發(fā)電機無功補償是電力系統(tǒng)中的重要環(huán)節(jié),它起到優(yōu)化電力系統(tǒng)的功率因數(shù),提高電能質(zhì)量的作用。然而,如果發(fā)電機無功補償過高,就會帶來一系列的危害和問題。發(fā)電機無功補償過高的危害有很多,比如下面這些點。
2023-08-10 15:35:18 6791
6791 
最大的補償值+1.1.07,補償才最接近標準表的值但是功率因數(shù)還是有誤差;但是通過以下的實測波形只有IC J8-2是電流超前,如果按照此波形進行補償的話更是超出了范圍。不知道是哪里不對?功率因數(shù)不準
2018-09-18 11:18:46
1、這個傳感器輸出來的數(shù)據(jù)是經(jīng)過誤差補償的嗎?還是需要使用者自己去寄存器中讀取數(shù)據(jù)進行補償?
2、傳感器的標定中的安裝誤差和與比例有關項的系數(shù)是不是需要使用者自己去測?
2024-01-02 08:01:36
使用FOC算法有位置傳感器控制永磁同步電機時,程序中有一個參數(shù)是補償角度。我想問的是這個角度如果設置的和實際補償角度不一樣會有什么后果?會影響電機轉動嗎?
2018-09-21 14:14:40
Rs估算是通過向d軸注入直流電流來實現(xiàn)的,這個時候如果注入的電流在定子形成的磁場和轉子磁場不在同一方向上,轉子應該就會轉動吧,為什么技術指南上說Rs離線校準要求電機靜止,請問如何才能保證電機靜止呢?
2018-09-25 10:53:13
請問大家, 最近在用28069F測無位置控制算法的性能,使用的是一臺小功率永磁同步電機,發(fā)現(xiàn)給定轉速與估算器輸出轉速基本一致,但與實際轉速相差較大,不知道是哪里的參數(shù)有問題導致的。自己感覺可能
2018-12-19 11:24:42
想請教技術達人一個問題,就是OPA228的數(shù)據(jù)手冊上有寫這款芯片要加補償電容,請問這個電容值怎么估算呢?
2024-09-20 06:12:38
PMSM電機帶編碼器時,常規(guī)的方法是相電流經(jīng)過PARK,CLARK變換后,進行ArcTan算出電流方向再進行補償,是否可以直接用編碼器反饋的位置信息進行補償呢?
2024-04-08 07:53:42
的工作原理AMR傳感器的選擇為了確保電機轉動的高精準度,在選擇角度傳感器時有以下建議 :能感應360° 旋轉角,可以準確測量絕對角度位置(Absolute Angular Position);角度誤差率較低
2019-08-10 08:00:00
關于永磁同步電機的一個問題,假如電機為4極對,那么編碼器給出的UVW相信號一個360電角度對應的機械角度為90度。每一種UVW相信號對應60電角度即15度機械角度。想不明白的就是電機可能停在15度角里的任意位置,那怎么由UVW相信號來計算出啟動時的電角度是多少呢?是我的思路不對還是怎樣!
2020-03-30 16:44:23
各位前輩,大家好!目前是使用MAXON電機進行特定角度曲線的跟蹤控制,具體如下:1目標角度曲線原周期是1秒,曲線現(xiàn)狀類似于正弦波形,但更復雜些。2 電機驅(qū)動器設置在電流控制模式,就是通過調(diào)節(jié)電流大小
2020-01-25 20:27:15
壓阻式傳感器為什么會產(chǎn)生溫度誤差?如何補償?
2021-06-18 08:01:57
壓阻式傳感器有哪些典型特點?壓阻式傳感器為什么會產(chǎn)生溫度誤差?如何補償?
2021-06-08 08:28:22
所示。在表1中未補償前的最大誤差角度為0.682 7°,表3中補償后的最大誤差角度為0.261 6°,相對減少的誤差角度為0.421 1°。 由表1和表3的數(shù)據(jù)對比結果可以看出,經(jīng)過溫度補償后的姿態(tài)
2018-11-06 15:51:47
的輸出值。償后的數(shù)據(jù)如表3所示。在表1中未補償前的最大誤差角度為0.682 7°,表3中補償后的最大誤差角度為0.261 6°,相對減少的誤差角度為0.421 1°。 5 結語 由表1和表3
2018-11-06 15:28:58
不下去。解決工程師項目痛點。
直播回放: https://t.elecfans.com/live/2342.html
課件資料:*附件:基于電流誤差和PLL估算的無感FOC算法MATLAB代碼生成技術直播資料分享.rar
2023-06-14 11:36:04
如何實現(xiàn)伺服電機轉動固定角度呢?然后又停下來?
2021-09-24 06:37:51
我在我的電源板項目中使用轉換器 Viper06。我在設計誤差放大器的補償網(wǎng)絡時遇到了一些困難。有人可以告訴我如何做到這一點或分享一些解釋如何設計補償網(wǎng)絡的文件。我用在線工具得到了一些值,但我想了解這些值是怎么出來的!
2023-02-08 08:08:22
如何選擇伺服電機?有沒有相關快捷或者估算電機的方法?
2023-12-12 06:23:09
和節(jié)能應用中受到普遍關心的產(chǎn)品和開發(fā)課題。無速度傳感器磁場定向矢量控制技術的核心是如何準確的獲取磁場定向角以及電機的轉速信息。 無速度傳感器控制方式分為4類: 1、定子電流轉矩分量誤差補償法; 2
2016-01-21 15:40:59
用MSP430F149怎么進行PWM的脈沖計數(shù)啊,控制步進電機的角度??請教下,謝謝。。。
2015-12-31 14:12:12
菜鳥剛玩電機,不怎么懂/在玩無刷電機的時候,無刷電機為什么在換相會直接轉動5度大小的角度?怎么樣才能玩轉360度的控制呢?
2016-01-12 09:35:28
電機的運動原理是什么?怎樣去搭建一種電機模型?電角度和機械角度有什么關系?
2021-07-20 06:58:05
* dt + estimator.accZ * dt * dt / 2.0f;是估算加速度偏小造成的,所以補償加速度應該讓估算的加速度值變大一點,而補償加速度的公式為estimator.accZ
2019-07-26 04:35:55
做了個電流表滿量程300準確,但50時誤差為20,想對300到50之間加一個補償,實際300時補償0,實際50時補償20。按300到50之間的誤差是線性的,具體公式怎么寫,用的匯編只能算整數(shù)。
2018-05-31 17:31:00
有沒有測試電機角度的demo硬件呢?要怎么做,用位置傳感器嗎,哪里有賣?
2018-12-12 11:09:07
角度PID里的積分項,應該就是從上一次平衡后的誤差角度累加乘上采樣時間得到的。但是微分項說角度的微分是角速度,角速度的積分是角度,所以直接利用陀螺儀的角速度。但是我發(fā)現(xiàn)那句話:角速度的積分就是角度,所以能不能在角度積分項中直接用歐拉角的角度值呢?
2019-04-17 06:36:22
請問A/D轉換器MAX1324最常見的誤差源有哪些?怎么大幅度提高系統(tǒng)整體性能,有哪些誤差補償的方法?
2021-04-08 06:39:26
1、這個傳感器輸出來的數(shù)據(jù)是經(jīng)過誤差補償的嗎?還是需要使用者自己去寄存器中讀取數(shù)據(jù)進行補償?2、傳感器的標定中的安裝誤差和與比例有關項的系數(shù)是不是需要使用者自己去測?
2018-11-26 09:26:41
請問一下電機控制5段式PWM如何做死區(qū)補償呢?
2023-04-18 17:25:39
請問怎樣去計算步進電機一個脈沖轉了多少角度呢?如果和細分有關細,那么細分又是如何來算的呢,多謝!
2023-03-03 16:06:50
1.根據(jù)實時扭矩請求,控制電流達到需求扭矩(扭矩控制必須準確,誤差在±10%之內(nèi)才行),用FOC算法(電機僅帶霍爾傳感)可行么? 2. 最終目的是控制物體平衡性的(轉子角度在低速時,估算不準確,轉動異常,怎么解決?)
2018-09-19 09:42:22
`,這是我對比的估算角度和實測角度。`
2019-06-09 16:58:40
采用滑膜估算的角度和實際的角度總是有相位差,但是觀察由滑膜估算的電流和實際的電流,它們的波形基本重合。為什么?下圖為估算的電流和實際的電流波形圖。和估算的角度和實際的角度的圖形。其中黃色的代表估算的角度,綠色的代表實際的角度。謝謝指導。
2018-12-14 13:51:08
在測量系統(tǒng)中,傳感器的非線性特性是測量系統(tǒng)誤差的主要來源。要提高測量系統(tǒng)的精度,就必須進行誤差補償。設計了一個用模糊小腦神經(jīng)網(wǎng)絡實現(xiàn)的補償環(huán)節(jié)。該補償環(huán)節(jié)是一
2009-03-14 18:27:01 11
11 本文介紹了數(shù)控機床的螺距誤差補償原理和基于激光干涉儀的螺距誤差測量系統(tǒng),并且討論了在螺距誤差測量中所出現(xiàn)的問題和解決方案,最后介紹了螺距誤差補償的適用范圍。
2009-05-05 22:01:0574 本文分析了單片機定時器溢出中斷與CPU響應中斷的時間誤差,并給出了補償誤差的方法和實例。關鍵詞:單片機; 定時器; 中斷; 誤差
2009-05-31 14:31:2226 研究了一種智能電子羅盤的誤差補償問題。把誤差的形成過程假設為從圓到橢圓的變化過程(橢圓假設) ,其逆過程就是誤差補償的過程。研究了基于橢圓假設求解誤差系數(shù)算法和誤差
2009-06-22 11:55:3241 介紹了壓力傳感器、變送器、智能壓力傳感器,對壓力傳感器的零點漂移、壓力靈敏度、非線性誤差進行補償。設計了壓力變送器、溫度變送器、A/D 轉換器和單片機電路。較好地補
2009-06-25 11:04:20110 研制了一種具有三種誤差補償方法的智能磁航向系統(tǒng)(智能電子磁羅盤) 。傳統(tǒng)的給定基準法具有滿意的補償效果,但試驗復雜。對水平情況,橢圓假設法把誤差的形成過程假設為從圓到
2009-07-01 09:51:078 基于Web的數(shù)控曲面磨床幾何誤差補償技術:以誤差補償技術的網(wǎng)絡化應用為目的展開研究,選取SMART-CNC 數(shù)控曲面磨床為研究對象,運用多體理論,建立了磨床的運動模型,獲得了
2009-10-12 18:36:2626 本文由MIMO 無線通信信道容量的表達式,給出一種估算式。通過數(shù)值仿真對估算值與精確值進行比較,進行誤差分析,得出估算值是較精確的,可用估算表達式可靠地預測MIMO 信道的
2010-02-06 10:37:2720
傳感器非線性誤差的補償電路
2009-04-26 15:59:211343 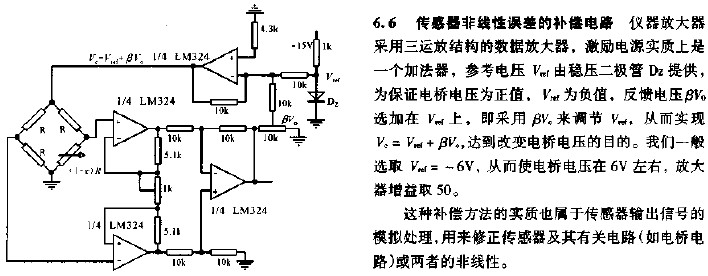
估算單向電機啟動電容單向電動機啟動電容器,經(jīng)長時間使用后,容易出現(xiàn)容量減少的故障。若想確知容量大小,可將它與交流電流表串聯(lián)后,接于市電220V
2009-08-14 15:36:301365 指出了超聲波在測距應用中的局限性, 并給出解決方案。著重從新的角度補償超聲傳感器的誤差, 提出了用BP前饋神經(jīng)網(wǎng)絡補償超聲波聲速受溫度、濕度變化而引起的誤差。
2012-04-01 15:18:229 電子發(fā)燒友網(wǎng)站提供《圓光柵角度傳感器的誤差補償及參數(shù)辨識資料下載.pdf》資料免費下載
2017-03-26 22:14:001 本文針對半閉環(huán)伺服壓裝系統(tǒng)的誤差特點,設計使用剛性塊作為輔助裝置進行誤差標定,并通過最小二乘法擬合和誤差表格插值,實現(xiàn)誤差的補償。經(jīng)過對隨機選取的實際生產(chǎn)數(shù)據(jù)進行誤差補償并與數(shù)顯千分表實測值進行對比分析后得,補償后的誤差可以控制在1%左右,極大地提高了零部件壓裝合格判定的準確度。
2015-12-24 16:05:2512 FANUC-18iMB數(shù)控系統(tǒng)螺距誤差補償說明,附參數(shù)說明。
2016-02-18 17:22:474 永磁同步電機用線性霍爾位置檢測的誤差補償_劉剛
2017-01-07 15:26:082 MEMS加速度計的溫度誤差建模及補償_秦麗
2017-01-12 18:09:582 雙頻GPS信號仿真的電離層誤差補償模型研究_謝杰
2017-03-14 08:00:001 基于ARM的同步交流采樣和誤差補償_潘健
2017-03-19 11:47:146 基于PSO_SVM的四旋翼航向角誤差補償研究_王鵬彰
2017-03-19 11:41:233 超聲波流量測量的誤差分析與補償方法研究_葛輝
2017-03-19 19:03:122 改進的IMU傳感器安裝誤差正交補償方法_馬亞平
2017-03-19 19:04:237 硅微加速度計溫度特性分析與誤差補償_王增躍
2017-03-19 19:07:042 基于九軸MEMS定位系統(tǒng)誤差分析與補償算法研究_張港
2017-03-19 19:28:034 估算出輪廓誤差值,結合雙模糊變論域自適應控制算法,應用于兩軸數(shù)控系統(tǒng)并實時補償各單軸控制器,實現(xiàn)對復雜加工過程輪廓誤差實時估算并補償。在實驗數(shù)控機床上加工兩種典型輪廓,對比實驗表明,所提出的基于輪廓最優(yōu)圓
2017-11-29 10:30:010 分析了圓筒型永磁直線同步電機采用線性霍爾傳感器進行位置檢測時存在的誤差,并提出了一種離線標定和在線Kalman濾波相結合的誤差補償方法。霍爾傳感器信號的誤差形式包括存在直流偏置、兩路信號幅值不相等
2018-03-07 10:29:470 的優(yōu)點,由同一電機帶動光電編碼器和被測旋轉變壓器,以FPGA +ARM組成的控制模塊讀出光電編碼器和被測旋轉變壓器的角度,并進行比較分析,測量旋轉變壓器的非線性誤差,建立誤差分析表,提出了一種根據(jù)系數(shù)進行補償的方式,對旋轉變壓器的
2018-03-14 10:59:039 變壓器和編碼器等方式。通過解算電機角度、轉速信息,實現(xiàn)閉環(huán)矢量控制。但傳感器的引入會增加系統(tǒng)成本、降低系統(tǒng)可靠性及增加電機尺寸,并且有些場合受溫度、濕度和電機尺寸限制等,位置傳感器無法使用。為了解決此問題,需要研究無速度傳感
2018-03-20 10:25:3128 為減小電流測量誤差,滿足永磁同步電機高性能調(diào)速要求,對相電流測量誤差進行了分析與補償。首先,介紹了電流測量誤差產(chǎn)生原理,分析了測量誤差對閉環(huán)調(diào)速系統(tǒng)性能的影響。然后,提出了一種對d軸電流進行分段積分
2018-03-20 18:24:001 位姿精度是研究機器人的關鍵性能指標。國內(nèi)外學者一直關注并不斷研究發(fā)現(xiàn)多種多樣的誤差補償方法如硬件補償法、攝動補償算法和直接修正算法對機器人的位姿誤差進行補償。陳明哲與張啟先采用雅可比矩陣構建
2018-04-20 16:56:531 LE誤差放大器及其相關的補償網(wǎng)絡使動物回到控制輸入端,補償網(wǎng)絡%。
2018-05-29 09:48:0896 (SIN)和余弦(COS)波形的差分信號。CT300的差分信號經(jīng)過處理和補償,在-40℃ ~ +150℃的溫度范圍內(nèi),所產(chǎn)生的角度誤差將等于或低于0.5°。
2018-11-16 15:13:173063 采用直流力矩電機分度,同步采集系統(tǒng)進行數(shù)據(jù)采集,對高精度兩路關聯(lián)角度傳感器自動標定。為了實現(xiàn)秒級角度的自動標定,采用了閉環(huán)控制系統(tǒng)和角度誤差補償,在± 3o范圍內(nèi),控制精度可達到0 。 2“。利用虛擬儀器技術整合數(shù)據(jù)采集和控制系統(tǒng),使得標定高效方便。
2019-11-05 17:22:1515 針對多探頭球面近場天線測試系統(tǒng)的通道不一致性提出了校準方法,并對對準角度誤差引入的近場測量幅度相位誤差進行了仿真分析。分析表明,當對準角度誤差 Δφ = 0. 5°時,引入的近場測量幅度誤差
2020-01-06 08:00:0020 在使用ST FOC電機庫時,當使用Hall信號作為位置信號時,需要輸入同步電角度數(shù)據(jù),這個數(shù)據(jù)根據(jù)當前使用電機的特性進行輸入,會在每次Hall信號變化時同步電角度,如果角度偏差較大時會影響控制效果,可能帶來效率或者電機的震蕩,初始測試還是有必要的,本文詳細說明測試注意事項以及測試方法。
2021-03-12 15:47:0022 壓力傳感器信號調(diào)節(jié)電路設計及誤差補償技術。
2021-03-19 15:29:5628 電纜壓降補償器無需檢測線即可校正遠端負載調(diào)節(jié)誤差
2021-03-20 18:50:417 Cortex?-M0 + MCU中,ADC 增益和失調(diào)誤差可通過硬件進行補償,從而降低了補償這些 ADC 誤差的應用開銷。
2021-04-01 10:14:4342 誤差補償技術分為硬件補償和軟件補償。其中,硬件補償主要是通過機床的機械結構進行調(diào)整,減少機械上的誤差,如制作校正尺補償螺距誤差、制作凸輪校正傳動鏈誤差等。硬件補償不適用于隨機誤差且缺乏柔性。軟件補償是指通過計算機對所建立的數(shù)學模型進行運算后,發(fā)出運動補償指令,由數(shù)控伺服系統(tǒng)完成誤差補償動作。
2023-02-08 11:42:448442 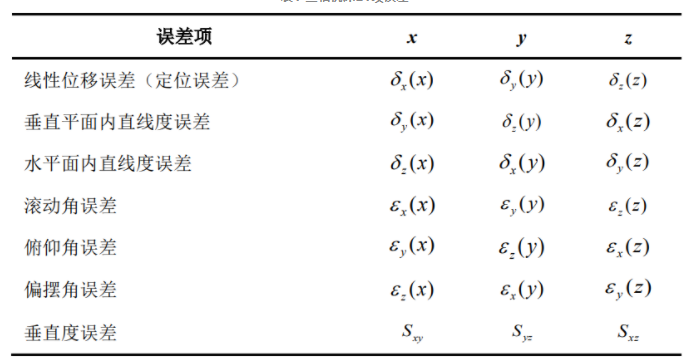
數(shù)控機床的傳動機構一般是滾珠絲桿副,滾珠絲桿副在生產(chǎn)制造和裝配過程中都存在一定誤差,且長期使用造成的磨損等因素都會使其精度下降,當前有效且廣泛應用的方法是利用激光干涉儀對數(shù)控機床進行螺距誤差補償
2022-03-21 11:32:364052 
,需要對機床進行幾何誤差補償。有研究表明,數(shù)控機床在溫度變化影響不大的情況下幾何誤差較為穩(wěn)定,因此,提高機床精度可采取誤差補償的方式。對于誤差的產(chǎn)生、檢測和補償國內(nèi)
2022-03-04 17:47:232161 
步進電機驅(qū)動電壓、角度、代碼舉例
2023-09-18 11:28:266792 電路設計中偏置電流是如何引起誤差的呢? 在電路設計中,偏置電流是一種非常重要的參考電流,它被用來控制電路的工作狀態(tài)。然而,偏置電流也會引起誤差,這些誤差可能會對電路的性能和精度產(chǎn)生不利影響。 偏置
2023-10-30 09:12:081455 功率補償的作用?如何進行功率補償的切換呢? 一、功率補償的作用 當負載變化引起發(fā)電機的電壓和頻率的波動時,功率補償就是為了保證電網(wǎng)的穩(wěn)定運行。功率補償的主要作用是通過電容器等電氣裝置,提高電網(wǎng)
2023-11-06 11:10:353034 伺服位置誤差大的原因及解決方法 伺服電機是一種精密控制裝置,可以實現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機械結構、控制系統(tǒng)、環(huán)境因素、測量誤差
2023-12-25 13:57:529863 電機電角度和機械角度之間的關系是電機控制和運行中的重要概念。了解電機電角度和機械角度之間的關系對于電機的控制和使用至關重要。在這篇文章中,我們將詳細介紹電機電角度和機械角度的概念、它們之間的關系
2023-12-27 18:03:508110 靜止無功補償與動態(tài)無功補償有哪些區(qū)別呢? 靜止無功補償和動態(tài)無功補償是電力系統(tǒng)中常用的無功補償技術,兩者在原理、應用和效果等方面有著明顯的區(qū)別。下面將詳細介紹靜止無功補償和動態(tài)無功補償的區(qū)別。 一
2024-01-23 16:28:105386 應變片產(chǎn)生溫度誤差的原因及減小或補償溫度誤差的方法是什么? 溫度誤差是指應變片在測量過程中所得到的溫度與實際溫度之間的差異。應變片產(chǎn)生溫度誤差的原因有很多,主要包括材料的熱膨脹、溫度梯度引起的位移
2024-02-04 17:31:049397 為什么發(fā)相同的脈沖數(shù)但步進電機走的角度會有規(guī)律的減少? 步進電機是一種特殊類型的電機,它以固定的角度(步長)移動。當輸入相同數(shù)量的脈沖時,步進電機的角度變化應該是相同的,但有時候我們會發(fā)現(xiàn)角度會有
2024-02-06 14:50:072514 在當今的自動化設備中,二相步進電機作為一種常見的驅(qū)動元件,其精確控制步進角度的功能尤為重要。那么,博揚智能如何調(diào)整二相步進電機的步進角度呢?
2024-03-25 17:49:583063 
不是所有的東西都完美無瑕疵,就像電子產(chǎn)品都會出現(xiàn)一定的誤差一個道理。今天小編將要說的就是晶振誤差的相關問題,晶振的誤差是怎么回事呢?
2024-05-09 14:33:242219 控制普通電機的轉動角度是一個涉及多個領域的技術問題,包括電機控制理論、傳感器技術、微控制器編程等。 1. 電機類型和選擇 首先,需要確定使用的電機類型。常見的電機類型包括直流電機(DC)、步進電機
2024-09-03 10:42:112715 主驅(qū)電機是電動汽車核心的部件之一,主要作用是產(chǎn)生驅(qū)動扭矩或制動扭矩,驅(qū)動車輛前進并進行動能回收。扭矩估算算法也成為主驅(qū)電機扭矩安全的重點。目前常用的扭矩估算算法有三種,分別是:電流法、功率法和查表法。本文將就這三種算法進行展開講解。
2025-03-17 16:26:451091 
高端制造業(yè)對微米級精度的測量需求,使得測量設備的“精度真實性”遠比“精度數(shù)值”更重要。而傳統(tǒng)三坐標測量機長期被“補償思維”主導,主要依賴21項系統(tǒng)誤差的軟件補償,其中角度誤差由于X/Y/Z三軸的角度
2025-08-22 11:00:051005 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論