。PID控制器作為最早實(shí)用化的控制器已有近百年歷史,現(xiàn)在仍然是應(yīng)用最廣泛的工業(yè)控制器。PID控制器簡單易懂,使用中不需精確的系統(tǒng)模型等先決條件,因而成為應(yīng)用最為廣泛的控制器。
2015-02-12 15:38:33 16999
16999 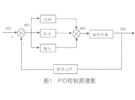
以串級調(diào)節(jié)系統(tǒng)為例來說明復(fù)雜調(diào)節(jié)系統(tǒng)的參數(shù)整定方法。由于串級調(diào)節(jié)系統(tǒng)中,有主、副兩組參數(shù),各通道及回路間存在著相互聯(lián)系和影響。改變主、副回路的任一參數(shù),對整個(gè)系統(tǒng)都有影響。特別是主、副對象時(shí)間常數(shù)相差不大時(shí),動態(tài)聯(lián)系密切,整定參數(shù)的工作尤其困難。
2023-09-21 09:43:2713180 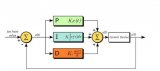
在工業(yè)自動化控制領(lǐng)域,PID自動控制回路的應(yīng)用非常廣泛。然而,在使用過程中,我們常常會遇到各種振蕩問題,如同相位振蕩、異相位振蕩和非平滑振蕩等。這些問題不僅會導(dǎo)致裝置的不穩(wěn)定,還可能影響整個(gè)生產(chǎn)過程的安全和效率。本文將分享這三種振蕩的特征及相應(yīng)的應(yīng)對方法,以供參考。
2023-12-28 09:10:2423548 
1. 引言 在本章中將重點(diǎn)介紹如何使用GForce-200 PLC CPU222進(jìn)行PID回路控制。2. PID控制概述 GForce-200系列PLC能夠進(jìn)行PID控制,其CPU最多可支持8個(gè)
2012-01-04 13:57:24
PID基礎(chǔ)知識文章目錄PID基礎(chǔ)知識PID簡介PID控制的原理和特點(diǎn)PID控制器的參數(shù)整定PID控制案例4.1 案例一4.2案例二P、PD、PI控制器5.1 P 比例控制5.2 PI 積分控制5.3
2021-07-01 10:01:17
PID控制原理及相應(yīng)的編程方法,有需要的可以下下載
2022-05-13 17:20:49
轉(zhuǎn)PID控制器(比例-積分-微分控制器)是一個(gè)在工業(yè)控制應(yīng)用中常見的反饋回路部件,由比例單元比例P(proportion)、積分單元I(integration)和微分單元D
2016-09-23 10:23:04
常用的控制算法有哪幾種?分別有何特點(diǎn)?PID控制算法的基本思想是什么?PID算法是如何形成的?
2021-12-21 07:05:49
常用的控制算法有哪幾種?PID控制算法的基本思想是什么?
2021-12-21 07:26:40
常用的控制算法有哪幾種?各自有什么特點(diǎn)?PID控制算法的基本思想是什么?PID控制算法是如何形成的?
2021-06-30 06:04:40
本帖最后由 張飛電子學(xué)院郭嘉 于 2021-3-11 17:37 編輯
PID控制詳解PID控制簡介PID( Proportional Integral Derivative)控制是最早
2021-01-25 17:19:51
PID溫度控制參數(shù)整定的方法是什么?
2021-11-22 06:13:41
PID詳細(xì)講解
2012-08-20 11:28:12
PID的原理是什么?常用的一些PID算法有哪些?
2022-01-21 06:48:09
常用的電路等效變換方法是什么?怎樣去計(jì)算回路電流呢?
2021-10-11 09:29:46
控制回路常用電氣元件原理介紹
2012-08-20 22:35:50
介紹一個(gè)簡單方法應(yīng)用于測量和優(yōu)化一個(gè)開關(guān)系統(tǒng)的控制回路,一個(gè)在真實(shí)環(huán)境中實(shí)施控制回路測量的直截了當(dāng)方法,還會介紹一個(gè)使用標(biāo)準(zhǔn)計(jì)算工具的優(yōu)化方法。
2018-08-27 14:02:17
筆記記錄了PID一步一步的原理第一張是非PID時(shí)的控制系統(tǒng)下面三張開始講解PID的原理了感覺挺簡單,應(yīng)該難在應(yīng)用吧,后面學(xué)到在繼續(xù)更新!
2022-01-14 06:14:44
發(fā)燒友學(xué)院提供,本次課程主要講解常用的控制算法與PID控制算法的異同點(diǎn);PID控制算法的理論分析;基于單片機(jī)的PID算法實(shí)現(xiàn);PID算法的工程應(yīng)用的一些注意事項(xiàng);演示板電路分析;PID算法C語言
2016-10-12 15:27:27
在進(jìn)行PID控制器工作之前,必須對其進(jìn)行調(diào)整以適應(yīng)要控制的過程的動態(tài)。設(shè)計(jì)者給出P,I和D項(xiàng)的默認(rèn)值,這些值不能給出期望的性能,有時(shí)會導(dǎo)致不穩(wěn)定性和緩慢的控制性能。開發(fā)了不同類型的調(diào)節(jié)方法來調(diào)節(jié)
2020-09-01 17:58:40
關(guān)于PID控制方法
2009-10-08 14:50:14
單片機(jī)的PID控制方法
2019-03-17 21:37:07
單片機(jī)的PID控制方法
2012-08-19 10:09:23
單片機(jī)的PID控制方法
2013-04-09 13:22:28
單片機(jī)的PID控制方法
2013-11-12 21:58:06
直流或者交流電源,電源和指示燈串在繼電器常開輸出電路中即可。那么這個(gè)再帶10v電源用于模擬量控制變頻器的頻率,一般是使用電位器調(diào)節(jié)輸出電壓調(diào)速用的。 每個(gè)品牌的變頻器的控制回路接線方法、要求的電壓
2020-12-07 15:56:14
常用四軸的兩種PID算法 這里主要講解的PID算法屬于一種線性控制器,這種控制器被廣泛應(yīng)用于四軸上。要控制四軸,顯而易見的是控制它的角度,那么最簡單,同時(shí)也是最容易想到的一種控制策略就是角度單環(huán)PID控制器,系統(tǒng)框圖如圖所示:
2019-05-30 10:08:56
圖文講解常用電子元器件
2021-06-07 06:17:56
本資料一共11節(jié)高清視頻,從經(jīng)典的位式控制理論到PID算法原理講解,最后結(jié)合STM32實(shí)現(xiàn)溫度控制全過程。本視頻配合全部源代碼和相關(guān)硬件資料。看完后能透徹理解PID算法原理,并在實(shí)際工作中能靈活
2016-08-30 10:54:06
我在搭建最簡單的PID控制回路的時(shí)候,PID子VI的輸出如何與傳遞函數(shù)子VI連接?這個(gè)仿真是只能在simulation loop里完成嗎?如圖所示。
2016-04-20 17:34:27
什么是PID控制?機(jī)器人設(shè)計(jì)中PID控制的編程方法是什么?
2021-06-30 06:53:20
標(biāo)準(zhǔn)的PID處理例程(PID通俗易懂的講解)[2]
2016-06-13 11:44:59
PID控制算法仿真與控制:了解計(jì)算機(jī)控制過程,及用不同種高級語言編寫實(shí)驗(yàn)程序的方法與特點(diǎn)。單回路溫度控制箱了解PID算法和程序設(shè)計(jì)。掌握階躍信號、自定義信號下,PID
2009-07-01 18:25:39 42
42 積分過程在工業(yè)過程控制中經(jīng)常遇到,采用常規(guī)的PID 參數(shù)整定方法很難得到理想的控制效果。本文采用基于H∞回路成形的魯棒PID 參數(shù)整定方法,實(shí)現(xiàn)對積分過程的有效控制。通過Si
2009-08-07 09:51:168 數(shù)字PID控制技術(shù)
數(shù)字PID控制在生活過程中是一種最普遍采用的控制方法,在機(jī)電、冶金、機(jī)械、化工等行業(yè)中獲得了廣泛的應(yīng)用。將偏差的比例(P)、積分(I
2010-04-28 14:09:5149 常用的PID控制系統(tǒng)技術(shù)及仿真
本章主要介紹了單回路PID控制系統(tǒng)、串級PID控制、純滯后系統(tǒng)的大林控制算法及其仿真結(jié)果。
2010-04-28 14:36:3852 幾種先進(jìn)PID控制方法
干擾觀測器的基本思想是將外部力矩干擾及模型參數(shù)變化造成的實(shí)際對象與名義模型輸出的差異等效到控制輸入端,即觀測出等效干擾。
2010-05-04 16:04:0161 本論建立了一個(gè)鍋爐動態(tài)水溫單回路控制系統(tǒng)。首先根據(jù)熱力學(xué)定理建立了鍋爐動態(tài)水溫模型;其次運(yùn)用MATLAB 對積分分離PID 控制算法和變速積分PID 控制算法進(jìn)行仿真。最后運(yùn)
2010-08-16 17:47:3872 基于控制回路補(bǔ)償參考電流的檢測方法,設(shè)計(jì)出了有源電力濾波器的主電路和控制電路。其中檢測部分采用了基于信號時(shí)域正交特性的參考指令電流優(yōu)化PWM檢測方法,并通過鎖相倍
2010-12-06 14:29:0625 基于FF現(xiàn)場總線的網(wǎng)絡(luò)化測控實(shí)驗(yàn)平臺上,設(shè)計(jì)了雙容水箱的液位反饋控制回路,實(shí)現(xiàn)了基于OPC技術(shù)的PID控制算法。
2011-02-11 11:58:498078 
本書所屬的大部分內(nèi)容都是關(guān)于單回路PID控制系統(tǒng)的 串級控制的主要優(yōu)點(diǎn) 1 將干擾加到副回路中,由副回路控制對其進(jìn)行抑制 2副回路中參數(shù)的變化,由副回路給予控制,對被控量的影響大為減弱
2011-03-04 15:52:58138 本文詳細(xì)給出了PID的應(yīng)用講解,希望對你學(xué)習(xí)有所幫助!
2011-05-27 17:25:24418 針對目前單回路PID控制系統(tǒng)穩(wěn)定性不高, 控制效果不理想的情況,提出以ARM7 S3C44B0X 32位嵌入式芯片為核心設(shè)計(jì)的單回路控制器的設(shè)計(jì)方法, 該芯片具有強(qiáng)大的數(shù)據(jù)處理功能。在設(shè)計(jì)過
2011-06-22 10:52:0650 本文提出了一種基于OPC的數(shù)據(jù)采集技術(shù)和NLJ隨機(jī)搜索算法,應(yīng)用內(nèi)模控制原理,對催化裂化 PID 控制回路進(jìn)行參數(shù)優(yōu)化,旨在針對催化裂化裝置先進(jìn)控制難于長期投運(yùn)的缺點(diǎn),該方法操作簡
2011-07-18 16:17:5313 PID控制器是一種最優(yōu)控制。本文講述了增量式PID算法原理與數(shù)字PID算法原理與數(shù)字PID算法程序,詳細(xì)講解了什么是pid算法。
2012-01-01 11:58:2111919 
數(shù)字PID控制算法是將模擬PID離散化得到,各參數(shù)有著明顯的物理意義,調(diào)整方便,所以PID控制器很受工程技術(shù)人員的喜愛。
2012-01-16 16:27:45903 S7-200 能夠進(jìn)行 PID 控制。S7-200 CPU 最多可以支持 8 個(gè) PID 控制回路(8 個(gè) PID 指令功能塊)。 PID 是閉環(huán)控制系統(tǒng)的比例-積分-微分控制算法。 PID 控制器根據(jù)設(shè)定值(給定)與被控對象
2013-09-17 15:13:15104 PID控制器及其智能化方法探討-1999
2016-03-31 17:46:3313 PID控制器設(shè)計(jì)與參數(shù)整定方法綜述-2005
2016-03-31 17:46:3327 智能PID控制方法綜述-2005,下來看看。
2016-04-01 14:59:4323 滿意PID控制設(shè)計(jì)理論與方法-2007-1-科學(xué)出版社-馬建偉。
2016-04-01 15:13:310 應(yīng)用于直線電機(jī)的平滑切換模糊PID控制方法-2006。
2016-04-06 14:23:4012 主要講解pid的控制,特別是模糊控制。
2016-04-13 15:13:3425 很好的模糊算法資料,有例程分析。講解基本的模糊概念,與線性控制PID算法結(jié)合在一塊。
2016-06-24 15:51:2912 本文檔詳細(xì)介紹了PID算法,以及單片機(jī)的PID控制方法
2016-08-30 17:02:3516 PID控制原理及編程方法
2016-11-17 11:43:166 PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1544 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 一類基于PID控制的新型模糊控制方法_張恩勤
2017-02-07 18:37:160 基于模糊理論與常規(guī)PID控制的模糊PID控制方法研究_趙笑笑
2017-01-31 15:22:4410 比較體系的PID控制算法C語言講解
2017-09-20 11:41:2113 基于PID控制原理及編程方法
2017-10-15 09:32:4122 PID控制器(比例-積分-微分控制器)是一個(gè)在工業(yè)控制應(yīng)用中常見的反饋回路部件,由比例單元比例P(proportion)、積分單元I(integration)和微分單元D
2017-11-15 11:36:5772 PID調(diào)節(jié)器的適用范圍:PID調(diào)節(jié)控制是一個(gè)傳統(tǒng)控制方法,它適用于溫度、壓力、流量、液位等幾乎所有現(xiàn)場,不同的現(xiàn)場,僅僅是PID參數(shù)應(yīng)設(shè)置不同,只要參數(shù)設(shè)置得當(dāng)均可以達(dá)到很好的效果。均可以達(dá)到0.1%,甚至更高的控制要求。
2018-07-20 08:08:00136748 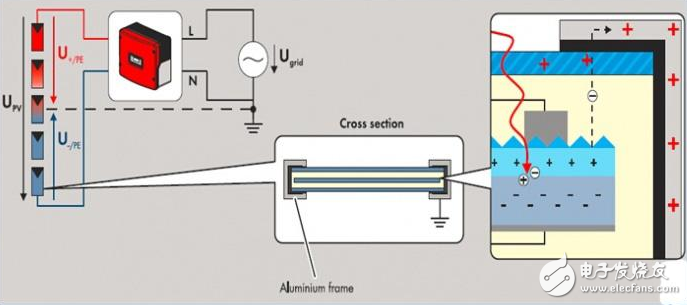
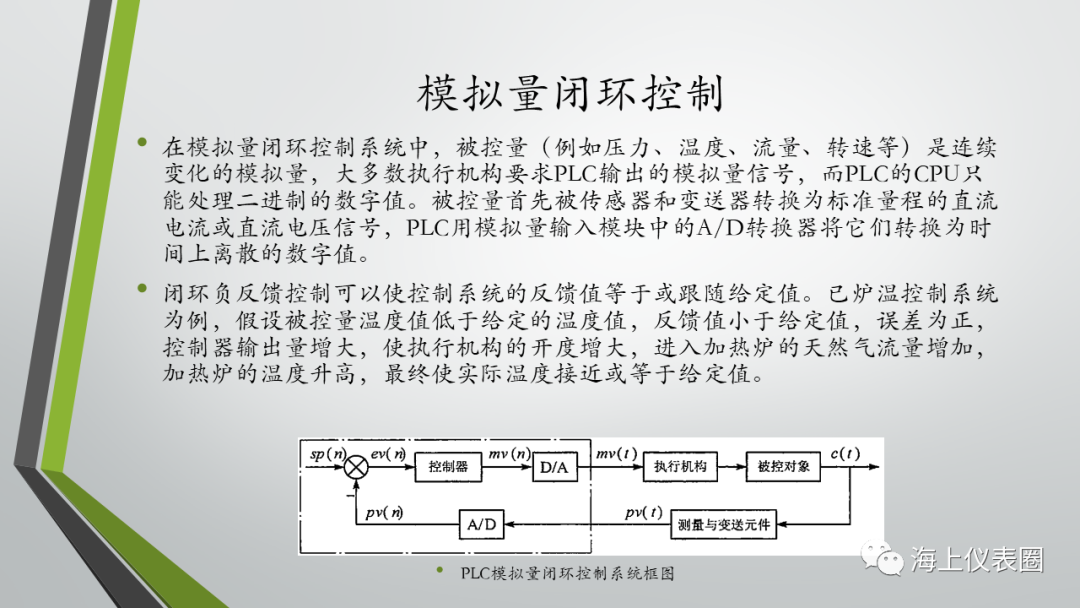
GForce-200系列PLC能夠進(jìn)行PID控制,其CPU最多可支持8個(gè)PID控制回路。PID是閉環(huán)控制系統(tǒng)中比例-積分-微分控制算法,它可以看作是這三項(xiàng)之和,根據(jù)設(shè)定值與被控對象實(shí)際值的差值,按PID方式計(jì)算出控制輸出量,使反饋跟隨設(shè)定值變化,因此PID控制是負(fù)反饋閉環(huán)控制。
2018-02-06 18:11:392739 
普通PID控制作為一種線性控制方法,在一些環(huán)境條件變化的影響之下無法保持設(shè)計(jì)時(shí)的性能指標(biāo)。機(jī)械臂關(guān)節(jié)用無刷直流電機(jī)要求控制精度高,但由于其非線性的特點(diǎn),普通PID控制難以做到精確控制。
2018-05-31 15:00:0010 pid算法講解
2018-06-10 08:00:000 pid算法講解
2018-06-10 08:00:000 穩(wěn)定的PID是指過程變量接近設(shè)定值,輸出不會不規(guī)則的變化,且回路的輸出值在控制范圍中心附近變化。
2018-08-23 15:15:305836 PID控制是最早發(fā)展起來的控制策略之一,是迄今為止最通用的控制方法。目前大多數(shù)工業(yè)控制回路仍然應(yīng)用著PID控制器或改進(jìn)型PID控制器。在PID控制中,控制效果的好壞完全取決于PID參數(shù)的整定與優(yōu)化
2019-02-18 14:41:3620 在工業(yè)自動化行業(yè),盡管大部分人將比例-積分-微分 (PID) 算法作為閉環(huán)過程控制的事實(shí)標(biāo)準(zhǔn),但優(yōu)化PID回路以達(dá)到最優(yōu)性能的最佳方法,仍然沒有達(dá)成共識。這些實(shí)踐在概念上很簡單:選擇用于定義總體控制
2019-04-05 06:08:004317 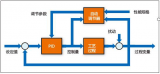
電氣二次原理接線圖是用來表示二次接線各元件(儀表、繼電器、信號裝置、自動裝置及控制開關(guān)等設(shè)備)的電氣聯(lián)系及工作原理的電氣回路圖。首先,在講解電氣二次控制回路前,我們來先認(rèn)識一些低壓元器件。
2019-06-22 10:02:5110781 
PID控制應(yīng)該算是應(yīng)用非常廣泛的控制算法了。
2019-08-12 08:39:1210444 
和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過MATLAB仿真程序進(jìn)行了說明,所有仿真程序均存
2019-09-19 17:48:19173 和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過MATLAB仿真程序進(jìn)行了說明,所有仿真程序均存
2019-11-13 16:24:2374 和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過MATLAB仿真程序進(jìn)行了說明,所有仿真程序均存
2019-11-21 15:26:54100 PID控制作為一種經(jīng)典的控制方法而廣泛應(yīng)用于工業(yè)控制中,是實(shí)際工業(yè)生產(chǎn)過程正常運(yùn)行的基本保障。隨著計(jì)算機(jī)技術(shù)的飛躍發(fā)展和人工智能技術(shù)滲透到自動控制領(lǐng)域,出現(xiàn)了多種PID控制器的參數(shù)整定方法。本文
2019-12-04 08:00:0028 本書從 MATLAB 仿真角度系統(tǒng)地介紹了 PID 控制的基本理論、基本方法和應(yīng)用技術(shù),是作者多年來從事控制系統(tǒng)教學(xué)和科研工作的結(jié)晶,同時(shí)融入了國內(nèi)外同行近年來所取得的新成果。 全書共分十章,包括
2020-05-22 08:00:0022 電子發(fā)燒友網(wǎng)為你提供PID控制算法常用歸納資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設(shè)計(jì)、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-29 08:47:2211 PID調(diào)節(jié)方法講解免費(fèi)下載。
2021-05-25 16:01:1864 數(shù)字PID及其算法講解說明。
2021-06-17 16:42:5924 基于模糊PID控制器的VRV空調(diào)系統(tǒng)設(shè)計(jì)方法
2021-07-01 16:08:323 基于PID控制的直流電機(jī)調(diào)速系統(tǒng)(電源變壓器線圈壞了)-該文檔為基于PID控制的直流電機(jī)調(diào)速系統(tǒng)講解資料,講解的還不錯(cuò),感興趣的可以下載看看…………………………
2021-07-26 10:50:0933 直流電機(jī)PID控制(固緯3030電源)-該文檔為 直流電機(jī)PID控制資料,講解的還不錯(cuò),感興趣的可以下載看看…………………………
2021-07-26 11:55:0551 直流調(diào)速系統(tǒng)的PID控制與仿真(深圳中遠(yuǎn)通電源技術(shù)有限公司怎么樣)-該文檔為直流調(diào)速系統(tǒng)的PID控制與仿真講解資料,講解的還不錯(cuò),感興趣的可以下載看看…………………………
2021-08-04 15:38:3520 DCS控制系統(tǒng)PID參數(shù)的整定方法.(深圳市普德新星電源技術(shù)有限公司怎么樣)-該文檔為DCS控制系統(tǒng)PID參數(shù)的整定方法.講解資料,講解的還不錯(cuò),感興趣的可以下載看看…………………………
2021-08-04 15:40:1846 四軸PID講解資料匯總
2021-09-22 09:34:222 PID控制PWM調(diào)節(jié)直流電機(jī)速度設(shè)計(jì)講解(軍用通信電源技術(shù)有哪些)-該文檔為PID控制PWM調(diào)節(jié)直流電機(jī)速度設(shè)計(jì)講解文檔,是一份還算不錯(cuò)的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,
2021-09-28 12:30:3754 在控制電機(jī)中,PID控制器通常用來控制電機(jī)的轉(zhuǎn)速或者位置。具體來說,PID控制器的輸入是電機(jī)的誤差信號,即期望值與實(shí)際值之間的差值,輸出是電機(jī)的控制信號,例如電壓或者電流。PID控制器通過對誤差信號進(jìn)行比例、積分和微分處理,來實(shí)現(xiàn)對電機(jī)控制信號的調(diào)節(jié)。
2023-03-12 10:39:094736 PID控制器是應(yīng)用最廣泛的閉環(huán)控制器,它根據(jù)給定值與被控實(shí)測值之間的偏差;按照PID算法計(jì)算出控制器的輸出量,控制執(zhí)行機(jī)構(gòu)進(jìn)行調(diào)節(jié),使被控量跟隨給定量變化,并使系統(tǒng)達(dá)到穩(wěn)定。
2023-05-17 13:03:069242 
PID溫控系統(tǒng)是一種常用的控制系統(tǒng),用于實(shí)現(xiàn)對溫度變量的精確控制。PID算法根據(jù)當(dāng)前的溫度誤差以及誤差的變化率,計(jì)算一個(gè)控制信號,用于調(diào)節(jié)加熱器的輸出。
2023-08-14 18:21:573736 
在實(shí)際工程中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。
2023-12-31 14:39:003013 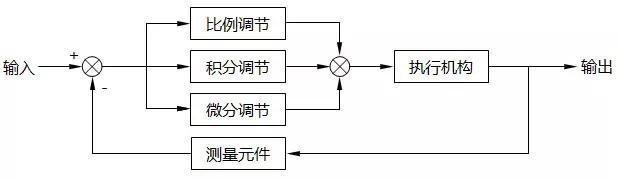
PID效應(yīng)的成因及抑制方法 PID(比例積分微分)控制器是一種常用的自動控制器,廣泛應(yīng)用于工業(yè)控制系統(tǒng)中。它由比例(P)、積分(I)和微分(D)三部分組成,用于控制系統(tǒng)的輸出校正與調(diào)節(jié)。 PID效應(yīng)
2024-01-23 14:58:283579 串級控制系統(tǒng)副回路不常選用PID控制的原因,主要基于以下幾個(gè)方面: 1. 控制要求差異 串級控制系統(tǒng)的主要目的是為了高精度地穩(wěn)定主變量,對主變量的控制要求極高,一般不允許有余差。因此,主控制器通常
2024-08-23 09:11:221905 在現(xiàn)代工業(yè)自動化控制系統(tǒng)中,PID控制器因其簡單、高效而被廣泛使用。PID控制器的三個(gè)參數(shù)——比例(P)、積分(I)和微分(D)——共同決定了系統(tǒng)的動態(tài)響應(yīng)和穩(wěn)定性。 PID控制器原理簡述 PID
2024-11-13 14:31:3313840
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論