步進電機一般分為永磁式(PM)、反應式(VR)和混合式(HB)三種類型。目前,二相混合式步進電機的應用最為廣泛。
2012-01-26 14:23:00 3342
3342 
步進電機基礎(2.4)- HB型步進電機的轉子齒數與主極數之間的關系前言基本信息公式前言說明HB型步進電機的轉子齒數與主極數之間的關系1. HB步進電機的相數、轉子齒數、主極數之間的表達式2. 相內
2021-07-07 07:25:50
,若原步進電機轉一圈為M步,細分后轉一圈為M*N步。通常市售的 三相感應式步進電機基本步距角 3度,每圈為 120整步或240半步。 三相混合式步進電機基本步距角 1.2度,每圈為 150整步或
2015-12-28 22:19:35
的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一...
2021-07-06 06:00:20
Part 1:名詞概念轉子齒數Z:轉子圓周上均勻分布的小齒個數;定子相數M:步進電機線圈(繞組)個數,以產生不同對極N、S磁場;通電方式C:①C=1 :單相輪流通電、雙相輪流通電;②C=2 :單
2021-07-07 07:01:09
類型。混合式步進電機將前兩類步進電機的優點綜合于一身。混合式步進電機根據線圈極數可分為 兩相、三相、五相步進電機。兩相混合式步進電機目前應用最為廣泛。常見的兩相混合式步進電機的定子...
2021-07-08 09:34:00
步進電機的相數:是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為
2021-08-31 07:17:50
相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即
2021-07-07 06:38:47
步進電機的相數是指什么意思?步進電機的拍數是指什么意思?
2021-10-28 06:45:13
應用技術作者坂本正文譯者王自強公式θs = 180° /P*Nr ?????????????? 公式(2. 1) 步進電機的步距角θs,其中Nr 為轉子極對數,P為定子相數前言說明根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄
2021-07-07 06:34:16
、90BYG、130BYG等均為國內標準。3、步進電機的靜態指標術語相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒
2018-10-12 11:07:38
淺析步進電機的拍數與相數
2021-03-17 07:19:40
包括反應式步進電機(VR)、永磁式步進電機(PM)、混合式步進電機(HB)和單相式步進電機等。 永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度; 反應式步進電機一般為
2014-01-11 14:49:42
大,力矩大,動態性能好;3、混合式步進電機(HB):結合VR、PM電機優點,輸出力矩大、步距角小、動態性能好,目前使用最為廣泛,下述以該類電機為例進行介紹。二、兩相混合式步進電機結構1、實物圖如下所示,主要由定子、轉子、端蓋組成2、結構示意圖如下所示3、剖視圖分析(剖切轉子S端)定子
2021-07-07 08:09:56
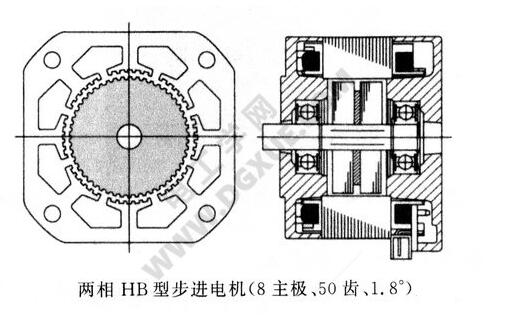
、57、86、110等3、步進電動機構造:由轉子(轉子鐵芯、永磁體、轉軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉子有50個小齒;三相電機的定子有9個大齒,45個小齒,轉子有50個小齒。4、步進電動機主要參數步進電機的相數:是指電機
2021-06-28 13:06:37
步進電機兩相步進電機 兩相步進電機一共有兩個線圈,A線圈,B線圈,如圖1 圖1 步距角的計算方法:轉子齒數(轉子極對數)Nr,定子相數P Θ=180/Nr*P。 圖1:Θ=180/1*2=90。 控制線圈的通斷,即可以控制線圈的轉動,轉動的時序為 輸入123456789 +A110011...
2021-06-30 07:06:07
混合式步進電機的驅動原理是什么?混合式步進電機的結構是由哪些部分組成的?混合式步進電機如何去實現輸出控制呢?
2021-12-21 06:29:50
混合式步進電機的結構和驅動原理是什么?如何產生Spwm?
2021-12-21 07:20:31
一、步進電機模型1.步進電機分類 廣義上可將步進電機分為機械式、電磁式、組合式。按結構特點電磁式步進電機可分為:反應式(VR)、永磁式(PM)、混合式(HB)按相數可分為:單相、兩相、多相 2.步進
2021-07-08 07:23:34
電機的極數和轉速有什么關系 如何退出運行的無銘牌電動機的極數
2021-02-25 07:33:22
單片機步進電機控制器是什么?怎樣去制作一種單片機電動機控制器?D306型號三相伺服混合式步進電機驅動器具有哪些特點?怎樣去使用D306三相混合式步進電機驅動器?
2021-07-13 08:09:56
、步進電機按轉子的結構分三種:永磁式(PM),反應式(VR)和混合式(HB)。圖1永磁式永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度或15度;價格便宜,精度差。圖2 反應反應式步進
2022-05-26 13:58:40
要求旋轉。因為混合式步進電機轉子的永磁磁場也產生一部分的轉矩,所以比反應式步進電機僅由定子磁場產生的轉矩要大。 圖二:二相混合式步進電機定轉子結構圖步進電機有如下的特點:(1)步距角穩定,只與電機結構等
2021-09-10 08:45:23
樣,得認清女人的類別,挑一類自己好口的進行針對性的進攻這樣方可告捷啊。于是就百度啊google啊,得到以下結論:步進電機分三種:永磁式(PM)、反應式(VR)和混合式(HB)。永磁式步進一般為兩相,轉矩
2019-07-27 04:30:00
與特性根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄。定子相數的分類、結構、原理當步進電機切換一次定子繞組的激磁電流時,...
2021-06-30 07:09:42
兩相混合式步進電機H橋驅動電路設計原理
2021-02-19 06:00:06
誰有PL2303的驅動適合win8的 謝謝啦 還有我用L298驅動二相混合式步進電機怎動不了求一個不帶按鍵的C程序 謝謝大神
2015-12-31 12:08:24
二相混合式步進電機simulink仿真模型怎么搭建?
2021-10-28 07:53:18
細分原理二相混合式步進電機電磁轉矩方程?p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2020-06-14 22:33:19
細分原理二相混合式步進電機電磁轉矩方程p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2021-07-08 09:59:07
在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真閉環矢量控制系統simulink圖?閉環矢量控制系統系統結構框圖?二相混合式步進電機的數學模型矩角特性?其中 Nr-轉子齒數
2020-06-14 22:35:18
上圖中的Te仿真中有兩個小錯誤,正確方程應為:模型文件名為:model_of_Two_phase_Hybrid_stepping_motor.slx(2019b)參考文獻:基于MATLAB/Simulink的二相混合式步進電機的建模與仿真
2021-08-31 06:13:04
下圖為兩相四線混合式步進電機用雙H橋驅動電路。圖中Ra、La、Rb、Lb分別為兩相四線混合式步進電機的兩相電阻及電感參數。
2021-07-07 07:15:42
步進電機的相數是指電機內部的線圈組數,如4相就是有ABCD四組線圈。拍數是指完成一個循環的通電次數。例如按照ABCD順序完成一個循環,就稱為單4拍。相鄰的兩個線圈也可以同時通電,例如可以按照
2021-07-08 08:20:07
分析了電腦繡花機系統中,現有的五相混合式步進電機驅動器存在低頻轉矩振蕩、高頻輸出轉矩不足和多電源供電及不通用等諸多不足之處的基礎上,設計出一種基于單片機的通用型五相混合式步進電機驅動器.該驅動器
2011-03-07 12:15:26
如何使用uln2003驅動39BYG混合式1.8°步進角的步進電機?
2021-10-28 07:24:24
設置一段一相,幾乎取消的多相電機互繞的端部。對于n段電機,各段的轉子或者定子錯開其極距角的1/n,可將極距進一步進行n倍細分。 2.3 混合式步進電機 單純的變磁阻電機,旋轉的方向取決于脈沖電流
2023-03-03 15:44:49
1.步進電機的基本知識(1)拍數——每一次循環所包含的通電狀態數(電機轉過一個齒距角所需脈沖數)(2)單拍制分配方式——狀態數=相數(3)雙拍制分配方式——狀態數=相數的兩倍(4)步距角 ——步進機
2021-07-08 09:33:28
三相混合式步進電機驅動器B3C的工作原理根據正弦電流細分驅動的原理,設計出三相混合式細分型步進電機驅動器,系統采用電流跟蹤和脈寬調制技術,使電機的相電流為相位相
2008-12-19 01:36:33 136
136 本文針對電流控制的兩相混合式步進電機給出了一種驅動方案。
2009-04-02 15:24:0740 兩相混合式步進電機驅動芯片BY-5064使用說明:BY-5064是一款小型化、高細分、多功能、使用方便的兩相混合式步進電機驅動芯片,配合簡單的外圍電路即可實現高性能的驅動電路。該
2009-09-29 10:41:5163 DY3A/DY3B 混合式步進電機使用手冊
2010-01-09 10:19:1821 二相混合式步進電機驅動器的優化設計:從 改善步進電機動靜態性能的角度出發,給出了基于8051的二相混合式步進電機驅動器的優化設計方案,主要介紹了系統結構、通訊策略、
2010-01-14 09:44:21100 公司主營產品:信濃步進電機,步進電機,步進馬達,混合式步進電機,剎車步進電機,齒輪箱步進電機。步進電機驅動器,步進電機驅動芯片等。 公司是集機電產品開發、生產、銷售為一體的高新技術企業。擁有經驗豐富的銷售和技術團隊,我們一直致力于高品質運動控制產品的研發、生產和銷售。
2024-11-13 11:18:34
五相混合式步進電動機走步均勻性分析
文章對五相混合式步進電動機采用下橋臂電流恒定不變式恒流斬波驅動時的步進均勻性進行了詳細分析,針
2009-10-16 08:32:201300 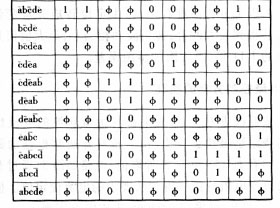
三相混合式多細分步進電機驅動器
本文根據正弦電流細分驅動的原理,設計出三相混合式多細分步進電機驅動器。系統采用電流跟跟蹤和脈寬調制技術,使用電機的相
2010-02-22 10:58:092472 
在分析了步進電機的驅動特性和斬波恒流細分驅動原理和混合式步進電機驅動芯片L297/298的性能、結構的基礎上,結合8751單片機,設計出了混合式步進電機驅動器.實測表明,此細分
2011-09-27 16:25:0674 三相混合式步進電機比二相步進電機有更好的低速平穩性及輸出力矩,所以三相混合式步進電機比二相步進電機有更好應用前景。
2012-02-29 10:50:403355 
根據兩相混合式步進電機細分驅動原理,設計了一種基于STM32F103RB單片機的、細分度可調的步進電機驅動器。控制器采用電流矢量控制算法,通過雙H橋驅動步進電機的兩相轉子。利用片
2012-06-13 14:29:36240 基于DSP的三相混合式步進電機的SVPWM控制。
2016-04-18 09:47:4917 多細分二相混合式步進電機驅動器的研制,下來看看
2016-04-25 10:40:3618 多細分三相混合式步進電機驅動器研究及實現
2016-04-25 10:40:3645 二相混合式步進電機驅動器的優化設計,下來看看
2016-04-25 10:40:3623 混合式步進驅動單元的研究,有需要 的下來看看
2016-04-25 10:40:3616 基于DSP的兩相混合式步進電機細分驅動設計
2016-04-25 10:54:0917 不同轉子齒數電勵磁分塊轉子磁通切換電機諧波特性影響的對比研究_連廣坤
2017-01-07 16:52:064 三相異步電動機“極數”是指定子磁場磁極的個數。定子繞組的連接方式不同,可形成定子磁場的不同極數。選擇電動機的極數是由負荷需要的轉速來確定的,電動機的極數直接影響電動機的轉速。
2017-11-10 12:51:5445050 一、型號說明 混合式步進電機采用稀土永磁 材料制造 與反應式步進電機相比具有電磁損耗小 轉換效率高 動態特性好等優點 混合步進電機的電磁靜力矩為電機阻尼 ,取消了反應式電機的機械阻尼盤 無需人工調整 運行平穩 噪音小不易失步 混合式步進電機取代反應式電機是經濟型數控系統的發展趨勢。
2017-11-13 12:46:4117 混合式(即HB型)步進電機有兩相、三相、五相式,轉子因與相數無關,而采用相同轉子,本文以兩相HB型混合式步進電機為例加以說明。HB型的名稱由其轉子結構得來,其轉子是PM型永磁步進電機與VR型變磁阻
2018-04-25 10:04:0522010 轉動一個固定的角度(即步進角)。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的。那么什么是混合式步進電機,混合式步進電機和反應式步進電機有什么區別嗎?接下來跟隨小編詳細的來了解一下混合式步進電機。
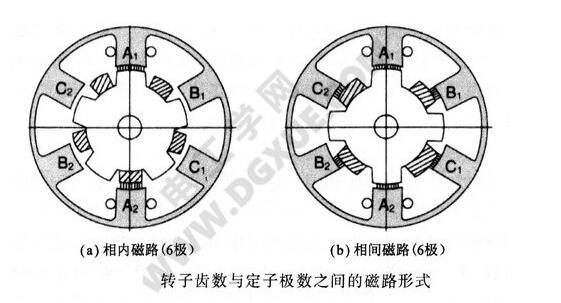
2018-04-25 10:59:1118051 定子的主極數為6,交鏈磁通大,而且兩相激磁時的轉矩合成效率比兩相步進電機好,轉矩較高。
2020-04-03 09:18:555740 選擇步進電機時首先要考慮各種步進電機的優缺點,在這里先介紹不同相數的步進電機的優缺點: ■兩相永磁式(PM)型步進電機 ⑴優點 ①便宜。一般比同等大小的混合式(HB)型步進電機的價格低1/2。 ②跟
2020-05-31 09:26:424636 完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA- AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A。
2020-08-31 14:13:0728246 ①拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA- AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A。
2020-12-14 21:25:002490 步進電機從其結構形式上可分為反應式步進電機、永磁式步進電機、混合式步進電機、單相步進電機、平面步進電機等多種類型。
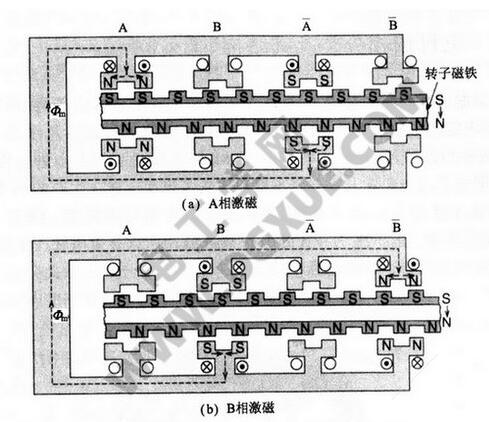
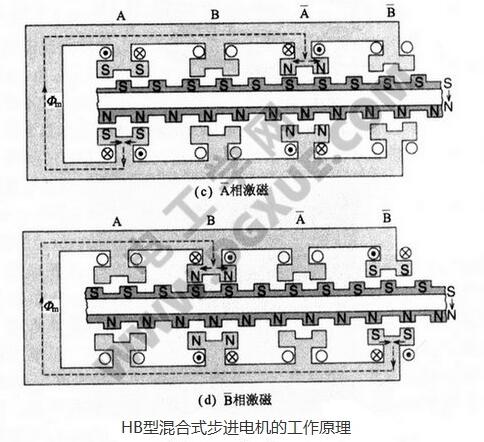
2020-12-26 08:30:355608 此前已經以PM型步進電機為例介紹了步進電機的工作。本文將介紹當今應用廣泛的混合式步進電機的結構和工作原理。
2021-06-12 10:48:008291 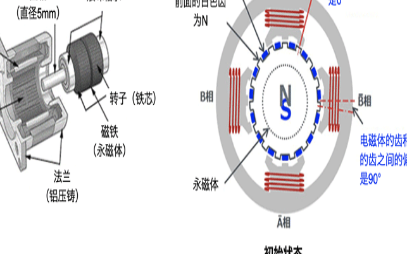
此前已經以PM型步進電機為例介紹了步進電機的工作。本文將介紹當今應用廣泛的混合式步進電機的結構和工作原理。混合式步進電機的結構,混合式步進電機是兼具VR型和PM型電機優點的步進電機。
2023-02-24 09:51:102827 
兩相混合式步進電機的物理結構通常情況下一般主要分為定子和轉子。其軸向結構如圖 2-4所示。定子結構的部分有鐵芯和繞組等有關組成而轉子結構的部分有鐵芯和轉軸。通過磁體產生的磁場,將兩段鐵芯磁化成兩極性,都各有50個小齒,而且在設計時錯開了1/2齒。
2023-03-01 10:09:024156 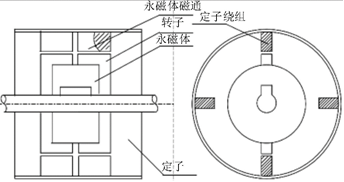
有兩種類型:單堆疊式和雙堆疊式。單堆疊式混合式步進電機的轉子上只有一個永磁極和多個可變磁阻極,而雙堆疊式混合式步進電機的轉子上則有兩個永磁極和多個可變磁阻極。
2023-03-08 16:10:343837 混合式步進電機是兼具VR型和PM型電機優點的步進電機。VR(Variable Reluctance)型電機使用齒輪狀的鐵芯作為轉子。其優點是可以通過機械加工減小步距角,缺點是轉矩稍低,難以同時實現
2023-03-10 09:12:361433 
、發熱大,可靠
性難以保證。
永磁式
永磁式步進電機的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機度
差,步距角大(一般為7.5度或15度)。
混合式
混合式步進電機綜合了反應式和永磁式的
2023-03-21 13:58:091 步進電機圈數測試下面代碼已經修改過,圈數改為1圈
2023-03-21 15:01:431 兩相混合式步進電機數學模型 式中 Ls為自感,它與轉子的機械角位置 θ 有關。 由于混合式步進電機中磁芯造成很大的氣隙, 其可變磁阻對于輸出總力矩的貢獻可以忽略,式 (2)作為單相繞組等效電路
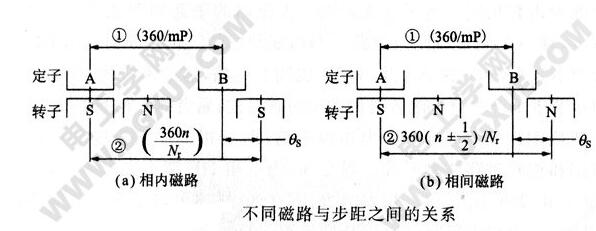
2023-03-22 09:52:400 和性能。本節將介紹其一般的關系式。
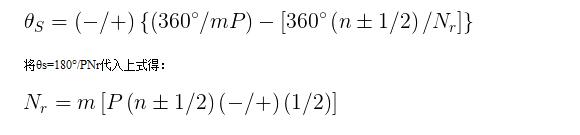
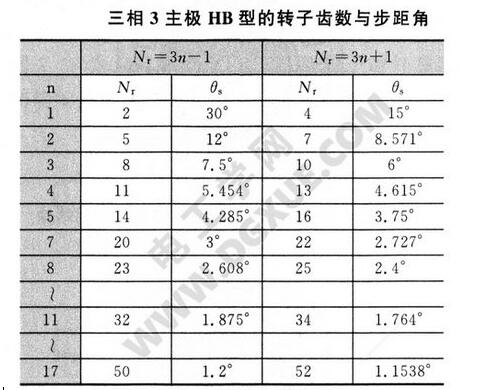
如 HB型步進電機為P相,轉子齒數Nr , 則依據式(2. 1) 可知其步距角0, 為 θs=180°/PNr 此時,定子1相主極數(AA相的總和)為m個,均勻配置,其內徑配的多個細齒齒數相同。轉子永久磁鐵產生磁通的磁路
2023-03-23 14:15:300 當步進電機切換一次定子繞組的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為
兩相以上的,當然也有一些特殊的只有一個
2023-03-24 11:16:5742 目錄在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真 閉環矢量控制系統simulink圖? 閉環矢量控制系統系統結構框圖 二相混合式步進電機的數學模型 矩角特性 電壓方程
2023-03-24 10:30:592 反應式步進電機與混合式步進電機的區別如下:
1、在結構和材料上不同,混合式電機內部具有永久磁性材料,故混合式電機有自阻(即在電機未加電的情況下有一定的自鎖力),而反應式電機沒有自阻。
2、在運行性能上有差別,混合式電機運行時相對較平穩,輸出力矩相對較大,運行聲音小。
2023-03-27 15:42:331840 選擇步進電機時首先要考慮各種步進電機的優缺點,根據設備的具體要求選擇合適的電機。在這里先介紹不同相數的步進電機的優缺點:??一、兩相PM型步進電機??1、優點:??(1)便宜。一般比同等大小的HB型
2023-04-28 09:53:442487 
選擇步進電機時首先要考慮各種步進電機的優缺點,根據設備的具體要求選擇合適的電機。在這里先介紹不同相數的步進電機的優缺點:
2023-07-21 17:27:111477 的品種也非常繁多。對于工業應用來說,每轉 200 步的兩相混合式步進電機最為常見。這里的 “混合” 是指它利用永磁體和帶齒鐵轉子的工作方式(例如可變磁阻電機),而 “200 步” 則指電機每步移動 1.8°,該步數為轉子和定子上齒數的函數
2023-08-23 15:22:552641 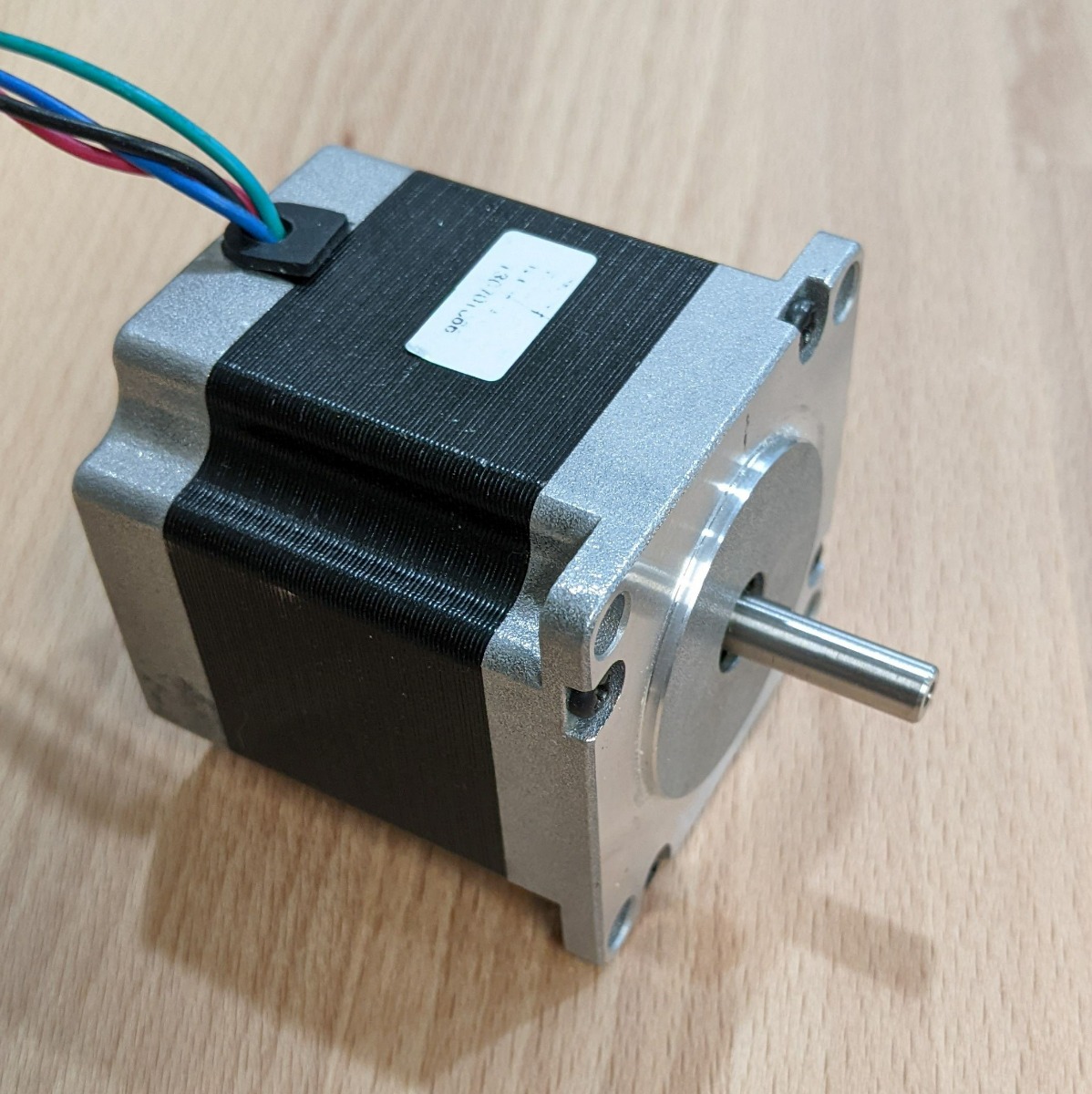
電機的極數是一個重要的技術參數,它決定了電機的結構和工作原理,并且對電機的性能和應用有著直接的影響。本文將深入探討電機極數的意義以及2極、4極、6極和8極電機之間的區別。
2023-11-27 10:15:224168 電機的極數是指電機內部磁極或繞組的數量。它直接決定了電機的轉速、轉矩、效率等關鍵性能參數。這是因為電機的極數會影響電機的輸出功率和轉速。
2023-11-27 10:14:323885 ? ? ? 電機的極數就是電動機的磁極數,磁極分N極和S極,一般磁極數是成對出現,如2極電機,4極電機,,一般把1個N極和1個S極稱為一對磁極,也就是極對數為1。 ? ? ? 極數反映出電動機的同步
2023-12-19 08:36:4110815 齒輪是機械傳動中常用的一種元件,用于傳遞轉矩和轉速。齒輪的設計與制造是機械工程中的重要課題之一,而齒輪的模數和齒數是齒輪設計中最基本的參數之一。本文將詳細討論齒輪的模數和齒數的關系,以及它們對于齒輪
2024-01-19 10:17:3713422 如何確定感應電機的極數?電機極數和電流有關系嗎 感應電機的極數是指轉子上的極對數,或者可以說是轉子上磁極個數的兩倍。在感應電機中,極數是一個重要的參數,它決定了電機的旋轉速度和輸出功率,并且對電機
2024-02-01 14:26:342944 
混合式步進電機(Hybrid Stepper Motor)結合了永磁式和變極式步進電機的特點,以實現高性能和高可靠性。 合式步進電機融合了可變磁阻(VR)型步進電機和永磁(PM)型步進電機的優勢,以
2024-02-06 10:01:462113 
在工業自動化與精密控制領域,步進電機以其高精度、高可靠性和良好的調速性能得到了廣泛應用。其中,混合式步進電機作為一種結合了永磁式和反應式步進電機優點的電機類型,更是憑借其獨特的性能特點在多個領域
2024-06-06 15:54:272646 在工業自動化和精密控制領域,步進電機因其精確的步進控制和易于實現的開環控制而廣受歡迎。步進電機主要分為兩大類:永磁式步進電機和反應式步進電機。然而,隨著技術的發展,一種新型的步進電機——混合式步進
2024-10-22 13:48:392057 1. 引言 步進電機是一種將電脈沖信號轉換為角位移或線位移的電機。它廣泛應用于需要精確控制位置和速度的場合,如數控機床、機器人、打印機等。混合式步進電機作為步進電機的一種,因其獨特的結構和性能,在
2024-10-22 13:52:051311 混合式步進電機是一種將永磁式和反應式步進電機的優點結合起來的電機類型。它具有較高的輸出力矩和較高的步距精度,因此在許多應用中得到了廣泛的應用。 一、混合式步進電機的結構 混合式步進電機主要由以下幾個
2024-10-22 13:53:561640 電子發燒友網站提供《三相混合式步進電機驅動電源.pdf》資料免費下載
2024-11-20 16:54:522
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論