摘 要:針對民用航空領(lǐng)域的應(yīng)用需求,設(shè)計了一款基于S3C6410微處理器的RFID讀卡器,給出了具體的硬件設(shè)計方案,詳細介紹了LINUX下應(yīng)用程序與底層驅(qū)動的工作流程,最后印證了系統(tǒng)運作
2012-04-27 11:02:14 4267
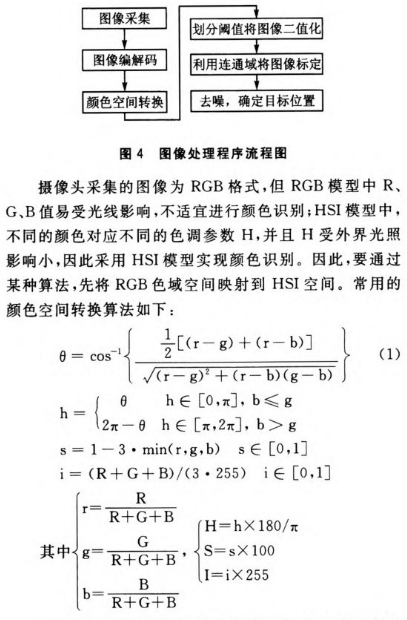
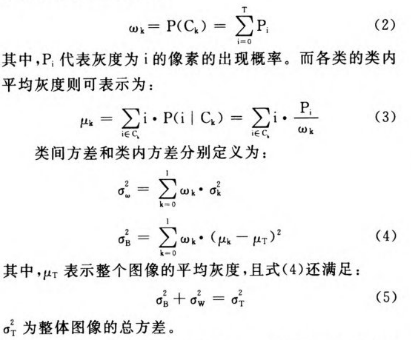
4267 策略規(guī)劃層中,由于圖像信息具有信息豐富、對場景描述完全的特點,主要通過處理攝像頭采集的圖像信息實現(xiàn)顏色目標定位。這里采用Linux嵌入式操作系統(tǒng),由于嵌入式系統(tǒng)資源的限制,要求目標識別算法運行效率高,占用內(nèi)存空間小。
2022-03-31 10:46:494512 
各位大俠,s3c6410支持哪些屏幕啊?隨便買個屏幕都可以用嗎?
2013-11-09 11:12:22
我在s3c6410的xu***xti和xu***xto的腳位上接了一個48M晶振(如圖所示),可ARM板啟動后測得晶振頻率為16M,并且USB口不能工作(USB驅(qū)動已經(jīng)裝上了),在此請教高手幫著指點一二,這個問題已經(jīng)困惑我好長時間了,在這先謝謝了{:soso_e179:}
2011-10-10 09:55:09
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
目前產(chǎn)業(yè)機器人僅能在嚴格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動作,缺乏對環(huán)境的感知與應(yīng)變能力,這極大地限制了機器人的應(yīng)用。利用機器人的視覺控制,不需要預(yù)先對產(chǎn)業(yè)機器人的運動軌跡進行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
的三維世界的識別。機器人視覺主要研究用計算機來模擬人的視覺功能從客觀事物的圖像中提取信息,進行處理并加以理解,最終用于實際檢測、測量和控制。機器視覺是人工智能正在快速發(fā)展的一個分支。簡單說來,機器視覺就是
2020-08-28 10:48:50
現(xiàn)在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現(xiàn)在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關(guān)鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
1、機器人的控制系統(tǒng)“控制”的目的是使被控對象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質(zhì)”是對驅(qū)動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
安全,對一些特殊工種,如噴涂,鑄造等通過勞動法強制采用工業(yè)機器人來代替,這樣可以大大增加工業(yè)機器人的需求數(shù)量。視覺機器人我國的機器人產(chǎn)業(yè)化必須由市場來拉動,機器人作為高新技術(shù),它的發(fā)展與社會的生產(chǎn)、經(jīng)濟狀況
2016-09-08 10:34:05
傳感器技術(shù)是仿人機器人研究的關(guān)鍵技術(shù)之一。仿人機器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因為它能夠通過傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機器人
2019-09-18 06:17:46
的集中視覺足球機器人底層控制系統(tǒng),簡化了系統(tǒng)設(shè)計, 滿足微型機器人的控制需要。同時, 也有利于足球機器人自主化的轉(zhuǎn)型和發(fā)展。
2009-03-28 14:03:25
為對幾何體的識別和抓放過程?利用邊緣提取、濾波去噪、圓心檢測等算法采用LabVIEW視覺模塊及其庫函數(shù)進行了圖像的預(yù)處理、特征提取以及中心點定位?研究結(jié)果表明基于LabVIEW的Tripod機器人系統(tǒng)能夠準確識別平臺幾何體的顏色和形狀可較為精確地定位幾何體中心滿足后續(xù)控制的要求
2019-06-01 06:00:00
LabVIEW開發(fā)六軸工業(yè)機器人運動控制系統(tǒng)
本項目開發(fā)了一個高效的工業(yè)機器人控制系統(tǒng),重點關(guān)注于運動學(xué)算法和軌跡規(guī)劃算法的實現(xiàn)和測試。LabVIEW作為一個關(guān)鍵技術(shù),在項目中扮演了核心角色
2023-12-21 20:03:18
自動或半自動機器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺,以滿足復(fù)雜系統(tǒng)的需求。從尖端的機器人研究項目直至高級行業(yè)應(yīng)用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
本人正在學(xué)習(xí)ARM開發(fā), 開始在淘寶上買了S3C6410的ARM 11開發(fā)板, 但后來在網(wǎng)上搜索了下, 基本上ARM的招工單位都要求用STM32.所以我的疑問是, 在目前的市場和未來的方向上, 是S3C6410將占主流還是STM32占主流?
2014-06-14 11:59:28
ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺是什么?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些技術(shù)性能?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺的結(jié)構(gòu)是由哪些部分組成的?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些配套軟件?
2021-08-09 06:22:03
S3C6410的USB通訊小項目外包:硬件:S3C6410開發(fā)板(用現(xiàn)成的)軟件要求:通過USB線使S3C6410開發(fā)板能與PC機通訊下載文件。 說明:其實開發(fā)板上的EBOOT已經(jīng)
2010-09-29 14:52:53
機器人在之前的機器人的基礎(chǔ)上,加入了可以自由便捷的運動功能,兩個攝像頭精準拍攝、全方位的視覺功能,還有一個超聲傳感器功能。傳感器可以識別人類和NAO機器人的接觸,從而做些動作和人類互動,所以說NAO機器人機器人真的可以讓我們體驗到智能的時代。
2015-02-13 15:43:24
的應(yīng)用,利用USB攝像頭采集成圖像,經(jīng)自動識別后控制機器人動作。這是一個平臺類的產(chǎn)品設(shè)計工程,調(diào)整程序就可適用于相關(guān)的娛樂,教學(xué),護理等機器人系統(tǒng)中。
2015-07-25 11:19:27
拿到一個題目,視覺采摘機器人。目前對視覺處理方面毫無頭緒,由于條件有限,只做出概念實物。機器人只有達到識別該果蔬并采摘下來的效果。有沒有大神提供一下思路。
2018-04-10 09:22:27
方面的原理,在線的實時調(diào)整圖像雅可比矩陣。通過二維的圖像特征信息反饋,這種方式對攝像機模型誤差和機器人模型誤差、圖像誤差、圖像噪聲不敏感。基于圖像跟蹤的視覺跟蹤控制系統(tǒng),如圖4。 控制量c為機器人
2014-08-04 11:32:43
三星S3C6410芯片手冊
2016-01-29 13:47:21
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機器人控制系統(tǒng)采用國際流行的開放式軟硬件平臺,配以自主研發(fā)的避障控制卡、牽引運動卡及機器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
本文以6- PPPS并聯(lián)機器人為控制對象,以NI公司的系列軟硬件產(chǎn)品為基礎(chǔ),依托國家自然基金(No. 30770538)的支持,快速開發(fā)了此并聯(lián)機器人的開放式數(shù)字控制系統(tǒng)。
2021-05-12 06:38:22
和提高工作效率,就必須引入機器視覺技術(shù)來實現(xiàn)對目標的識別和定位。目前,裝備了機器視覺系統(tǒng)的工業(yè)機器人已經(jīng)被應(yīng)用于許多領(lǐng)域。在許多自動化的生產(chǎn)線上,最后一道工序就是把產(chǎn)品擺放整齊,然后打包成型,而許多行業(yè)的產(chǎn)品體積
2021-04-29 09:42:45
S3C6410的USBWIFI支持(Android2.1) Topic:S3C6410支持USB WFI//整理:友堅科技http://www.urbetter.com
2010-12-16 09:09:44
在當今的機器人領(lǐng)域,基于視覺的人臉面部識別和檢測發(fā)展得非常之快,并且已經(jīng)運用于很多領(lǐng)域。
2019-09-17 09:11:43
OK6410+QT移植百科全書 下載地址:基于S3C6410的QT移植方法及源碼下載地址:百度網(wǎng)盤:http://pan.baidu.com/s/1hqCf03q
2015-05-19 17:39:29
基于S3C6410的無線視頻傳輸節(jié)點設(shè)計
2015-03-27 14:54:45
協(xié)調(diào)完成多傳感信息的融合,而運動執(zhí)行層完成機器人行走。圖1為智能導(dǎo)覽機器人的總體結(jié)構(gòu)框圖。3 導(dǎo)覽機器人硬件設(shè)計3.1 人工智能層硬件實現(xiàn) 考慮到移動機器人控制系統(tǒng)要求處理速度快、方便外圍設(shè)備擴展
2019-07-04 08:30:00
感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機器人中應(yīng)用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人
2019-06-21 07:04:37
研究的前沿,它在一定程度上代表了一個國家的高科技發(fā)展水平。運動控制系統(tǒng)是機器人控制技術(shù)的核心,也是機器人研究領(lǐng)域的關(guān)鍵技術(shù)之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構(gòu)都把對機器人運動控制系統(tǒng)的研究作為首要任務(wù)。
2020-08-19 06:57:09
。實物圖如圖2-4 所示。
圖 2-4 環(huán)形光源實物圖
基于伊瑟特的六自由度機器人視覺伺服控制系統(tǒng)如圖 2-5 所示。
設(shè)計演示
視覺伺服性能分析
視覺伺服要求從對目標的識別到控制之間
2024-05-29 16:17:06
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統(tǒng)的研究是機器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
最近想做個機械視覺的東西,我還看了s5pv210,資料太少不敢選現(xiàn)在糾結(jié)的是s3c6410性能要強很多,但是資料不如2440多我是新手,想先做實物,完成對坐標的標定,不知道哪個上手合適?
2014-01-09 09:05:20
?舉例: 工業(yè)機器人系統(tǒng)由三大部分六個子系統(tǒng)組成,1、三大部分是:(1)機械部分(2)傳感部分(3)控制部分2、六個系統(tǒng)(1)驅(qū)動系統(tǒng),要使用機器人的運行起來,就需給各個關(guān)節(jié)即每個運動自由度安置
2016-03-06 12:56:19
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發(fā)智能機器人控制系統(tǒng)?
2021-12-23 06:55:02
如何在S3C6410的板子上安裝Ubuntu?
2022-01-13 06:12:06
,導(dǎo)航技術(shù),計算機技術(shù),人工智能等多個領(lǐng)域,因而對移動機器人的控制部分提出很高的要求,特別是視覺傳感器的出現(xiàn),要求控制系統(tǒng)不僅存儲量大,而且處理速度快等。以往基于PLC和單片機控制的移動機器人就不能很好
2020-11-23 15:08:52
小白求助,求基于嵌入式處理器S3C2440為核心的多任務(wù)機器人控制系統(tǒng)
2021-10-21 08:28:01
移動機器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠?qū)崿F(xiàn)動態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機器人系統(tǒng)通常分為機構(gòu)本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對機構(gòu)本體進行
2020-03-06 07:07:07
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機器人控制系統(tǒng)設(shè)計。該服務(wù)機器人的控制系統(tǒng)是機器人的神經(jīng)中樞,因而其設(shè)計是機器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機二級分布式結(jié)構(gòu)。
2019-10-15 08:03:16
最近在看工業(yè)機器人的資料,想知道現(xiàn)在的一些市面上的工業(yè)機器人上用的控制控制系統(tǒng)都有哪些廠商呀?
2015-01-23 12:04:01
。可以進行六軸機器人示教、定位、抓取、裝配等訓(xùn)練,包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系統(tǒng)及
2021-07-01 11:48:31
在物流搬運行業(yè),拳頭機器人由于其獨特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
隨著計算機科學(xué)和自動控制技術(shù)的發(fā)展,越來越多的不同種類的智能機器人出現(xiàn)在工廠、生活當中,機器人視覺系統(tǒng)作為智能機器人系統(tǒng)中一個重要的子系統(tǒng),也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
視覺系統(tǒng)的發(fā)展趨勢怎么樣?3D視覺系統(tǒng)應(yīng)用在哪些方面?未來的機器人3D視覺系統(tǒng)將會發(fā)生什么樣的變化?
2021-05-11 06:40:14
什么是激光SLAM?激光SLAM技術(shù)在機器人運動控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
足球機器人控制中的應(yīng)用--畢業(yè)論文足球機器人融合了計算機視覺、模式識別、決策對策、自動控制、無線通信、多智能體合作等多項摘要 技術(shù),具有極高的研究價值。本文設(shè)計了基于A R M 7微處理器的集中視覺
2009-05-25 15:35:22
遠程遙控的類人機器人系統(tǒng)
2013-04-14 00:57:48
,年均增長31%,預(yù)計2023年我國工業(yè)機器人市場增速將在20%至25%左右,仍會維持較快的增速。 飛凌嵌入式作為一家專注嵌入式核心控制系統(tǒng)研發(fā)與制造的高新技術(shù)企業(yè),經(jīng)過多年的研發(fā)與積累,產(chǎn)品已廣泛應(yīng)用
2023-02-24 17:05:21
0引言傳感器技術(shù)是仿人機器人研究的關(guān)鍵技術(shù)之一。仿人機器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因為它能夠通過傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿
2019-07-29 06:09:58
基于DM642的機器人雙目視覺系統(tǒng)設(shè)計
2021-04-02 07:20:41
本文提出了一種以ARM9 為主控制器的新型的仿人機器人分布式控制系統(tǒng)。單片機和外部計數(shù)器組成關(guān)節(jié)控制器。主控制器和關(guān)節(jié)控制器之間采用USB 通信。從而實現(xiàn)了控制系統(tǒng)的小型
2009-05-25 15:57:44 45
45 論述了由嵌入式計算機組成的3 層仿人機器人控制系統(tǒng),并詳細介紹了其中的關(guān)節(jié)控制器。控制系統(tǒng)實行逐級控制,任務(wù)分散,提高了機器人的智能化程度。關(guān)節(jié)控制器選用TM320F2811
2009-08-05 10:51:4424 1.1 S3C6410 Pin Description.61.2 Pin Power Domain.141.3 Booting Option..151.4 Feature of the IROM
2010-08-03 09:59:110 控制方案實現(xiàn)高效自動化作業(yè)。機器人機械臂末端可定制末端夾具,車身可定制物料緩存架。技術(shù)優(yōu)勢經(jīng)世智能復(fù)合機器人產(chǎn)品使用了自主研發(fā)的復(fù)合機器人一體化控制系統(tǒng)和復(fù)合機器人
2025-08-13 10:06:22
產(chǎn)品簡介經(jīng)世智能3C電子行業(yè)物料轉(zhuǎn)運復(fù)合機器人,復(fù)合機器人在3C電子行業(yè)聚焦物料轉(zhuǎn)運與倉儲管理、精密設(shè)備上下料、裝配站機臺上下料等應(yīng)用場景。機器人機械臂末端可定制末端夾具,車身可定制物料緩存架
2025-08-13 13:53:28
摘 要:基于機器人復(fù)雜的決策控制和步態(tài)管理,采用了個人數(shù)字助理(PDA)和數(shù)字信號處理器(DSP)組合,并以Windows Mobile作為軟件平臺。具體分析了控制系統(tǒng)的硬件設(shè)計和軟件設(shè)計方法。真實環(huán)境中的實驗及比賽結(jié)果證明,該控制系統(tǒng)可以實現(xiàn)機器人的復(fù)雜控制。 關(guān)鍵
2011-03-01 00:40:0460 S3C6410開發(fā)板采用核心板加底板設(shè)計,核心板上集成了Samsung 533/667M CPU S3C6410(ARM1176JZF-S內(nèi)核)、128M Mobile DDR和256M Nand Flash,通過4個1.27mm雙排插針引出所有信號。底板可支持我司S3C6410和S3C
2011-04-29 15:25:170 設(shè)計并實現(xiàn)了一種基于S3C6410的智能泵組控制器。該控制器是網(wǎng)絡(luò)技術(shù)與消防系統(tǒng)、遠程監(jiān)控的綜合運用,具備采集消防系統(tǒng)中泵組的多信息源、通過網(wǎng)絡(luò)實時報告狀態(tài)、自動診斷故障、
2013-09-25 15:09:5029 S3C6410的Jlink的調(diào)試 方 法
2015-10-29 10:57:080 三星S3C6410開發(fā)板的PCB封裝庫
有需要的下來看看
2015-12-29 17:57:410 S3C6410核心板,PCB文件。
2016-04-05 15:28:390 S3C6410簡介,有需要的朋友可以下來看看
2016-08-23 16:46:410 如何選擇適合產(chǎn)品開發(fā)的S3C6410開發(fā)板(硬件篇)
2016-08-23 16:46:4112 遠程遙控的類人機器人系統(tǒng)
2017-10-17 13:32:4314 S3C6410的u-boot分析與移植
2017-10-31 14:44:4128 三星目前推出了S3C6400和S3C6410,都是基于ARM架構(gòu)的,而且硬件管腳兼容,應(yīng)該說大致的功能基本相同,比較明顯的區(qū)別就是S3C6410帶有2D/3D硬件加速
2017-11-02 14:16:588281 印效率低、結(jié)構(gòu)復(fù)雜和功能單一等缺點,不能滿足現(xiàn)代企業(yè)流水式作業(yè)的要求。 本文結(jié)合項目的需求從硬件和軟件兩個方面對系統(tǒng)進行了升級和改進,設(shè)計了一種基于S3C6410處理器和WICNE6.0操作系統(tǒng)為核心的高解析噴碼機控制系統(tǒng)。該
2018-01-25 15:49:067 關(guān)鍵詞:智能家居 , S3C6410 本文利用S3C6410主控板、STM32、wifi模塊、GSM模塊及多種移動終端設(shè)計一個智能家居系統(tǒng),使分立的設(shè)備通過無線和有線網(wǎng)絡(luò)組成一個相互聯(lián)系、協(xié)同操作
2018-09-23 14:25:02535 本文檔的主要內(nèi)容詳細介紹的是S3C6410開發(fā)板S3C-U-BOOT-1.1.6的詳細資料免費下載。
2018-09-29 09:48:4632 存儲空間,從而給終端用戶更優(yōu)越的性能體驗。S3C6410在增加以上功能外又增有USB 2.0 OTG控制器、視頻硬件解碼和2D、3D加速器等功能,用以給用戶更強大、更自由的應(yīng)用空間,更多的多媒體視覺
2019-04-02 14:36:341055 工業(yè)機器人是一個復(fù)雜的集成系統(tǒng),機器人本體就是它的身體,眼睛就是它的視覺系統(tǒng)等等,今天我們來說一下,工業(yè)機器人的“大腦”——控制器。機器人的控制系統(tǒng)就是機器人的核心,工業(yè)機器人在工作時離不來控制系統(tǒng)的指揮。
2019-09-30 11:32:144296 機器人的控制系統(tǒng),就相當于人體的大腦,是機器人的核心組成部分。關(guān)于機器人的控制系統(tǒng)有哪些分類呢?機器人控制系統(tǒng)按其控制方式可分集中控制系統(tǒng)、主從控制系統(tǒng)及分散控制系統(tǒng),下面為大家詳細講講這些系統(tǒng)。
2019-11-04 08:45:3328262 視覺是人類感知外界信息的重要手段,視覺伺服系統(tǒng)是機器人獲取環(huán)境信息的關(guān)鍵組成部分。本文主要討論仿人機器人BHR-1的視覺伺服系統(tǒng)。首先介紹機器人頭部的視覺總體結(jié)構(gòu)方案,然后論述了基于立體視覺的信息處理和頭部運動控制,最后通過目標跟蹤和物體抓取實驗說明了系統(tǒng)的可行性。
2021-04-13 12:00:373983 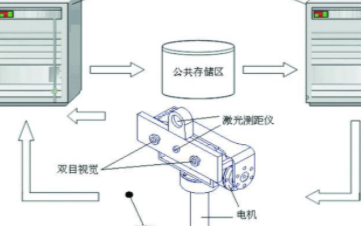
視覺跟蹤的實時性是仿人機器人的重要性能要求之一。針對這一系統(tǒng)要求,近年來有很多學(xué)者設(shè)計出了多種系統(tǒng)結(jié)構(gòu)。文中作者設(shè)計了一種基于CAN總線的分布式的仿人機器人的控制系統(tǒng),其中的視覺系統(tǒng)通過無線局域網(wǎng)
2021-04-13 14:18:463971 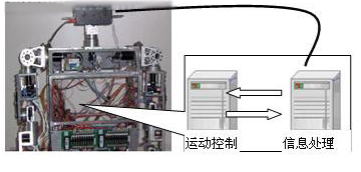
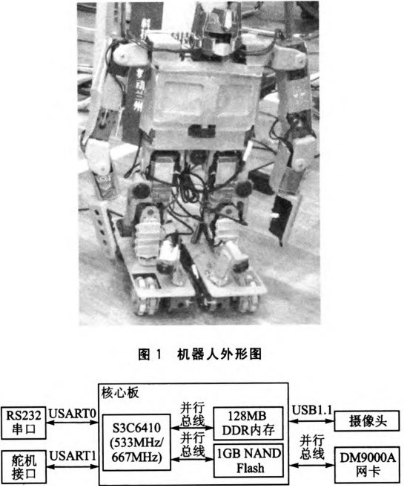
在武術(shù)擂臺技術(shù)挑戰(zhàn)賽中,機器人要采集目標的位置信息。由于I/O、A/D轉(zhuǎn)換的有效檢測距離有限,機器人采用攝像頭采集場地上的圖像信息,根據(jù)目標的顏色進行識別、定位。當檢測到目標位置以后控制舵機自主運動向目標靠攏,完成自我介紹、抱繡球等動作。所設(shè)計的機器人外形如圖1所示。
2021-04-13 15:22:512259 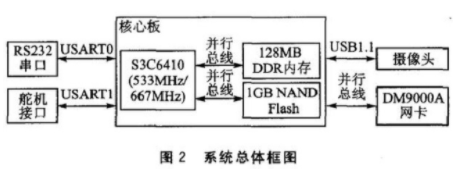
S3C6410(ARM11)嵌入式控制系統(tǒng)液晶顯示驅(qū)動問題研究(嵌入式開發(fā)工程師工作內(nèi)容)-S3C6410(ARM11)嵌入式控制系統(tǒng)液晶顯示驅(qū)動問題研究? ? ? ? ? ? ??
2021-07-30 14:51:2716 電子發(fā)燒友網(wǎng)站提供《基于S3C6410和無線傳感器網(wǎng)絡(luò)的手持終端設(shè)計.pdf》資料免費下載
2023-10-27 09:51:040 電子發(fā)燒友網(wǎng)站提供《基于S3C6410平臺的RFID手持終端的設(shè)計與實現(xiàn).pdf》資料免費下載
2023-11-13 10:03:020 機器人控制系統(tǒng)是機器人技術(shù)的核心,它負責接收輸入信號,處理信息,控制機器人的運動和執(zhí)行任務(wù)。一個完整的機器人控制系統(tǒng)通常由以下幾個部分組成: 傳感器系統(tǒng) 傳感器系統(tǒng)是機器人控制系統(tǒng)的重要組成部分,它
2024-06-16 15:14:573055
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論