由度(X,Y,Z,α,β,γ)的運動,從而可以模擬出各種空間運動姿態(tài)。
2020-03-07 16:54:001863 ADIS16486:六自由度慣性傳感器數(shù)據(jù)表
2021-03-22 13:11:534 ADIS16305:精密四自由度傳感器過時數(shù)據(jù)表
2021-05-09 15:47:293 ADIS16407:十自由度慣性傳感器數(shù)據(jù)表
2021-05-09 18:03:099 ADIS16367:六自由度慣性傳感器報廢數(shù)據(jù)表
2021-05-10 15:50:024 ADIS16334:低調(diào)六自由度慣性傳感器數(shù)據(jù)表
2021-05-23 13:27:265 ADIS16485:戰(zhàn)術級六自由度慣性傳感器數(shù)據(jù)表
2021-05-23 17:32:479 ADIS16365:六自由度慣性傳感器數(shù)據(jù)表
2021-05-23 20:27:512 ADIS16385:六自由度慣性傳感器報廢數(shù)據(jù)表
2021-05-24 09:14:261 ADIS16495:戰(zhàn)術級六自由度慣性傳感器數(shù)據(jù)表
2021-05-25 18:04:219 ADIS16497:戰(zhàn)術級六自由度慣性傳感器數(shù)據(jù)表
2021-05-25 20:07:047 ADIS16480:十自由度動態(tài)定向慣性傳感器輸出數(shù)據(jù)表
2021-05-26 13:58:085 ADIS16488:戰(zhàn)術級十自由度慣性傳感器數(shù)據(jù)表
2021-05-27 18:24:5612 ADIS16489七自由度慣性傳感器數(shù)據(jù)表
2021-06-02 15:02:583 針對四輪輪轂電機電動汽車控制算法驗證需要,基于 Matlab/Simulink 建立了 15 自由度四輪輪轂電機電動汽車模型。模型采用模塊化設計,給出了動力學模型方程、整車模型框圖和各模塊建模
2022-04-06 16:27:3211 1. 運動功能說明 ? ? R204樣機是一款擁有4個自由度的串聯(lián)機械臂。本文示例實現(xiàn)4自由度串聯(lián)機械臂抓取物品、放下的功能。 2. 結構說明 ? ?R204號樣機由4個串聯(lián)的 舵機關節(jié)模組 和1個
2023-03-03 17:35:421738 
工業(yè)機器人自由度一般分為4個自由度,或者6個自由度,關節(jié)機器人主要是模仿人的手臂進行設計的。
2023-03-16 12:20:304280 基于三維模型的視覺定位通過在查詢圖像和三維模型間建立 2D-3D 對應關系,估計相機六自由度的位姿。傳統(tǒng)的視覺定位方法通常采用人工設計的局部特征,如 SIFT,來實現(xiàn) 2D-3D 匹配,并結合圖像檢索技術,將匹配范圍限制在查詢圖像的可見區(qū)域,以適應大規(guī)模場景的需求。
2023-04-20 10:07:051717 隨著機器人變得日益成熟,它們已經(jīng)能夠應用到處理越來越多的工業(yè)工序。6自由度(6Dof)機器人能夠執(zhí)行復雜的動作,因而可以在許多復雜的工業(yè)任務當中展示良好的性能,比如碼垛、搬運、涂膠和焊接等。6自由度機器人可以提舉和靈活地操縱重型載荷,并通過復雜的幾何運動對載荷進行精確操控。
2023-05-18 17:34:212139 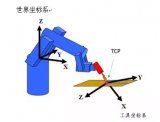
人的手臂(腕關節(jié)到肩關節(jié))有幾個自由度?我想絕大部分人都沒有想過,更別說去了解有哪幾個自由度,即使是學工科的人,也未必能解釋清楚。沒想到知乎上居然有人把這個問題回答的這么專業(yè)有內(nèi)涵,同時又那么有哲理,忍不住想要把這個答案分享一下。
2023-06-07 15:48:162297 
本文實例將實現(xiàn)2自由度并聯(lián)仿生腿模組運動起來,模擬實現(xiàn)狗腿行走的動作。
2023-06-18 10:35:201291 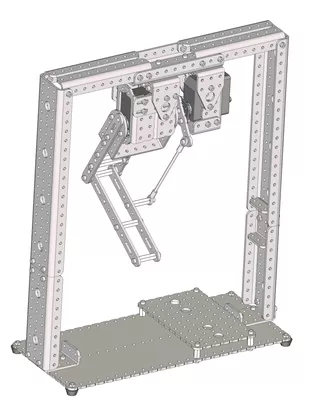
本文示例將實現(xiàn)4自由度并聯(lián)機器狗行走的功能。
2023-06-18 10:49:201594 
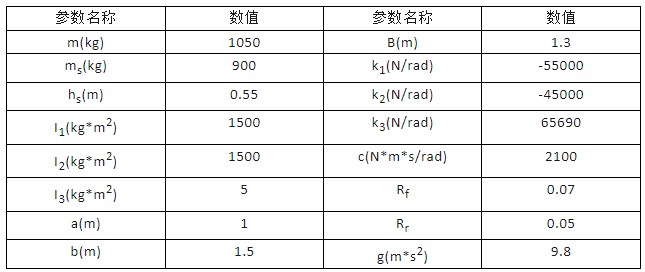
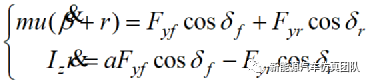
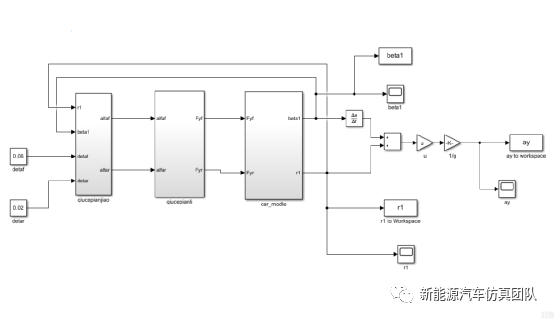
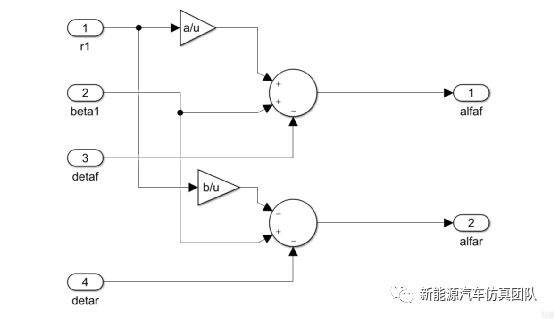
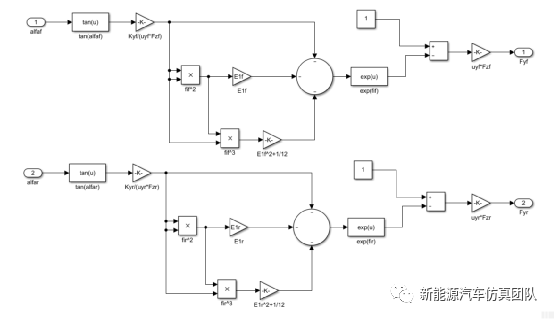
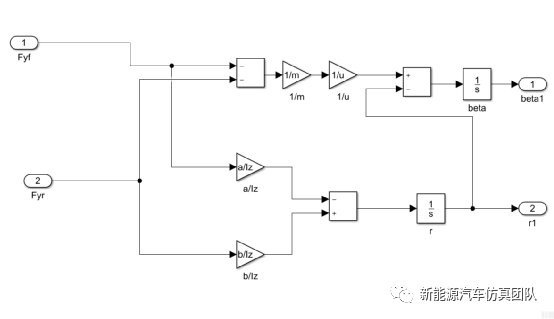
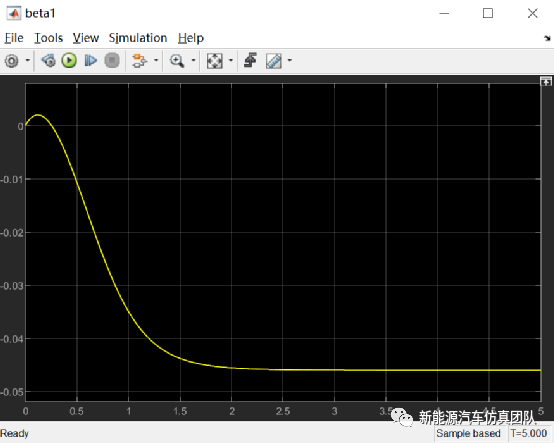
線性2自由度汽車模型是汽車操縱穩(wěn)定性分析中最簡單、最典型的模型。
2023-06-28 16:52:314575 
GTS6000激光跟蹤儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。
2023-07-21 10:58:581250 
電子發(fā)燒友網(wǎng)站提供《多自由度仿生假手嵌入式控制系統(tǒng)及其抓取策略.pdf》資料免費下載
2023-10-10 11:18:381 激光跟蹤儀與空間姿態(tài)探頭(iProbe 6D姿態(tài)探頭)配合使用,就組成六自由度激光跟蹤儀。它能夠根據(jù)合作目標的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。
2023-12-12 09:39:511472 
 電子發(fā)燒友App
電子發(fā)燒友App



 ;
; ;
; ;
; ;
; ;
; ;
; 。
。





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論