基本邏輯指令的編程實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康?
1、掌握FX2系列PLC基本邏輯指令的用
2007-12-26 22:35:09 4516
4516 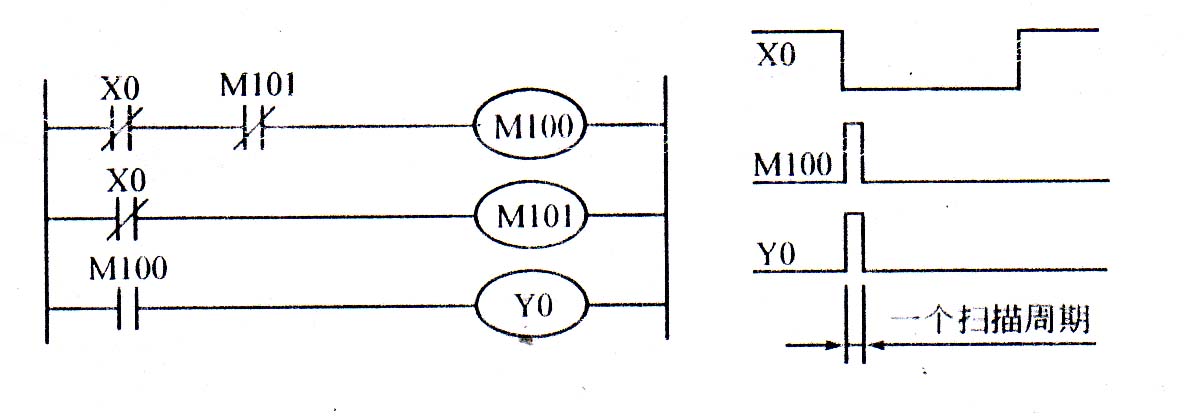
西門子s7-200SAMRT的位邏輯指令,在PLC中位邏輯指令是使用最頻繁的,除云一些非常特殊的程序段以外,可以說(shuō)每一個(gè)梯形圖程序段都離不開(kāi)位邏輯指令。顧名思義,位邏輯指令操作的對(duì)象是存寄存器
2022-09-21 09:56:567509 基本邏輯指令以位邏輯操作為主,在位邏輯指令中,除非有特殊說(shuō)明,操作數(shù)的有效區(qū)域?yàn)椋篒、Q、M、SM、T、C、V、S、L且數(shù)據(jù)類型為BOOL觸點(diǎn)和線圈指令又分為:標(biāo)準(zhǔn)指令、立即指令、取反指令、正(負(fù))跳變指令。
2022-10-12 15:57:382127 位邏輯指令符號(hào)與繼電器電路符號(hào)聯(lián)系。
2023-03-21 15:02:553265 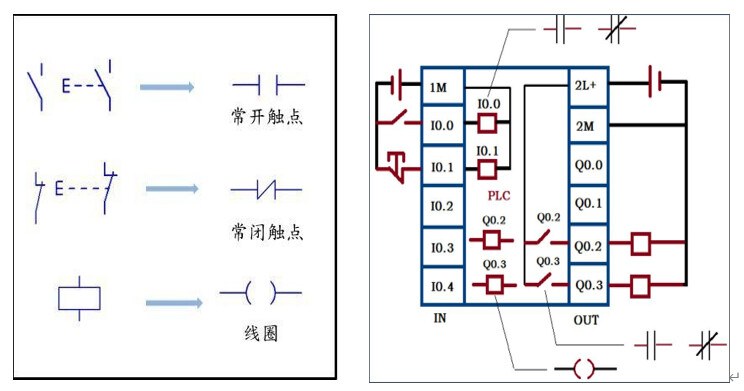
基本指令是PLC最常用的指令,主要包括位邏輯指令、定時(shí)器指令和計(jì)數(shù)器指令
2023-11-29 14:10:2017629 
位及位操作指令通過(guò)前面那些流水燈的例子,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用“字節(jié)”來(lái)介紹的:字節(jié)的移動(dòng)、加法、減法、邏輯運(yùn)算、移位等等。用字節(jié)來(lái)處理一些數(shù)學(xué)
2011-04-13 09:34:46
這類指令是對(duì)字節(jié)、字或雙字的各位分別同時(shí)進(jìn)行邏輯運(yùn)算的指令。有的PLC沒(méi)有字節(jié)邏輯運(yùn)算指令。S7-200的取反(求反碼)指令將輸入變量中的二進(jìn)制數(shù)逐位取反,即各位由0變?yōu)?,由1變?yōu)?(見(jiàn)圖
2020-12-22 16:22:22
對(duì)累加器A的邏輯操作:CLRA ;將A中的值清0,單周期單字節(jié)指令,與MOV A,#00H效果相同。CPLA ;將A中的值按位取反RLA ;將A中的值邏輯左移 RLCA ;將A中的值加上進(jìn)位位進(jìn)行
2011-04-13 09:40:02
邏輯運(yùn)算類指令有哪些?數(shù)據(jù)傳遞類指令有哪些?算術(shù)運(yùn)算類指令有哪些?
2021-10-13 08:27:19
BIC指令將< shifter_operand > 表示的數(shù)值與寄存器< Rn >值的反碼按位做邏輯與操作,并把結(jié)果保存到目標(biāo)寄存器< Rd > 中,同時(shí)根據(jù)操作
2021-12-22 06:23:03
單片機(jī)邏輯與或異或指令,這幾條指令的關(guān)鍵是知道什么是邏輯與。這里的邏輯與是指按位與ANL A,Rn ;A與Rn中的值按位'與',結(jié)果送入A中ANL A,direct ;A與direct中的值按位
2011-11-16 11:54:18
ORR指令將< shifter_operand > 表示的數(shù)值與寄存器< Rn >值按位做邏輯或操作,并把結(jié)果保存到目標(biāo)寄存器< Rd > 中,同時(shí)根據(jù)操作的結(jié)果
2021-12-22 06:51:59
TST指令將< shifter_operand > 表示的數(shù)值與寄存器< Rn >的值按位做邏輯與操作,根據(jù)操作的結(jié)果更新CPSR中相應(yīng)的條件標(biāo)志位。指令的編碼格式指令的語(yǔ)法
2021-12-21 06:33:55
位邏輯指令概述位邏輯指令使用兩個(gè)數(shù)字 1 和 0。這兩個(gè)數(shù)字構(gòu)成二進(jìn)制系統(tǒng)的基礎(chǔ)。這兩個(gè)數(shù)字 1和 0 稱為二進(jìn)制數(shù)字或位。對(duì)于觸點(diǎn)和線圈而言,1 表示已激活或已勵(lì)磁,0 表示未激活或未勵(lì)磁。位邏輯
2020-12-22 16:02:21
;direct中的值與立即數(shù)data按位'與',結(jié)果送入direct中。這幾條指令的關(guān)鍵是知道什么是邏輯與。這里的邏輯與是指按位與例:71H和56H相與則將兩數(shù)寫成二進(jìn)制形式:(71H
2018-06-14 18:22:42
前面那些流水燈的例程,我們已經(jīng)習(xí)慣了“位”一位就是一盞燈的亮和滅,而我們學(xué)的指令卻全都是用“字節(jié)”來(lái)介紹的:字節(jié)的移動(dòng)、加法、減法、邏輯運(yùn)算、移位等等。用字節(jié)來(lái)處理一些數(shù)學(xué)問(wèn)題,比如說(shuō):控制
2018-06-15 10:59:33
SAM88RCRI 指令集支持寄存器卷操作,它可完成8 位算術(shù)操作和邏輯操作,共有41條指令集。由于采用了存貯器影射方式,所以沒(méi)有具體的I/O 口操作指令。指令支持位操作,循環(huán)、移
2008-11-27 11:06:51 34
34 基本邏輯指令、定時(shí)器、計(jì)數(shù)器指令的使用
有一臺(tái)11KW的三相異步電動(dòng)機(jī),原來(lái)采用繼電接觸系統(tǒng)實(shí)現(xiàn)電動(dòng)機(jī)的正反轉(zhuǎn)控制,現(xiàn)要改裝為PLC控制,請(qǐng)完成以下要求:
1)
2009-06-14 10:30:550 ANDB (字節(jié)與) 指令對(duì)兩個(gè)輸入字節(jié)按位與 得到一個(gè)字節(jié)結(jié)果 (OUT)ORB (字節(jié)或) 指令對(duì)兩個(gè)輸入字節(jié)按位或 得到一個(gè)字節(jié)結(jié)果 (OUT)XORB (字節(jié)異或) 指令對(duì)兩個(gè)輸入字節(jié)按位異或得
2010-10-08 07:58:5524 9.16 SIMATIC 邏輯堆棧指令棧裝載與 (ALD)ALD 指令對(duì)堆棧中的第一層和第二層的值進(jìn)行邏輯與操作結(jié)果放入棧頂執(zhí)行完 ALD 指令后堆棧深度減 1操作數(shù) 無(wú)棧裝載或 (OLD)OLD
2010-11-04 22:39:5540 邏輯運(yùn)算和移位指令共有25條,有與、或、異或、求反、左右移位、清0等邏輯操作,有直接、寄存器和寄存器間址等尋址方式。這類指令一般不影響程序狀態(tài)字(PSW)標(biāo)志。&nb
2006-04-03 22:44:432672 置位/復(fù)位及脈沖指令實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康?、 熟悉置位/復(fù)位及脈沖指令的使用。2、 掌握PLC 實(shí)驗(yàn)臺(tái)輸出負(fù)載指
2008-09-23 08:02:075570 
TMS320F24X 指令集累加器、算術(shù)與邏輯指令附件
TMS320F24X 指令集累加器、算術(shù)與邏輯指令
助記
2008-10-17 22:41:111360 邏輯操作指令
邏輯操作類指令共有效25條,有與、或、異或、求反、左右移位、清0等邏輯操作,對(duì)應(yīng)的尋址方式有直接、寄存器和間接尋址,該類指令的執(zhí)行一般不影響PSW。
2009-03-14 15:34:252121 位操作指令
位操作類指令共有17條,均以位為操作對(duì)象,分別完成位傳送、位狀態(tài)控制、位邏輯運(yùn)算、位條件轉(zhuǎn)移等功能,在匯編語(yǔ)言中,位地址的表示方式有以下4種:
2009-03-14 15:35:304436
由邏輯指令控制增益的放大器
2009-03-20 11:15:12703 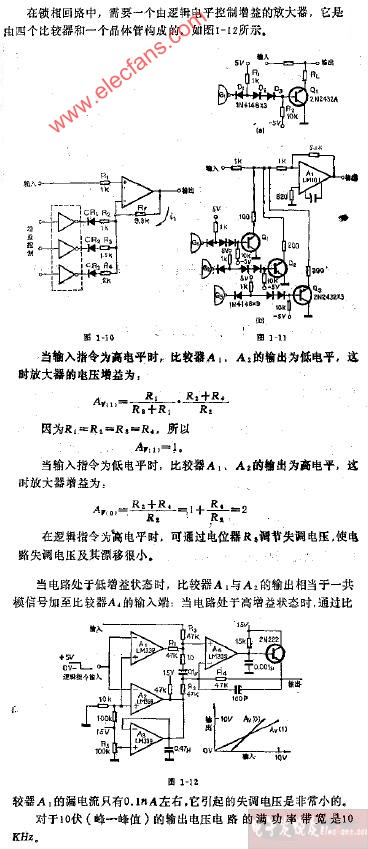
助記符 程序元素目錄 描述 ---| |--- ---| |--- 位邏輯指令 常開(kāi)觸點(diǎn)(地址) ---|/|--- ---|/|--- 位邏輯指令 常閉觸點(diǎn)(地址) ---( ) ---( ) 位邏輯指令 輸出線圈 ---(#)--- ---(#)--- 位邏輯指令 中間輸出
2011-04-18 15:03:580 邏輯運(yùn)算與移位指令:8086/8088CPU的指令系統(tǒng)提供8位和16位的邏輯運(yùn)算與移位指令有3組。 邏輯運(yùn)算指令 AND/OR/XOR/NOT/TEST 移位指令 SHL/SHR/SAL/SAR 循環(huán)移位指令 ROL/ROR/RCL/RCR 一、邏輯運(yùn)算指令
2011-07-03 23:52:220 可編程控制器實(shí)驗(yàn)教程之位邏輯指令實(shí)驗(yàn),很好的學(xué)習(xí)資料。
2016-04-19 13:57:230 位邏輯指令處理兩個(gè)數(shù)字,1和0。這兩個(gè)數(shù)字構(gòu)成二進(jìn)制數(shù)字系統(tǒng)的基礎(chǔ)。這兩個(gè)數(shù)字1和0稱為二進(jìn)制數(shù)字或二進(jìn)制位。在接點(diǎn)與線圈領(lǐng)域,1表示動(dòng)作或通電,0表示未動(dòng)作或未通電。位邏輯指令掃描信號(hào)狀態(tài)1 和0,并根據(jù)布爾邏輯對(duì)它們進(jìn)行組合。這些組合產(chǎn)生結(jié)果1或0,稱為邏輯運(yùn)算結(jié)果(RLO)。
2017-09-29 14:02:096 6.2 EOR邏輯異或指令 1.指令的編碼格式 邏輯異或EOR(Exclusive OR)指令將寄存器《Rn》中的值和《shifter_operand》的值執(zhí)行按位異或操作,并將執(zhí)行結(jié)果存儲(chǔ)到目的
2017-10-18 13:38:161 6.13 ORR邏輯或指令 1.指令的編碼格式 ORR(Logical OR)為邏輯或操作指令,將第二個(gè)源操作數(shù)《shifter_operand》的值與寄存器Rn的值按位做邏輯或操作,結(jié)果保存到Rd
2017-10-18 14:48:092 6.14 BIC位清零指令 1.指令的編碼格式 BIC(Bit Clear)位清零指令,將寄存器Rn的值與第二源操作數(shù)《shifter_operand》的值的反碼按位做邏輯與操作,結(jié)果保存到Rd中
2017-10-18 17:03:461 流水線中增加了Thumb指令解碼邏輯,該解碼邏輯將預(yù)取的Thumb指令轉(zhuǎn)換成等價(jià)的ARM指令。圖11.66顯示了Thumb指令的擴(kuò)展邏輯組織。 從圖11.66可以看出,Thumb指令增加了解碼擴(kuò)展邏輯(Decompressor)與指令譯碼器串連,但這并不會(huì)增加指令的譯碼時(shí)間。在指令流水線譯碼周期的第一階段只做了很少的工
2017-10-19 09:34:140 Thumb數(shù)據(jù)處理指令 數(shù)據(jù)處理指令是指那些操作寄存器中數(shù)據(jù)的指令。Thumb指令集中的數(shù)據(jù)處理指令是ARM指令集數(shù)據(jù)處理指令的一個(gè)子集,其中包括MOV指令、算術(shù)指令、移位指令、邏輯指令、比較指令
2017-10-19 10:04:040 對(duì)單片機(jī)的累加器A的邏輯操作: CLR A ;將A中的值清0,單周期單字節(jié)指令,與MOV A,#00H效果相同。 CPL A ;將A中的值按位取反 RL A ;將A中的值邏輯左移 RLC A ;將A
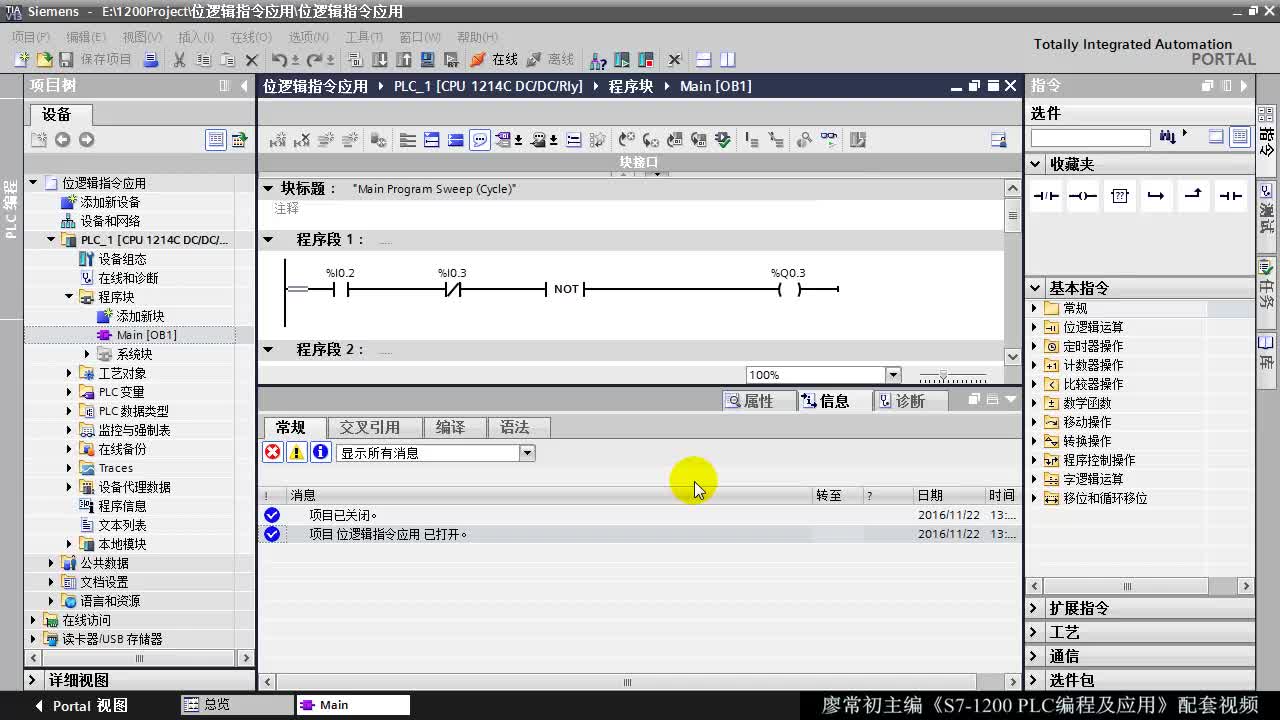
2017-11-22 12:20:01526 1、位邏輯指令
1.1 -||- 常開(kāi)接點(diǎn)(地址) 1.2 -|/|- 常閉接點(diǎn)(地址) 1.3 XOR 位異或 1.4 -|NOT|- 信號(hào)流反向 1.5
2018-05-27 09:04:1235945 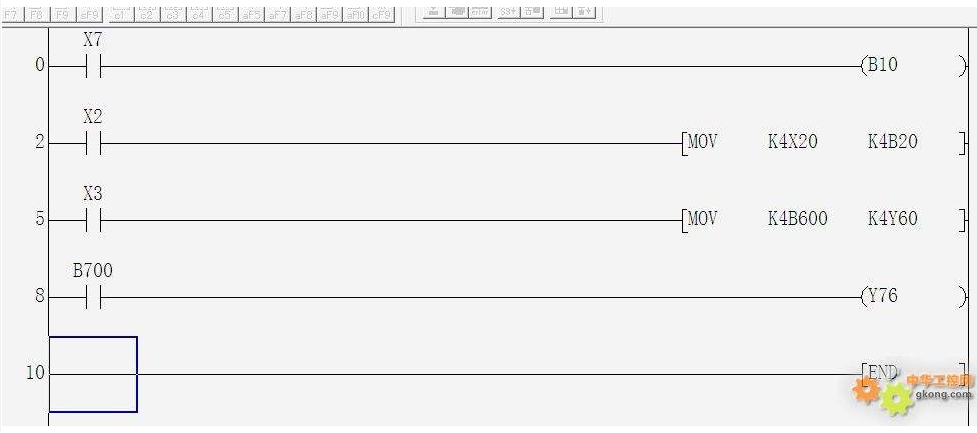
三菱PLC FX系列的基本邏輯指令、FX系列PLC的步進(jìn)指令
2019-03-07 16:07:2211218 位邏輯指令是以數(shù)字1和0進(jìn)行工作的。這二個(gè)數(shù)字構(gòu)成了二進(jìn)制數(shù)字系統(tǒng)的基礎(chǔ)。1和0稱為二進(jìn)制數(shù)字或位。
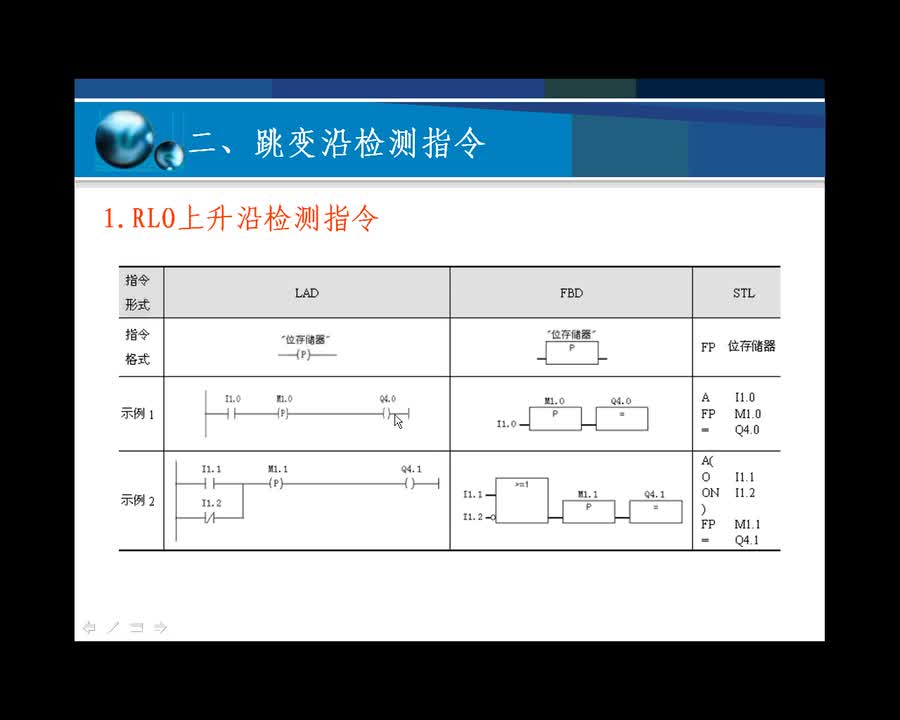
2020-03-15 15:48:0013827 以后程序每執(zhí)行到該邊沿指令,用記下的前一次的位邏輯值和當(dāng)前的位邏輯值,以決定輸出結(jié)果,同時(shí)再記下當(dāng)前的位邏輯值,供下次使用。
2021-03-24 15:18:507721 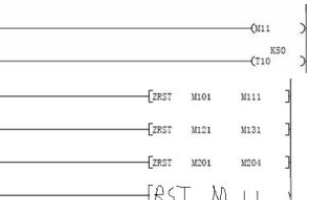
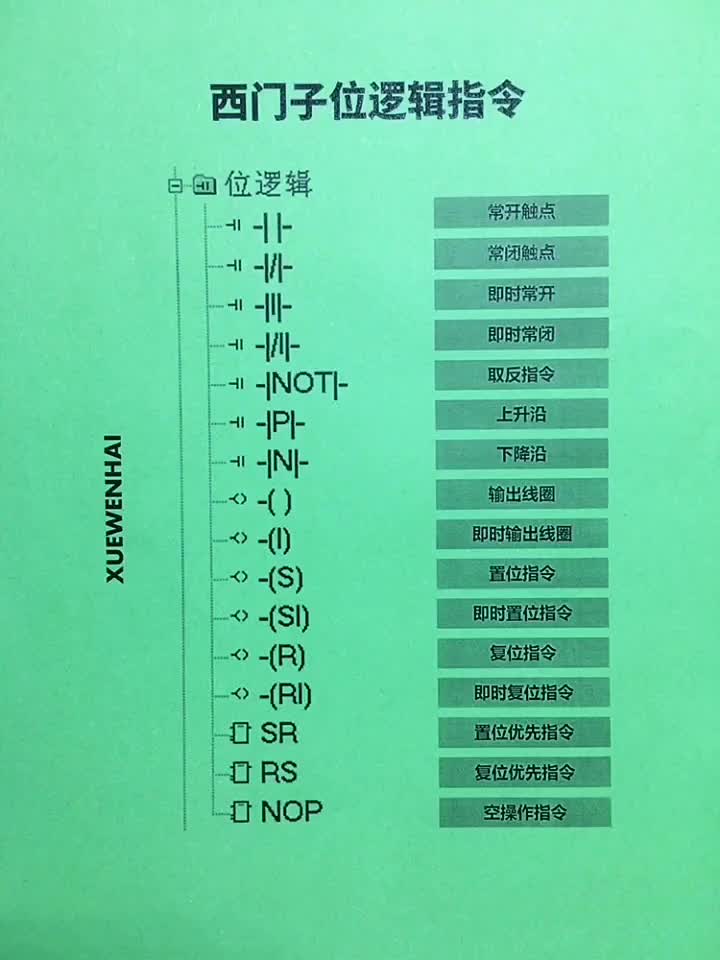
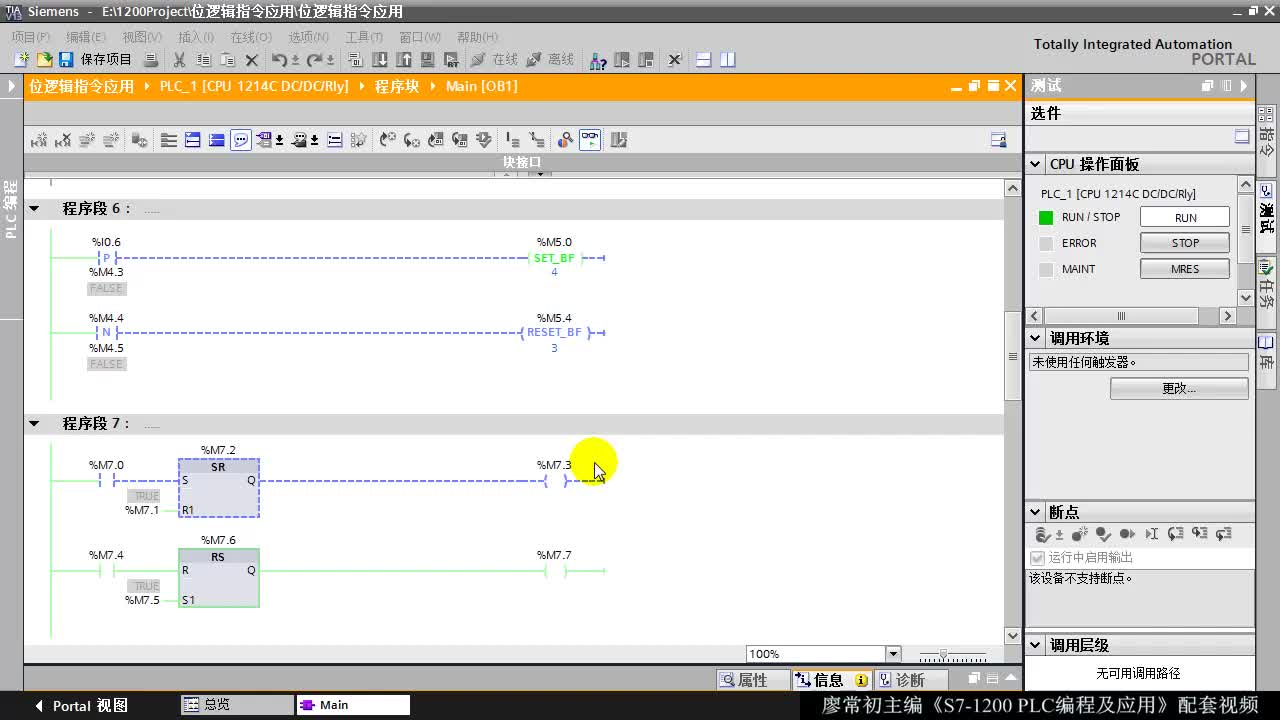
標(biāo)準(zhǔn)位邏輯指令包括常開(kāi)觸點(diǎn)、常閉觸點(diǎn)和輸出線圈指令;置位/復(fù)位指令包括置位指令、復(fù)位指令、置位優(yōu)先RS觸發(fā)器指令和復(fù)位優(yōu)先RS觸發(fā)器指令;
2021-06-13 15:41:0019236 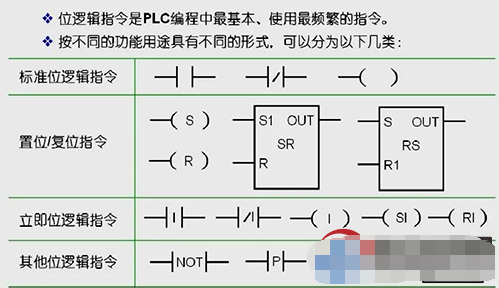
文章目錄前言一、簡(jiǎn)單操作指令 CLR、CPL、SWAPCLR ACPL ASWAP A二、位移指令 RL、RR、RLC、RRCRL ARR ARLC ARRC A三、邏輯“與”指令 ANLANL A
2021-11-12 09:06:03451 51系統(tǒng)指令中算術(shù)運(yùn)算有加、進(jìn)位加…等指令邏輯運(yùn)算有與、或、異或等…算術(shù)運(yùn)算和邏輯運(yùn)算指令對(duì)標(biāo)志位的影響:PSW寄存器中有四個(gè)測(cè)試標(biāo)志位:P(奇偶)、OV(溢出)、CY(進(jìn)位)、AC(輔助進(jìn)位)對(duì)于
2021-11-23 16:21:112 這篇博客的內(nèi)容是指令系統(tǒng)的另一部分,上部分請(qǐng)看上篇博客。單片機(jī)指令系統(tǒng)(1)目錄?三、邏輯操作類指令1 邏輯“與”指令2 邏輯“或”指令3 邏輯“異或”指令4 循環(huán)移位指令5 取反指令6 清0指令四
2021-12-17 18:34:161 標(biāo)志Cy來(lái)存放邏輯運(yùn)算結(jié)果,大部分操作都涉及Cy,因此它相當(dāng)于布爾處理機(jī)的“累加器”,稱為位累加器,用符號(hào)C表示。(1) 位傳送指令MOV C,bit ...
2022-01-13 13:54:283 位邏輯指令處理數(shù)字1和0。這兩個(gè)數(shù)字構(gòu)成了二進(jìn)制數(shù)字系統(tǒng)的基礎(chǔ)。和0被稱為二進(jìn)制數(shù)字或位。在“觸點(diǎn)”和“線圈”代表的系統(tǒng)中,1表示“激活”或“能量激發(fā)”,0表示“不激活”或“能量激發(fā)”。 用位邏輯
2022-01-14 10:12:154351 到 PLC可以識(shí)別的語(yǔ)言,就是各種編程指令,熟練的掌握編程指令是學(xué)習(xí)使用PLC的基礎(chǔ),今天就重點(diǎn)來(lái)看看PLC常用的邏輯指令和具體的使用方法!
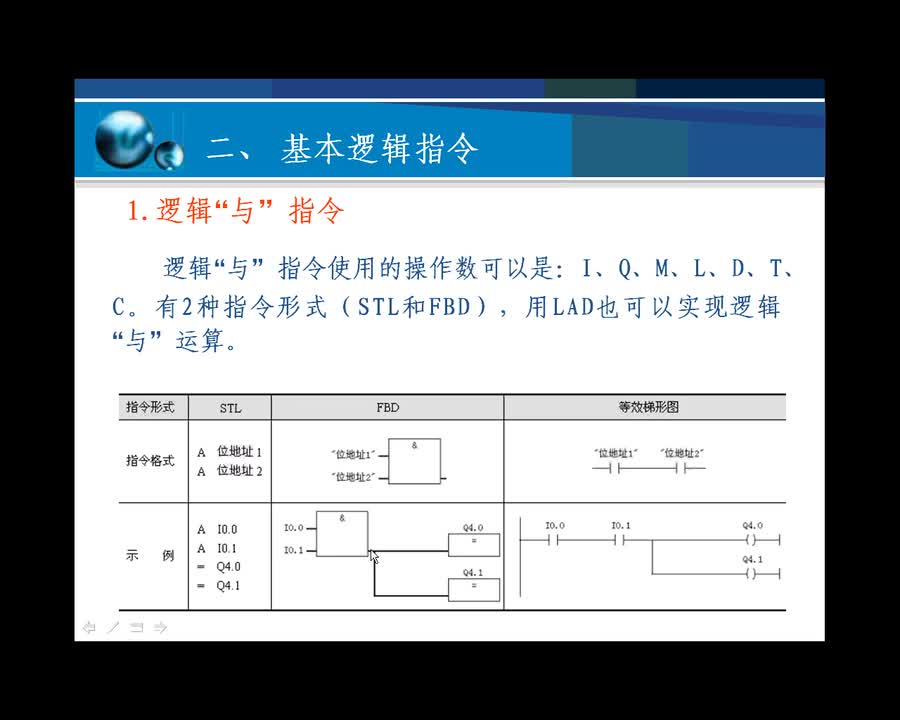
2022-10-26 16:54:262246 基本邏輯指令以位邏輯操作為主,在位邏輯指令中,除非有特殊說(shuō)明,操作數(shù)的有效區(qū)域?yàn)椋篒、Q、M、SM、T、C、V、S、L且數(shù)據(jù)類型為BOOL觸點(diǎn)和線圈指令又分為:標(biāo)準(zhǔn)指令、立即指令、取反指令、正(負(fù))跳變指令。
2022-10-27 14:28:593577 吧,要想學(xué)會(huì)編程,邏輯指令必不可少,可以不夸張的說(shuō),邏輯指令就是PLC編程的語(yǔ)言,今天我們就重點(diǎn)來(lái)看一下PLC常用的20個(gè)邏輯指令。
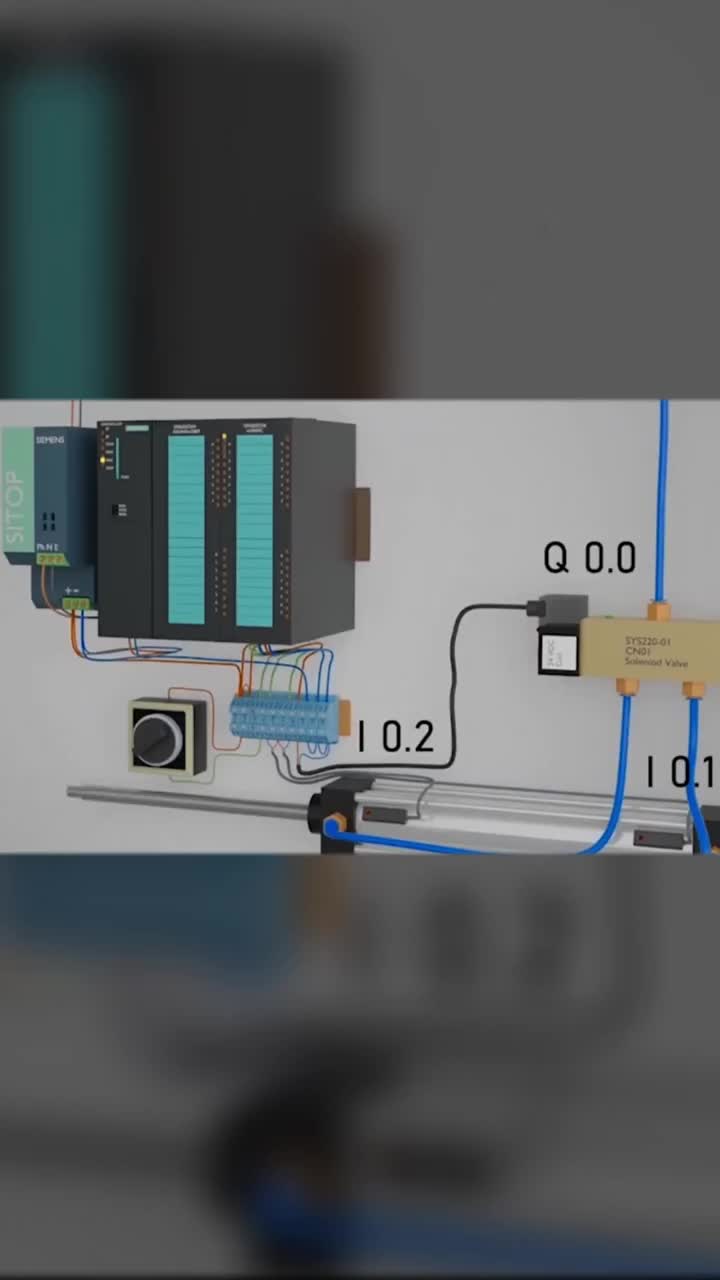
2023-02-08 14:29:194849 對(duì)于剛?cè)腴T的PLC新手來(lái)說(shuō),在沒(méi)有理解PLC CPU的掃描工作原理時(shí)對(duì)于行內(nèi)偶爾提到的一鍵啟停程序編寫總會(huì)有一定的難度!采用位邏輯指令結(jié)合PLC工作原理實(shí)現(xiàn)一鍵啟停的程序編寫
2023-02-09 15:02:135174 位邏輯運(yùn)算符與位邏輯表達(dá)式可以實(shí)現(xiàn)位的編輯,比如位的清零、設(shè)置、取反和取補(bǔ)等操作。使用位邏輯運(yùn)算符與位邏輯表達(dá)式可以在不使用匯編的情況下實(shí)現(xiàn)部分匯編的功能
2023-02-21 15:22:152271 
采用位邏輯指令結(jié)合PLC工作原理實(shí)現(xiàn)一鍵啟停的程序編寫。
怎樣才能開(kāi)始掌握PLC一鍵啟停不同方式的程序編寫呢?
2023-03-14 11:39:161799 PLC指令是可編程邏輯控制器(PLC)的指令集,也稱為PLC編程指令。這些指令是用于編寫和控制PLC程序的基本構(gòu)建塊,它們包括輸入和輸出指令、邏輯指令、數(shù)據(jù)處理指令、定時(shí)器和計(jì)數(shù)器指令、數(shù)值比較指令等等。
2023-03-15 14:12:4118030 PLC指令是可編程邏輯控制器(PLC)的指令集,也稱為PLC編程指令。這些指令是用于編寫和控制PLC程序的基本構(gòu)建塊,它們包括輸入和輸出指令、邏輯指令、數(shù)據(jù)處理指令、定時(shí)器和計(jì)數(shù)器指令、數(shù)值比較指令等等。PLC(可編程邏輯控制器)可以用于編寫程序的指令,控制程序中執(zhí)行的操作。
2023-03-15 14:36:205682 PLC指令是可編程邏輯控制器(PLC)的指令集,也稱為PLC編程指令。PLC指令是用于編程可編程邏輯控制器(PLC)的命令,它可以通過(guò)編寫PLC程序來(lái)控制實(shí)際生產(chǎn)過(guò)程。PLC指令由以下組成:
2023-03-15 16:49:573525 輸出線圈不能直接驅(qū)動(dòng)現(xiàn)場(chǎng)的執(zhí)行元件,通過(guò)I/模塊上的功率器件來(lái)驅(qū)動(dòng)。基本邏輯指令以位邏輯操作為主,在位邏輯指令中,除非有特殊說(shuō)明,操作數(shù)的有效區(qū)域?yàn)椋篒、Q、M、SM、T、C、V、S、L且數(shù)據(jù)類型為BOOL觸點(diǎn)和線圈指令又分為:標(biāo)準(zhǔn)指令、立即指令、取反指令、正(負(fù))跳變指令。
2023-03-25 10:00:572806 位邏輯指令用于二進(jìn)制數(shù)的邏輯運(yùn)算。位邏輯運(yùn)算的結(jié)果簡(jiǎn)稱為RLO。
2023-03-31 10:00:264407 程序設(shè)計(jì)思路及參考程序: 設(shè)計(jì)思路: 從示例要求分析,要求一個(gè)按鈕分別啟停4臺(tái)電機(jī),可以分為啟動(dòng)和停止兩部分去實(shí)現(xiàn)。
2023-04-17 11:41:351502 基本指令
邏輯取及驅(qū)動(dòng)線圈指令LD、LDI、OUT
觸電串、并聯(lián)指令AND、ANI、OR、ORI
電路塊連接指令ANB、ORB
置位與復(fù)位指令SET、RST
空操作和程序結(jié)束指令要素表
2023-04-18 09:36:491 ,為西門子S7-200各型號(hào)PLC的存儲(chǔ)器范圍值。 ? 2.S7-200CPU操作數(shù)范圍下圖為CPU操作數(shù)范圍 ? 3. 位邏輯指令位邏輯指令如下圖,有很多個(gè),我們 一個(gè)一個(gè)來(lái)解讀 。 ? 1.觸點(diǎn)指令
2023-04-19 11:07:0713 1、位邏輯指令 1.1 -||- 常開(kāi)接點(diǎn)(地址)
1.2 -|/|- 常閉接點(diǎn)(地址)
1.3 XOR 位異或
1.4 -|NOT|- 信號(hào)流反向
1.5
2023-05-16 12:32:555497 基本邏輯指令以位邏輯操作為主,在位邏輯指令中,除非有特殊說(shuō)明,操作數(shù)的有效區(qū)域?yàn)椋篒、Q、M、SM、T、C、V、S、L且數(shù)據(jù)類型為BOOL觸點(diǎn)和線圈指令又分為:標(biāo)準(zhǔn)指令、立即指令、取反指令、正(負(fù))跳變指令。
2023-05-30 10:11:005370 
輸出線圈不能直接驅(qū)動(dòng)現(xiàn)場(chǎng)的執(zhí)行元件,通過(guò)I/模塊上的功率器件來(lái)驅(qū)動(dòng)。基本邏輯指令以位邏輯操作為主,在位邏輯指令中,除非有特殊說(shuō)明,操作數(shù)的有效區(qū)域?yàn)椋篒、Q、M、SM、T、C、V、S、L且數(shù)據(jù)類型為BOOL觸點(diǎn)和線圈指令又分為:標(biāo)準(zhǔn)指令、立即指令、取反指令、正(負(fù))跳變指令。
2023-06-06 17:08:592093 
西門子PLC編程指令 1、位邏輯指令 1.1 -||- 常開(kāi)接點(diǎn)(地址) 1.2 -|/|- 常閉接點(diǎn)(地址) 1.3 XOR 位異或 1.4 -|NOT|- 信號(hào)流反向 1.5 -( ) 輸出
2023-08-23 10:16:553912 
首先我們了解一下歐姆龍CMP指令,CMP指令是一種用于比較兩個(gè)數(shù)值的指令,常用于控制系統(tǒng)中的邏輯判斷和決策。該指令可以比較兩個(gè)16位的數(shù)據(jù),如果它們相等,則將零標(biāo)志位設(shè)置為1,否則將其清零。
2023-08-23 11:12:596915 
與指令的功能是將IN1、IN2端指定單元的數(shù)據(jù)按位相與,結(jié)果存入OUT端指定的單元中。與指令可分為字節(jié)與指令、字與指令和雙字與指令。
2023-12-08 16:12:066329 
有關(guān)三菱PLC置位與復(fù)位指令的功能說(shuō)明,以FX2N為例,介紹其基本邏輯指令和步進(jìn)指令及用法,置位與復(fù)位指令(SET/RST),SET 、RST指令的使用說(shuō)明。
2023-12-26 10:19:417850 
“置位”和“復(fù)位”指令如何使用?對(duì)比PMC,有何不同 “置位”和“復(fù)位”是常見(jiàn)于計(jì)算機(jī)科學(xué)和電子領(lǐng)域的指令,用于控制和操作系統(tǒng)、芯片或其他電子設(shè)備的狀態(tài)。在不同的情況下,“置位”和“復(fù)位”指令具有
2024-02-18 15:14:0214503 
PLC(可編程邏輯控制器)中的左移指令和右移指令是數(shù)據(jù)處理中常用的指令,用于將數(shù)據(jù)中的位向左或向右移動(dòng)指定的位數(shù)。
2024-03-07 17:11:276319 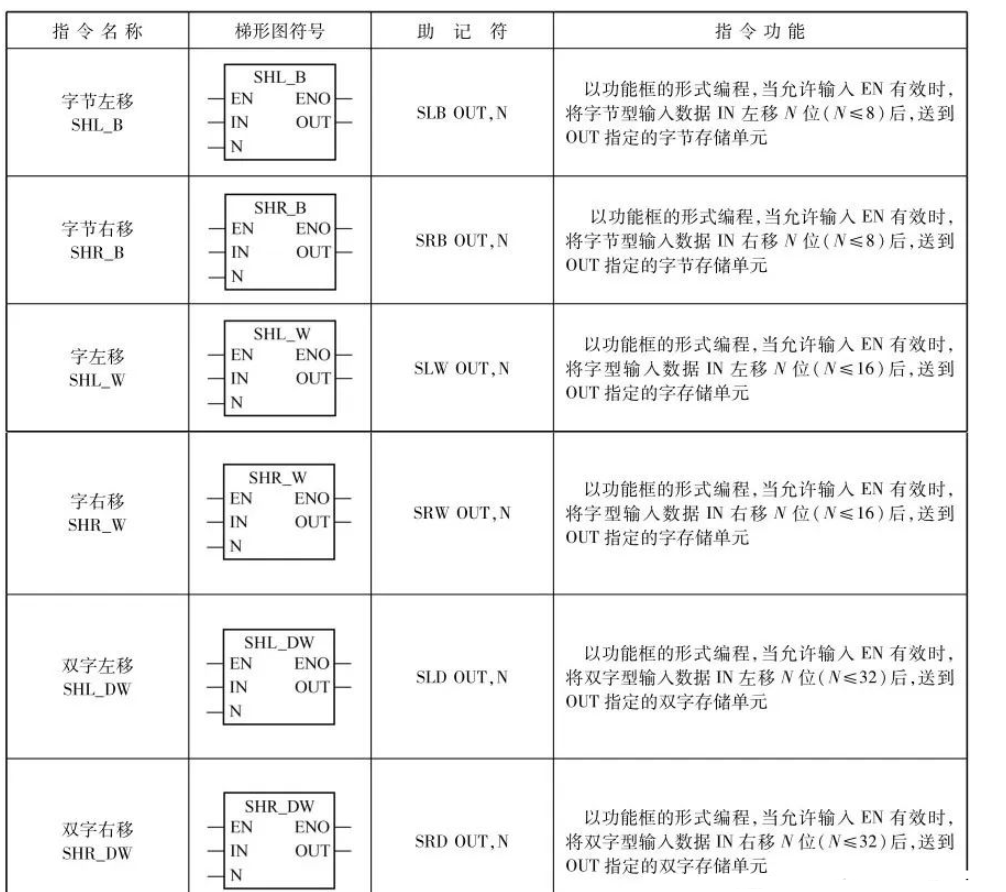
在PLC(可編程邏輯控制器)中,左移(Shift Left)指令和右移(Shift Right)指令通常用于位級(jí)操作,對(duì)位寄存器中的位進(jìn)行移位操作。這些指令可以用于實(shí)現(xiàn)數(shù)據(jù)的移位和位操作功能。
2024-03-15 14:12:1610136 
?置位與復(fù)位指令(SET/RST) ?(1)SET(置位指令) 它的作用是使被操作的目標(biāo)元件置位并保持。 ?(2)RST(復(fù)位指令) 使被操作的目標(biāo)元件復(fù)位并保持清零狀態(tài)。SET、RST指令
2024-08-05 09:06:032760 PLC(可編程邏輯控制器)的基本指令是PLC編程語(yǔ)言的基本元素,用于描述PLC如何根據(jù)輸入信號(hào)的狀態(tài)控制輸出信號(hào)的變化,從而實(shí)現(xiàn)對(duì)機(jī)械設(shè)備的控制。PLC的基本指令涵蓋了邏輯運(yùn)算、定時(shí)控制、計(jì)數(shù)
2024-10-21 17:16:503972
 電子發(fā)燒友App
電子發(fā)燒友App


























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論