論上可以證明,對于過程控制的典型對象──“一階滯后+純滯后”與“二階滯后+純滯后”的控制對象,PID控制器是一種最優(yōu)控制。PID調(diào)節(jié)規(guī)律是連續(xù)系統(tǒng)動(dòng)態(tài)品質(zhì)校正的一種有效方法,它的參數(shù)整定方式簡便,結(jié)構(gòu)改變靈活(PI、PD、…)。
2018-03-16 13:56:59 29005
29005 
現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:(1)首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作;(2)僅加入比例控制環(huán)節(jié),直到系統(tǒng)對輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期;(3)在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
2018-11-26 16:01:0810325 PID-PID控制器參數(shù)整定與實(shí)現(xiàn)
2020-05-12 11:30:36
來確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便。即當(dāng)我們不完全了解一個(gè)系統(tǒng)和被控對象,或不能通過有效的測量手段來獲得系統(tǒng)參數(shù)時(shí),最適合采用PID控制技術(shù)。PID控制,實(shí)際中也有PI和PD控制。PID控制器就是
2017-12-21 14:18:13
時(shí)Dout會(huì)有非常尖的尖峰,這時(shí)就要對delError進(jìn)行限幅。在PID調(diào)節(jié)中,不允許出現(xiàn)很大的尖峰。 調(diào)好D后,NowVal會(huì)很好的跟隨TargetVal的變化而變化。 三、看圖整定參數(shù) 1-7
2020-06-23 14:54:44
PID參數(shù)的意義與整定方法資料
2015-07-31 09:17:31
PID控制的定義是什么?PID控制器參數(shù)整定的方法有哪些?
2021-09-28 08:00:16
PID基礎(chǔ)知識(shí)文章目錄PID基礎(chǔ)知識(shí)PID簡介PID控制的原理和特點(diǎn)PID控制器的參數(shù)整定PID控制案例4.1 案例一4.2案例二P、PD、PI控制器5.1 P 比例控制5.2 PI 積分控制5.3
2021-07-01 10:01:17
PID溫度控制參數(shù)整定的方法是什么?
2021-11-22 06:13:41
是專家系統(tǒng)或模糊算法與 PID 控制算法的簡單加和,他是專家系統(tǒng)或者模糊算法在 PID 控制器參數(shù)整定上的應(yīng)用。也就是說,...
2021-07-19 06:29:49
步驟。PID控制器參數(shù)整定的一般方法:PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括
2019-03-05 01:34:59
【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時(shí)延的被控對象目錄【Simulink】FOA優(yōu)化算法整定PID控制器參數(shù)(五)—— 一階帶時(shí)延的被控對象0研究背景1研究背景2
2021-08-30 06:46:44
Matlab PID控制資料.rar基于MATLAB下的PID控制仿真.pdf基于MATLAB的PID控制器設(shè)計(jì).pdf基于MATLAB的PID控制器參數(shù)整定及仿真.pdf基于MATLAB/Simulink環(huán)境下的PID參數(shù)整定.pdf
2011-07-07 09:30:13
SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-14 15:14:23
如何去實(shí)現(xiàn)STM32電機(jī)的PID參數(shù)整定?如何去編寫STM32電機(jī)的PID參數(shù)整定的代碼?
2021-09-23 08:07:13
【實(shí)驗(yàn)】SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-05 10:54:11
開關(guān)電源設(shè)計(jì)(第3版)[電子工業(yè)出版社][2010][519頁]09.PID控制器參數(shù)整定與實(shí)現(xiàn).haozip0110.PID控制器參數(shù)整定與實(shí)現(xiàn).haozip0211.工頻濾波電容選擇12.圖解
2017-02-16 11:01:07
本文主要介紹PID參數(shù)的作用原理,參數(shù)整定的經(jīng)典計(jì)算方法,通過看曲線整定PID參數(shù)的方法,串級(jí)控制、純滯后對象。回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-05 10:10:47
對系統(tǒng)特性的影響。3.研究電機(jī)調(diào)速系統(tǒng)PID控制器的參數(shù)的整定方法。二、實(shí)驗(yàn)儀器1.EL-AT-II型計(jì)算機(jī)控制系統(tǒng)實(shí)驗(yàn)箱一臺(tái)2.PC計(jì)算機(jī)一臺(tái)3.直流電...
2021-09-07 07:38:00
伺服電機(jī)控制器為何要整定?何時(shí)需要整定?
2021-09-29 06:11:22
模式。當(dāng)負(fù)載慣量已知時(shí),由用戶輸入目標(biāo)剛性和慣量律,系統(tǒng)自動(dòng)整定參數(shù)。負(fù)載變化范圍不能太大。:伺服電機(jī)控制器的參數(shù)整定翻譯自 SureServo Manual
2018-11-01 11:14:10
一直以來,關(guān)于PID整定都在進(jìn)行手動(dòng)調(diào)試,例如試湊法、1/4衰減曲線法、齊格勒-尼柯爾斯整定法等; 雖然上述方法都可以完成對參數(shù)的整定,但是需要非常豐富的調(diào)試經(jīng)驗(yàn)才能達(dá)到預(yù)期的目的。同時(shí),當(dāng)需要控制
2021-08-31 08:41:30
這種情況是怎么回事;求教下相關(guān)PID參數(shù)整定方法,涉及到溫度控制方面的。另外通過Autotunning PID參數(shù)調(diào)出PID整定向?qū)В?b class="flag-6" style="color: red">整定出來的參數(shù)在控制過程中,效果也不太好。
2015-05-05 16:20:33
(FIS Toolbox)與LabVIEW虛擬儀器開發(fā)軟件集成,研制出模糊參數(shù)自整定PID虛擬控制器,并實(shí)現(xiàn)了對非線性系統(tǒng)的實(shí)時(shí)測控。2 Fuzzy-PID控制策略 模糊參數(shù)自整定PID控制器以系統(tǒng)
2019-04-17 09:40:02
調(diào)節(jié)器YR-GFD和人工智能調(diào)節(jié)器YR-GND具有先進(jìn)的PID控制算法和自整定功能,使用者啟動(dòng)儀表自整定功能后,不需要人工干預(yù)就可以自動(dòng)算出最佳PID參數(shù),控制無超調(diào)和欠調(diào),PID參數(shù)還不用您手動(dòng)設(shè)置,趕緊去看看哦!!
2017-12-26 21:40:51
怎樣去調(diào)試永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器的參數(shù)?如何對Iq,Id進(jìn)行PID控制器的參數(shù)整定?
2021-09-23 09:12:48
轉(zhuǎn)帖用經(jīng)驗(yàn)法整定調(diào)節(jié)器參數(shù)又稱為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗(yàn)的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗(yàn)及控制過程的曲線形狀,直接對控制系統(tǒng)反復(fù)地、逐漸地試湊,最終
2017-11-14 09:06:47
微分項(xiàng); 6)注意所有調(diào)試均應(yīng)在最大爭載的情況下調(diào)試,這樣才能保證調(diào)試完的結(jié)果可以在全工作范圍內(nèi)均有效;PID控制器參數(shù)整定: PID控制器參數(shù)整定是控制系統(tǒng)設(shè)計(jì)核心內(nèi)容。它是被控過程特性確定PID控制器
2016-01-14 14:12:32
淺談增量式PID參數(shù)整定https://bbs.elecfans.com/jishu_260252_1_1.html
2012-08-18 09:50:39
在實(shí)際使用電機(jī)驅(qū)動(dòng)器控制電機(jī)的時(shí)候,PID的整定方法采用實(shí)驗(yàn)中的試湊法,但是電機(jī)的響應(yīng)曲線怎么獲得?
2016-11-17 17:45:25
PID yunrun.com.cn/tech/681.html用經(jīng)驗(yàn)法整定PID參數(shù)又稱為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗(yàn)的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗(yàn)
2018-01-04 21:07:26
如何去設(shè)計(jì)模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點(diǎn)?
2021-04-21 06:08:28
PID參數(shù)的虛擬控制器。將此控制器用于時(shí)控系統(tǒng),控制效果理想,魯棒性強(qiáng)。關(guān)鍵詞:模糊參數(shù)自整定PID MATLAB Simulink 基于LabVIEW與MATLAB的模糊參數(shù)自整定PID控制.pdf
2019-04-03 09:40:03
基于衰減頻率特性的PID參數(shù)優(yōu)化整定研究Researching the Tuning Optimization of PID Parameters Based on Attenuated Frequency Characteristi
摘要:用衰減頻率特性法整定PID控制器可使閉環(huán)系統(tǒng)獲
2009-01-11 12:06:33 19
19 基于FPGA 的神經(jīng)網(wǎng)絡(luò)自整定PID 控制器設(shè)計(jì)The De ign of Neural Network Self_Tuning PlD Controller Ba ed on FPGA
摘要本文基于FPGA(現(xiàn)場可編程門陣列)技術(shù)實(shí)現(xiàn)了改進(jìn)的BP 網(wǎng)絡(luò)自整定PID
2009-01-12 16:50:3040 摘要:傳統(tǒng)的繼電振蕩PID 參數(shù)自整定方法由于在整定期間要使系統(tǒng)處于臨界振蕩狀態(tài),并且整定周期較長,限制了在許多工業(yè)控制過程中的應(yīng)用。介紹了一種基于開關(guān)階躍響應(yīng)算法的
2009-01-17 21:51:0934 PID控制器參數(shù)的優(yōu)化整定一直是自動(dòng)控制領(lǐng)域的研究熱點(diǎn)。提出一種利用改進(jìn)思維進(jìn)化計(jì)算(MEC)優(yōu)化PID控制器參數(shù)的方法,在原有算法的框架上,加入自調(diào)整操作,依據(jù)進(jìn)化方向
2009-03-15 02:39:5131 針對工業(yè)過程中再熱汽溫等一類大遲延慣性時(shí)變對象,采用模糊自整定PID 控制器對PID 參數(shù)調(diào)節(jié)和優(yōu)化,該方法將模糊技術(shù)與PID 控制綜合起來,實(shí)現(xiàn)了PID 控制的智能化。仿真
2009-06-11 09:20:3530 針對一般BP 算法存在的不足,提出一種改進(jìn)的BP 算法,并將其應(yīng)用于PID 控制器的參數(shù)設(shè)計(jì)中,并且克服了常規(guī)的PID 控制器參數(shù)整定的費(fèi)時(shí)性,用MBP 算法的PID 控制器代替常規(guī)的PID 調(diào)
2009-08-07 09:42:2318 積分過程在工業(yè)過程控制中經(jīng)常遇到,采用常規(guī)的PID 參數(shù)整定方法很難得到理想的控制效果。本文采用基于H∞回路成形的魯棒PID 參數(shù)整定方法,實(shí)現(xiàn)對積分過程的有效控制。通過Si
2009-08-07 09:51:168 自抗擾控制器在實(shí)際使用時(shí)有多個(gè)需要整定的參數(shù),由于控制器參數(shù)多,又無法確定參數(shù)作用方向,因此參數(shù)整定困難,為實(shí)際使用自抗擾控制器帶
2009-09-10 08:35:3527 本文根據(jù)傳統(tǒng)PID 控制技術(shù),結(jié)合模糊控制理論,設(shè)計(jì)出模糊PID 控制器,并用它完成對火災(zāi)實(shí)驗(yàn)爐溫度的控制。詳細(xì)分析了PID 參數(shù)整定原
2009-09-12 12:04:3415 基于免疫原理的控制器參數(shù)整定方法:基于免疫原理,建立了一個(gè)基于免疫機(jī)制進(jìn)行控制器參數(shù)整定的數(shù)學(xué)模型。給出了參數(shù)整定問題中抗原、抗體和親和力的定義,對基于免疫原理
2009-10-21 08:05:059 針對二自由度PID 控制器參數(shù)整定困難的問題,提出了一種基于單親遺傳算法的二自由度參數(shù)整定方法。運(yùn)用該算法分別對單自由度PID 控制器和二自由度控制器進(jìn)行了整定,并與
2009-12-26 13:56:4223 針對溫度控制中PID 算法系數(shù)較難整定的問題,將單片機(jī)采樣結(jié)果通過串行通訊傳送到PC 機(jī)并用LabVIEW 實(shí)時(shí)監(jiān)測,在此基礎(chǔ)上采用積分分離、微分滯后的PID 算法,以實(shí)現(xiàn)對溫度的高精
2010-01-18 14:57:0482 將神經(jīng)網(wǎng)絡(luò)應(yīng)用到PID控制器的參數(shù)整定過程中,提出了一種基于改進(jìn)單神經(jīng)元PID的航空發(fā)動(dòng)機(jī)解耦控制方法,通過在航空渦扇發(fā)動(dòng)機(jī)多變量控制系統(tǒng)中的應(yīng)用,得出了實(shí)際的仿真結(jié)果及
2010-02-11 15:00:3715 PID控制器 神經(jīng)網(wǎng)絡(luò)
2010-08-18 16:26:1035 PID控制5.1 PID控制概述5.2 PID控制算法5.3 PID控制器參數(shù)整定5.4 本章小結(jié)習(xí)題與思考
2010-08-23 11:47:5564 實(shí)驗(yàn) PID的參數(shù)整定及參數(shù)變化對系統(tǒng)的影響綜合實(shí)驗(yàn)
一、 實(shí)驗(yàn)?zāi)康模?、 掌握PID各校正環(huán)節(jié)的作用2、 確定給
2009-05-17 10:35:5529483 
基于CMAC神經(jīng)網(wǎng)絡(luò)的PID參數(shù)自整定方法的研究
0 引言
控制器的參數(shù)整定是通過對PID控制器參數(shù)(KP,KI,KD)的調(diào)整,使得系統(tǒng)的過渡過程達(dá)到滿意的質(zhì)量指標(biāo)
2009-12-01 17:39:063815 本文主要研究了一種手持式的PID參數(shù)整定儀器,此整定儀具有整定單變量和雙變量的雙重功能,控制系統(tǒng)主要采用低能耗的MSP430微控制器,軟件部分采用的軟件開發(fā)平臺(tái)是IAR MSP430 V3.42
2011-05-20 09:54:233576 
針對目前單回路PID控制系統(tǒng)穩(wěn)定性不高, 控制效果不理想的情況,提出以ARM7 S3C44B0X 32位嵌入式芯片為核心設(shè)計(jì)的單回路控制器的設(shè)計(jì)方法, 該芯片具有強(qiáng)大的數(shù)據(jù)處理功能。在設(shè)計(jì)過
2011-06-22 10:52:0650 針對一類不穩(wěn)定時(shí)滯過程,采用雙環(huán)控制結(jié)構(gòu),首先使廣義對象(內(nèi)環(huán))穩(wěn)定,然后用Taylor級(jí)數(shù)展開法,根據(jù)內(nèi)模控制原理設(shè)計(jì)外環(huán)控制器,得到等效的PID控制器參數(shù)的整定方法。仿真
2012-06-11 08:57:1636 針對傳統(tǒng)方法難以整定船載雷達(dá)伺服系統(tǒng)PID參數(shù)的問題,將模糊參數(shù)自整定PID控制技術(shù)應(yīng)用到伺服系統(tǒng)位置回路中,通過仿真實(shí)驗(yàn)表明該方法可以不依賴系統(tǒng)的數(shù)學(xué)模型,而根據(jù)輸入輸
2013-07-25 17:47:0328 該系統(tǒng)采用自校正控制原理和常規(guī)PID控制相結(jié)合的算法!能快速整定出PID控制器的參數(shù)
2013-09-23 17:17:1961 2014-10-16 14:41:230 PID參數(shù)整定方法的研究-2009,下來看看。
2016-03-31 17:01:4920 PID控制器參數(shù)整定方法及其應(yīng)用研究-2005。
2016-03-31 17:05:5620 PID控制器設(shè)計(jì)與參數(shù)整定方法綜述-2005
2016-03-31 17:46:3327 參數(shù)自整定PID控制器設(shè)計(jì)與仿真,下來看看
2016-03-31 17:46:3336 歸一化自整定PID控制器的擴(kuò)展設(shè)計(jì)與應(yīng)用
2016-03-31 17:46:338 基于MATLABSimuIink的PID參數(shù)整定-2009
2016-03-31 17:46:3313 基于MATLAB的模糊自整定PID參數(shù)控制器計(jì)算機(jī)仿真+(1)
2016-03-31 17:46:3321 基于參數(shù)自整定模糊PID控制策略的電機(jī)模型仿真研究-2004。
2016-04-05 11:14:2020 基于自整定模糊PID控制器的SRM調(diào)速系統(tǒng)。
2016-04-06 10:40:0214 永磁同步電機(jī)模糊PID參數(shù)自整定-2011。
2016-04-06 14:26:0423 以前寫論文收集的一些資料,學(xué)習(xí)PID控制的好資料!!!!
2016-06-06 09:42:113 PID教程之PID參數(shù)整定方法及其應(yīng)用研究
2016-09-01 15:01:520 基于MATLAB的PID控制器參數(shù)整定及仿真,感興趣的小伙伴們可以瞧一瞧。
2016-11-18 17:19:264 很好的資料
2016-12-16 20:32:440 SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定
2016-12-11 23:15:050 PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1544 自適應(yīng)粒子群優(yōu)化分?jǐn)?shù)階PID控制器的參數(shù)整定_陳超波
2017-01-03 15:24:4510 PID算法是工程控制領(lǐng)域常用的一種算法,其有著技術(shù)成熟,不需要建立數(shù)學(xué)模型,參數(shù)整定靈活,適用性強(qiáng),魯棒性強(qiáng),控制效果好等優(yōu)點(diǎn),得到了廣泛的應(yīng)用,其參數(shù)整定對控制效果影響極大,針對增量式的PID的參數(shù)整定方法在現(xiàn)有的文獻(xiàn)中較少涉及,本文將對增量式PID參數(shù)整定進(jìn)行一定的探討。
2017-11-24 16:27:2717031 
PID控制是最早發(fā)展起來的控制策略之一,因?yàn)樗婕暗脑O(shè)計(jì)算法和控制結(jié)構(gòu)都很簡單,因此,被廣泛應(yīng)用于過程控制和運(yùn)動(dòng)控制中。但在實(shí)際系統(tǒng)設(shè)計(jì)過程中,設(shè)計(jì)師經(jīng)常受到參數(shù)整定方法繁雜的困擾,PID控制器
2017-11-24 16:42:5039334 
為解決傳統(tǒng)工業(yè)控制中比例一積分一微分( PID)控制器參數(shù)整定的問題,提出了一種基于內(nèi)模法(IMC)以及系統(tǒng)辨識(shí)的控制器參數(shù)確定算法。該方法首先利用被控過程在開環(huán)階躍信號(hào)激勵(lì)下,輸入與暫態(tài)輸出的對應(yīng)
2018-01-03 10:35:281 PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來有兩大類
2018-02-26 14:19:1638022 PID是比例、積分、微分的簡稱,PID控制的難點(diǎn)不是編程,而是控制器的參數(shù)整定。參數(shù)整定的關(guān)鍵是正確地理解各參數(shù)的物理意義,PID控制的原理可以用人對爐溫的手動(dòng)控制來理解。閱讀本文不需要高深的數(shù)學(xué)知識(shí)。
2018-05-31 08:40:4447 本文首先介紹的是PID控制器的工作原理,其次介紹的是pid控制器的輸入輸出,最后介紹了PID控制器的參數(shù)整定以及PID控制器的控制實(shí)現(xiàn),具體的跟隨小編一起來了解一下。
2018-06-01 09:09:0131269 在工業(yè)過程控制中,PID控制適合于可建立數(shù)學(xué)模型的確定性控制系統(tǒng)。但在實(shí)際的工業(yè)過程控制系統(tǒng)中存在很多非線性或時(shí)變不確定的系統(tǒng),使PID控制器的參數(shù)整定煩瑣且控制效果也不理想。近年來,隨著智能控制技術(shù)的發(fā)展,出現(xiàn)了許多新型的控制方法,模糊控制就是其中之一。
2019-09-29 08:05:003634 
本文介紹了基于AVR單片機(jī)的自整定PID控制器的設(shè)計(jì).該控制器以FESTO水位為控制對象,控制核心為ATmega128單片機(jī).采用繼電自整定PID算法,并用LED數(shù)碼管實(shí)時(shí)顯示控制情況.實(shí)驗(yàn)結(jié)果表明,本設(shè)計(jì)可以根據(jù)實(shí)際情況在線自整定PID參數(shù).控制效果快速,平穩(wěn),超調(diào)量小。
2018-11-02 11:22:0026 PID控制是最早發(fā)展起來的控制策略之一,是迄今為止最通用的控制方法。目前大多數(shù)工業(yè)控制回路仍然應(yīng)用著PID控制器或改進(jìn)型PID控制器。在PID控制中,控制效果的好壞完全取決于PID參數(shù)的整定與優(yōu)化
2019-02-18 14:41:3620 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2019-07-18 16:10:3235115 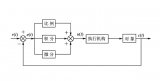
針對常規(guī)PID控制器參數(shù)整定不良、適應(yīng)性差、控制精度不理想的現(xiàn)狀,提出了動(dòng)態(tài)過程中參數(shù)自動(dòng)整定的模糊PID 控制系統(tǒng)。并利用MATLAB 的SUML IN K工具箱,對系統(tǒng)進(jìn)行仿真,仿真試驗(yàn)結(jié)果表明模糊PID 控制魯棒性好、控制精度提高。
2019-10-24 17:14:128 PID控制作為一種經(jīng)典的控制方法而廣泛應(yīng)用于工業(yè)控制中,是實(shí)際工業(yè)生產(chǎn)過程正常運(yùn)行的基本保障。隨著計(jì)算機(jī)技術(shù)的飛躍發(fā)展和人工智能技術(shù)滲透到自動(dòng)控制領(lǐng)域,出現(xiàn)了多種PID控制器的參數(shù)整定方法。本文
2019-12-04 08:00:0028 利用模糊控制規(guī)則在線對PID控制器進(jìn)行參數(shù)修整,便構(gòu)成參數(shù)模糊自整定PID控制器,其工作過程為:首先,將控制量的偏差e和偏差變化率ec作為二維模糊控制器的輸入變量,進(jìn)行模糊化處理;其次,對模糊化后
2020-05-03 10:40:005833 PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。
2020-06-18 09:41:0010042 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2020-08-31 09:34:526206 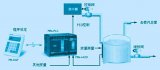
一是理論計(jì)算整定法。它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改。
2021-03-23 14:18:0443005 數(shù)字PID及其參數(shù)整定方法介紹。
2021-05-31 16:34:2227 可以得到各種輸出響應(yīng)特性,也就是說,通過適當(dāng)給定PID參數(shù),大多數(shù)的控制任務(wù)都可以由PID完成。本文根據(jù)經(jīng)典PID控制理論,結(jié)合玖陽自動(dòng)化科技公司的一線通模塊,詳細(xì)介紹PID參數(shù)在整個(gè)控制過程中所起的作用,指導(dǎo)PID控制中的參數(shù)整定。
2021-06-01 10:28:0170 PID參數(shù)整定資料免費(fèi)下載。
2021-06-01 10:36:1333 DCS控制系統(tǒng)PID參數(shù)的整定方法.(深圳市普德新星電源技術(shù)有限公司怎么樣)-該文檔為DCS控制系統(tǒng)PID參數(shù)的整定方法.講解資料,講解的還不錯(cuò),感興趣的可以下載看看…………………………
2021-08-04 15:40:1846 PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來有兩大類:
2022-05-26 16:34:3946583 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2022-09-27 15:27:226248
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論