今天主要和大家聊一聊,如何使用Linux中線程同步方式中的條件變量。
2022-11-08 09:16:13 754
754 Linux是一個多用戶的操作系統(tǒng)。多用戶意味著每個用戶登錄系統(tǒng)后,都有自己專用的運行環(huán)境。而這個環(huán)境是由一組變量所定義,這組變量被稱為環(huán)境變量。用戶可以對自己的環(huán)境變量進行修改以達(dá)到對環(huán)境的要求。
2022-11-14 12:01:17668 Linux 是一個多用戶的操作系統(tǒng)。多用戶意味著每個用戶登錄系統(tǒng)后,都有自己專用的運行環(huán)境。而這個環(huán)境是由一組變量所定義, 這組變量被稱為環(huán)境變量。用戶可以對自己的環(huán)境變量進行修改以達(dá)到對環(huán)境的要求。
2022-11-21 11:43:56678 在ADS中,如果要掃描一個參數(shù),通常是定義一個變量,用這個變量給元件參數(shù)賦值,再通過控件掃描這個變量。
2023-07-05 11:31:3720435 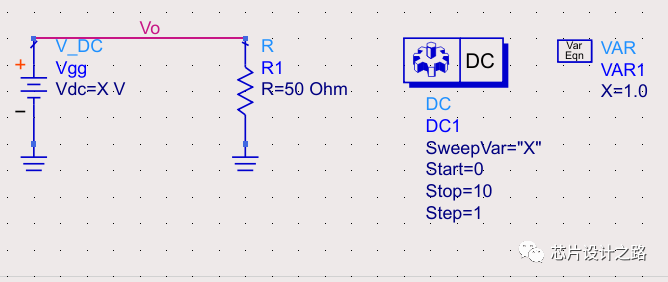
KUKA庫卡機器人伺服驅(qū)動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應(yīng)用于工業(yè)機器人及數(shù)控加工中心等自動化設(shè)備中。是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于
2020-09-08 16:30:28
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機
2021-09-17 07:09:52
這個是KUKA重型機器人處理和測量混凝土軌枕的視頻。處理得相當(dāng)精細(xì)。真心值得愛好機器者和愛國者研究研究。
2015-02-03 15:18:31
大家好,我正在執(zhí)行需要在8個狀態(tài)之間切換的S參數(shù)模擬。我有8個變量來控制系統(tǒng)所處的狀態(tài),即如果var1 = 1,則系統(tǒng)處于狀態(tài)1.對于每個狀態(tài),我需要執(zhí)行頻率掃描。目前,我通過手動切換8個變量中
2019-07-31 14:17:10
APM-AMP-APO
2023-03-28 14:49:12
TRUMETER - APM-M2-APO - ADVANCED PANEL METER, VOLT/AMP/FREQ
2024-06-20 20:58:12
的平衡。接下來的內(nèi)容是關(guān)于目前在ComputeColStats中用的一些近似算法。二,收集的內(nèi)容目前針對列主要會收集以下統(tǒng)計信息:cntRows : 列中總數(shù)據(jù)個數(shù),包括nulll值avgColLen
2018-04-26 15:42:54
是局部變量,這些變量保證了shell的正常運行。下面就介紹下shell中的特殊變量。Shell特殊變量Shell 中的特殊變量主要有以下幾個:$0, $#, $*, $@, $?, $下面會分別介紹下
2018-08-28 14:14:52
環(huán)境變量一般是指操作系統(tǒng)中指定操作系統(tǒng)運行環(huán)境的一些參數(shù)。它相當(dāng)于一個指針,想要查看變量的值,需要加上“$”。
2019-07-25 07:59:59
,全局變量用于將其值返回給系統(tǒng)的兩個選定參數(shù)。?因此,無需從目錄中讀取或重新計算任何參數(shù)。參數(shù)耦合的特殊示例?關(guān)閉源代碼編輯器后,將顯示已定義的全局變量“光柵高度”(“ GratingHeight
2020-04-17 11:43:32
的依存關(guān)系。例如,在此示例中,我們使用參數(shù)耦合來確保用戶編程的傾斜光柵介質(zhì)的z軸擴展長度與包含該結(jié)構(gòu)的結(jié)構(gòu)化層的厚度一致性。
2.參數(shù)運行的初始化
我們希望鏈接光學(xué)系統(tǒng)的兩個參數(shù),以便它們自動取相同的值
2025-03-17 11:11:02
指針與變量注:keil中單片機C編程若指針沒有指向提前聲明的變量,會產(chǎn)生混亂eg:情景一:情景二:Type *p,*q;Type *p,*q,pp,qq;給指針p賦值;p=&pp;給指針q
2021-07-14 08:35:42
使用過codewarrior IDE的網(wǎng)友都知道,Codewarrior有一個很好的特性就是變量值可以直接在程序運行中查看,而且無需停止。但是目前免費的KDS直接點擊運行,在expressions
2016-06-23 14:10:08
editor,導(dǎo)入。比如把config.txt中2的example.txt干掉改成我們合并的txt文件即可。注意下,REW導(dǎo)出的文件可以直接被APO使用,但是需要增加左右屬性。然后見證奇跡的時候就會
2021-05-07 11:33:40
1、proteus仿真中對于芯片運行中自定義變量的隨時查看變量變化不好掌握,本人暫時不知道軟件仿真中有沒有這個查看變量的功能(貌似只有幀暫停查看查看芯片寄存器、存儲器的功能)方法:程序內(nèi)將需要查看
2021-12-01 07:51:36
,延長了變量生存空間;用在函數(shù)上表示僅限當(dāng)前文件使用
register:將頻繁使用的變量放到通用寄存器中,避免頻繁訪問內(nèi)存,直接從寄存器中取值,提高cpu的工作效率;注:只能將局部變量或形式參數(shù)定義為
2025-11-21 07:05:24
層之間的互感。我意識到我可以運行10個模擬,并且對于每個模擬,我可以從S參數(shù)獲得Z21或Z12,但是運行多個模擬需要太長時間。我使用過Sonnet EM,我可以在堆棧中添加一個名為H的變量,并改變這些
2019-01-10 16:01:25
我們知道在高頻電路中,我們不能用一個確定的數(shù)值來代表這個元器件的特性,因為隨著頻率的變化其的特性也在發(fā)生變化。也不能讓系統(tǒng)只工作在一個頻率上面。此時直流電路中的歐姆定律概念已經(jīng)失效,現(xiàn)在需要引入
2019-06-28 07:24:14
個路徑下輸入, 都是可以執(zhí)行成功的, 因為系統(tǒng)已經(jīng)把命令的搜索路徑提前設(shè)置好了。常用變量 PATH 決定了要去哪個路徑下去尋找我們的程序或者命令,在以后的開發(fā)過程中, 我們要經(jīng)常修改這個變量。5.11.2
2022-04-28 16:07:47
非線性與多變量系統(tǒng)相關(guān)辨識主要研究單變量線性系統(tǒng)以及非線性系統(tǒng)Wiener模型和Hammerstein模型的線性子系統(tǒng)的脈沖響應(yīng)函數(shù)的辨識,差分模型的全結(jié)構(gòu)與參數(shù)的辨識,以及線性隨
2009-01-14 22:32:02 0
0 文章介紹和分析了多變量廣義預(yù)測控制算法,基于JX-300X 集散控制系統(tǒng)(DCS),搭建了鍋爐液位和溫度控制系統(tǒng),根據(jù)被控對象的特點,將多變量廣義預(yù)測控制應(yīng)用于該對象的控
2009-09-03 10:43:5215 本文提出了在嵌入式系統(tǒng)運行參數(shù)遠(yuǎn)程修改中應(yīng)用UDP 協(xié)議的技術(shù),詳細(xì)介紹了系統(tǒng)相關(guān)通信協(xié)議及其實現(xiàn)過程,并給出了相應(yīng)的代碼。最后
2009-09-15 08:22:2712 【摘 要】 對單片機控制系統(tǒng)運行參數(shù)有效性的判別方法進行了介紹,并對系統(tǒng)運行參數(shù)如何實現(xiàn)保存進行了探討。同時給出了存儲過程中的數(shù)據(jù)校驗和運行參數(shù)的取值范圍檢驗
2009-05-14 20:33:451144 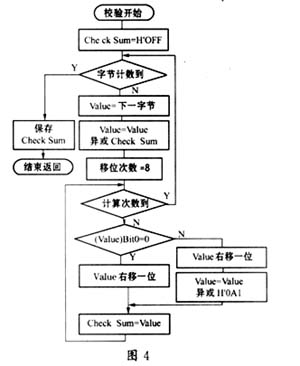
基于偏差補償輔助變量法的舵機參數(shù)辨識...
2016-01-06 11:40:100 運行數(shù)據(jù)是大數(shù)據(jù)系統(tǒng)中增長最快、最為復(fù)雜也是最有價值的數(shù)據(jù)資源之一。基于運行數(shù)據(jù),軟件開發(fā)者可以分析關(guān)于軟件質(zhì)量和開發(fā)模型的重要信息。Spark作為一個分布式系統(tǒng),在運行過程中會產(chǎn)生大量的運行
2017-12-06 09:16:500 漆包線規(guī)格參數(shù)及近似英規(guī)線號,varnished wire
關(guān)鍵字:漆包線規(guī)格對照表
漆包線規(guī)格參數(shù)及近似英規(guī)線號varnished
2018-09-20 18:28:084506 我們想要運行python,需要安裝Python,還要設(shè)置一些環(huán)境變量1,此電腦,右鍵屬性2、高級系統(tǒng)設(shè)置-> 環(huán)境變量3、在系統(tǒng)變量中找到path,雙擊它,在分號后面添加python的軟件安裝目錄4、找到window PowerShell5、輸入python 會顯示軟件的版本,就設(shè)置完畢了
2018-11-10 14:49:571106 C語言中使用關(guān)鍵字register來聲明局部變量為寄存器變量。寄存器變量的值會被存放在CPU的寄存器中,每當(dāng)需要使用它們時,CPU就可以直接使用,而無須再通過控制器從內(nèi)存中獲取。由于操作寄存器的速度遠(yuǎn)高于操作內(nèi)存,所以正確地使用寄存器變量能夠有效地提高程序運行效率。
2019-06-03 10:13:262863 本文檔的主要內(nèi)容詳細(xì)介紹的是數(shù)組中變量取值范圍如何進行糾正。
2019-12-17 17:08:164 變量$TORQMON包含程序模式下軸轉(zhuǎn)矩的當(dāng)前公差范圍。該公差范圍是使用文件…STEU Mada $ custom.dat中的變量$TORQMON_DEF定義的。
2020-06-11 16:25:118975 該變量最多可用于編程6個函數(shù)發(fā)生器。函數(shù)發(fā)生器僅對CP運動有效。僅評估主運行變量。
可以在機器人程序中相對于提前運行修改功能參數(shù)。
2020-07-03 09:32:333503 
必須正確設(shè)置本節(jié)中的參數(shù),才能使Interbus連接正常運行。插圖中指定的值對應(yīng)于默認(rèn)設(shè)置,該設(shè)置在系統(tǒng)出廠時由KUKA預(yù)裝時有效。一些參數(shù)控制了底層控制計算機的硬件接口的保留,而其他系統(tǒng)組件可能不會同時使用這些保留。
2020-08-07 17:12:553172 
因此我就想如果我想在KUKA 機器人初期調(diào)試工作過程中減少互鎖區(qū)設(shè)置失誤而碰撞的損失,我們可否給變量$ TORQMON 減小。
2020-09-04 16:53:194131 每一個任務(wù)都有自己的上下文。上下文保存在任務(wù)控制塊中, 是任務(wù)轉(zhuǎn)為運行狀態(tài)時要查看的CPU的環(huán)境資源和系統(tǒng)資源。一個任務(wù)的上下文包括: 任務(wù)程序計數(shù)器、CPU寄存器和浮點寄存器、動態(tài)變量和調(diào)用函數(shù)的棧
2020-09-04 17:00:203196 對于舊的8.2X系統(tǒng)使用的外部軸插件是SynchroMove 對于最新8.3X系統(tǒng) 要分兩種: WorkVisualAddOnVKR: 用于氣伺服焊鉗和其他軟件控制電伺服焊鉗或其他伺服設(shè)備(由機器人
2020-10-27 17:56:023120 
那么,看到這里你可能就明白了:其實在程序運行的過程中,完全不需要變量名的參與。變量名只是方便我們進行代碼的編寫和閱讀,只有程序員和編譯器知道這個東西的存在。而編譯器還知道具體的變量名對應(yīng)的「內(nèi)存地址」,這個是我們不知道的,因此編譯器就像一個橋梁。
2020-12-09 16:05:055751 。 程序中多數(shù)指令都通過變量來操作。? 為指令分配變量后,即會使用指定變量的值來執(zhí)行該指令。 變量在 TIA Portal 中集中管理。? 在程序編輯器中創(chuàng)建 PLC ?變量與在 PLC ?變量表中創(chuàng)建 PLC 變量沒什么區(qū)別。? 如果在程序或 HMI ?畫面的多個位置使用某個變量,則
2020-12-23 16:25:0622308 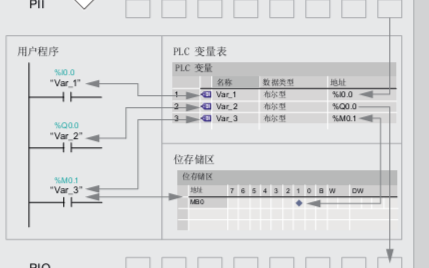
本文檔的主要內(nèi)容詳細(xì)介紹的是LABVIEW初級教程之局部變量與全局變量的詳細(xì)資料說明。
2021-03-29 15:00:4326 $ err 具有有關(guān)當(dāng)前程序信息的結(jié)構(gòu) 該變量可用于評估相對于提前運行的當(dāng)前執(zhí)行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當(dāng)?shù)墓收戏?wù)功能對其進行響應(yīng)。 該變量具有寫保護,只能被讀取
2021-04-12 11:13:472325 /輸出參數(shù)VAR_IN_OUT ... END_VAR 靜態(tài)變量 靜態(tài)變量是本地變量,塊運行時其值被保留。用來保存功能塊的值,并包含在相應(yīng)實例數(shù)據(jù)塊中。 句法
2021-08-25 18:07:1712110 KUKA系統(tǒng)軟件(KSS) 試行版4.1及庫卡編程詞匯手冊
2021-11-10 17:06:330 操作的內(nèi)存可分為以下幾個類別:1、棧區(qū)(stack)— 由編譯器自動分配釋放 ,存放函數(shù)的參數(shù)值,局部變量的值等。其操作方式類似于數(shù)據(jù)結(jié)構(gòu)中的棧。2、堆區(qū)(heap) — 一般由程序員分配釋放, 若程序...
2021-11-30 20:06:045 操作的內(nèi)存可分為以下幾個類別:1、棧區(qū)(stack)— 由編譯器自動分配釋放 ,存放函數(shù)的參數(shù)值,局部變量的值等。其操作方式類似于數(shù)據(jù)結(jié)構(gòu)中的棧。2、堆區(qū)(heap) — 一般由程序員分配釋放, 若程序...
2021-11-30 20:06:068 KUKA機器人PN系統(tǒng)網(wǎng)絡(luò)故障的判斷方法說明。
2022-03-11 10:08:305169 ON_ERROR_PROCEED 可用于抑制由以下程序行觸發(fā)的運行時錯誤消息。機器人控制器跳過觸發(fā)錯誤的語句,并用有關(guān)錯誤的信息填充系統(tǒng)變量 $ERR。
2022-07-01 10:42:323984 該變量可用于評估當(dāng)前執(zhí)行的程序相對于提前運行。例如,該變量可用于評估程序中的錯誤,以便能夠使用合適的故障服務(wù)功能對其進行響應(yīng)。
2022-07-11 10:38:402756 KUKA 8.2系統(tǒng)遠(yuǎn)程連接步驟介紹,實現(xiàn)遠(yuǎn)程訪問需要在KLIconfig.xml文件里進行更改設(shè)置.
2022-07-27 15:56:592554 該變量可用于評估相對于提前運行的當(dāng)前執(zhí)行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當(dāng)?shù)墓收戏?wù)功能對其進行響應(yīng)。
2022-09-14 15:14:071258 上面講了很多系統(tǒng)變量,那么在Linux系統(tǒng)中,這些變量存在哪里呢?為什么用戶一登錄shell就自動有了這些變量呢?我們先來看看下面幾個文件。
2022-11-16 09:46:352507 該變量可用于評估相對于提前運行的當(dāng)前執(zhí)行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當(dāng)?shù)墓收戏?wù)功能對其進行響應(yīng)。
2022-12-06 17:11:461843 通過變量可以讀取許多系統(tǒng)狀態(tài),并且在許多情況下也可以進行設(shè)置。嚴(yán)格來說,這些變量存在多次-每個解釋器一次。對于所有解釋器,它們的名稱相同。
2023-01-03 11:16:572623 在 Linux 系統(tǒng)中,環(huán)境變量是用來定義系統(tǒng)運行環(huán)境的一些參數(shù),常見的環(huán)境變量有HOME,SHELL,PATH等等。
2023-01-18 16:10:003156 Linux是一個多用戶的操作系統(tǒng)。多用戶意味著每個用戶登錄系統(tǒng)后,都有自己專用的運行環(huán)境。而這個環(huán)境是由一組變量所定義,這組變量被稱為環(huán)境變量。用戶可以對自己的環(huán)境變量進行修改以達(dá)到對環(huán)境的要求
2023-01-29 10:55:46780 KUKA大眾版8.2系統(tǒng),配置外部軸需要在項目中進行設(shè)置選擇KPP1項目用于外部軸1和KPP2使用外部軸2.
2023-01-29 15:02:063955 為了能夠計算路徑,例如 對于近似運動,需要使用提前運行指針讀取路徑規(guī)劃數(shù)據(jù)。然而,不僅要處理運動數(shù)據(jù),還要處理用于控制外圍設(shè)備的算術(shù)數(shù)據(jù)和命令。
2023-01-31 09:38:341768 聲明并同時初始化時,每個變量都需要有自己的 DECL 協(xié)議。無法用唯一的 DECL 協(xié)議聲明和初始化多個變量。
2023-02-10 11:37:434523 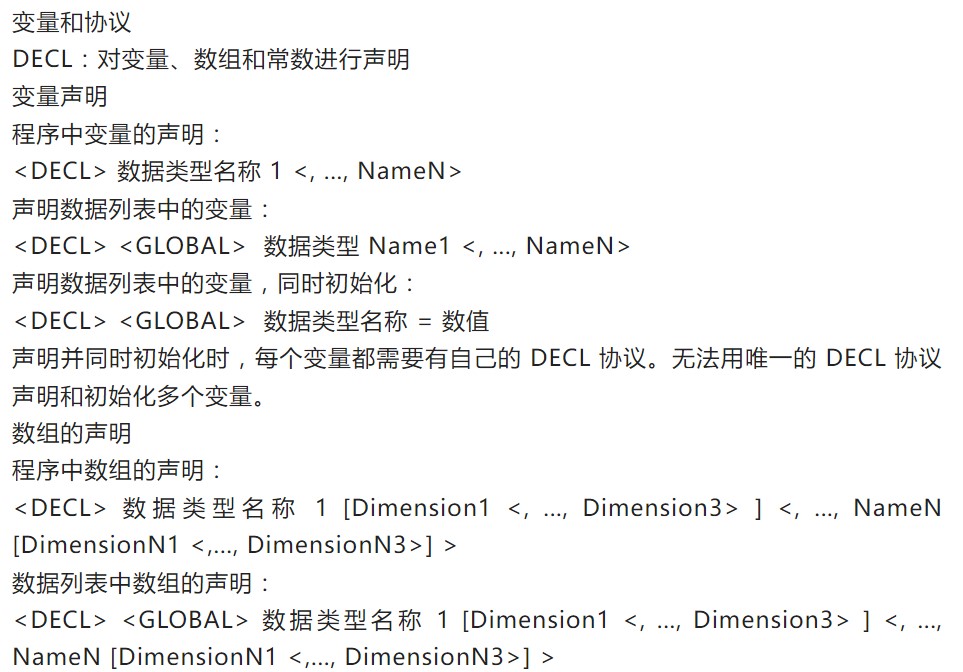
這種傳遞方式也稱為 “Call by Reference”。建議:始終將一個參數(shù)傳遞到相同數(shù)據(jù)類型的變量中。可以將參數(shù)傳遞到另一個數(shù)據(jù)類型中,但是有特定的限制。
2023-03-02 09:33:131632 建議:始終將一個參數(shù)傳遞到相同數(shù)據(jù)類型的變量中。可以將參數(shù)傳遞到另一個數(shù)據(jù)類型中,但是有特定的限制。
2023-03-02 11:09:421414 。 比如: a = 3 變量賦值內(nèi)存變化情況: 運行過程中,解釋器先運行右邊的表達(dá)式,生成一個代表表達(dá)式運算結(jié)果的對象; 然后,將這個對象地址賦值給左邊的變量, 如下圖所示: 如果直接調(diào)用未賦值的變量, 例如 print(a) 則會報如下錯誤: Traceback (mo
2023-03-05 17:11:262153 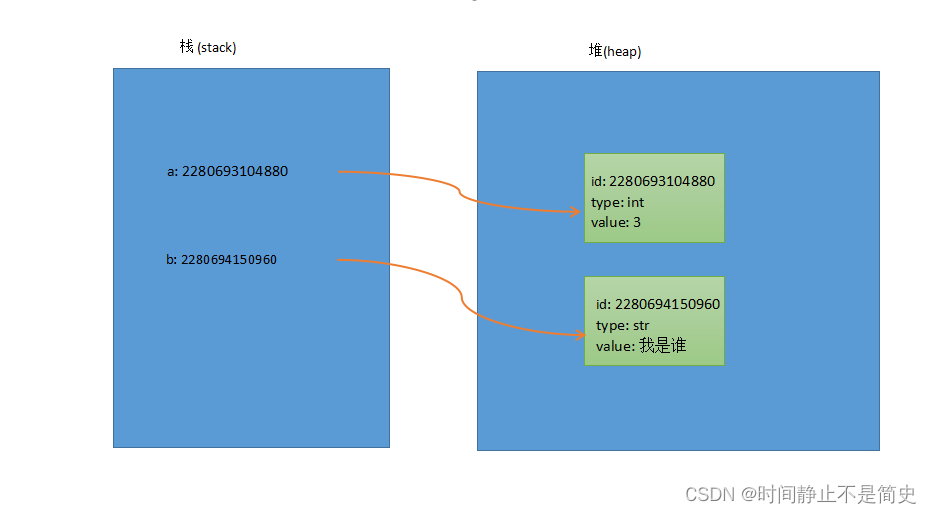
臨時變量在本地屬于邏輯塊,不產(chǎn)生靜態(tài)內(nèi)存區(qū)域,他們位于CPU的堆棧里。本塊正在運行時,其值才被保留。臨時變量不能從聲明它的塊外存取。一個OB、FB或FC首次執(zhí)行前,臨時變量的值是不確定的。也不能被初始化。
2023-03-08 11:14:201791 python不需要事先聲明變量。
python的變量類型是在運行過程中自動決定的,不需要代碼聲明類型。
2023-03-10 10:11:171300 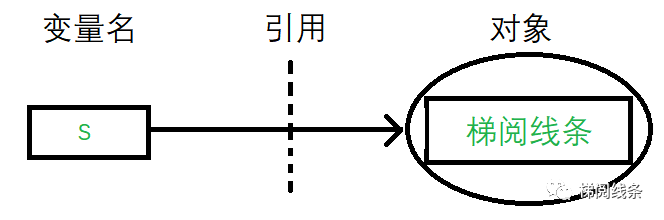
變量包含接下來將在解釋器中執(zhí)行的塊的數(shù)據(jù)。
2023-03-20 10:30:572043 聲明并同時初始化時,每個變量都需要有自己的 DECL 協(xié)議。無法用唯一的 DECL 協(xié)議聲明和初始化多個變量。
2023-03-20 11:18:253517 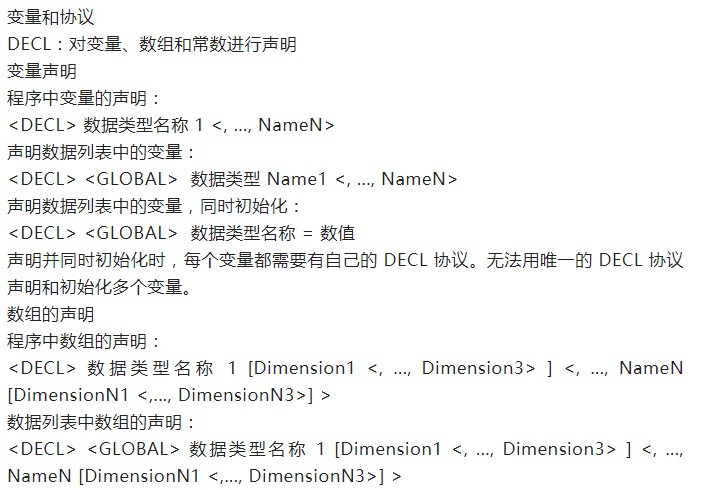
該變量可用于評估當(dāng)前執(zhí)行的程序相對于提前運行。例如,該變量可用于評估程序中的錯誤,以便能夠使用合適的故障服務(wù)功能對其進行響應(yīng)。
2023-03-21 11:20:401522 “ =” 符號和最初的值以常量的形式跟隨變量名。當(dāng)聲明默認(rèn)的設(shè)置,你不能在聲明語句中列出多個變量。一個單獨的聲明語句是任何一個變量被分配默認(rèn)設(shè)置的所必須的。當(dāng)分配默認(rèn)設(shè)置時,關(guān)鍵字DECL 可被忽略。
2023-05-10 11:39:348867 
在 Bash 腳本中,`$0` 是一個特殊變量,它代表當(dāng)前腳本的路徑和名稱。這個變量用于表示腳本自身,它是 Bash 環(huán)境中的一個重要組成部分。`$0` 變量是一個只讀變量,無法更改。
2023-05-12 14:41:082366 如果機器人控制器在Multi-Submit模式下操作(僅適用于KUKA系統(tǒng)軟件8.3及更高版本),則變量無效。多提交模式下機器人控制器的系統(tǒng)狀態(tài)分組在變量$PROG_INFO[]中。
2023-05-15 09:54:112657 使用了KUKA.OfficeSite,或者系統(tǒng)軟件的映像正在辦公電腦上運行。
2023-05-17 16:30:222617 POS_BACK可用于返回到中斷的動作指令的起始位置$POS_BACK對應(yīng)于用于近似窗口內(nèi)的中斷的窗口的開始,并且對應(yīng)于用于在近似窗口之后的中斷的窗的結(jié)束$POS_BACK觸發(fā)KRL程序中的提前運行停止。
2023-05-19 09:37:416833 
為[°] 變量是寫保護的。在機器人程序中,變量觸發(fā)提前運行停止。 ?$POS_ACT_MES 測量的笛卡爾機器人位置 E6POS結(jié)構(gòu)類型的變量定義了TCP相對于BASE坐標(biāo)系的實際位置。 ? X、Y
2023-05-22 14:57:159240 
$PROG_INFO[]將某些系統(tǒng)狀態(tài)組合在一個結(jié)構(gòu)中。 $PROG_INFO[ Interpreter ] = Information Interpreter 類型:INT ? 1:機器人翻譯
2023-05-23 10:15:182262 借助Mulitprog庫KrcExVarLib的功能塊,可以從數(shù)組變量中讀取單個或多個值,也可以將其寫入數(shù)組變量。
2023-05-26 09:27:10908 []="? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? " 等待變量 ,通過不在外部自時進行模擬
2023-05-30 10:44:513687 
:(F331) 吹掃是通過命令“關(guān)閉鉗子”開始的。 變量3:(F332) 吹掃是通過命令“打開鉗子”開始的。 配置是在宏57中完成的。 示例配置在文檔中: “KS_Part_2_2_01_KS26_ROB-KUKA_project-specific_specifications” 2.銑削過程中調(diào)整行程 在開始銑削的基本設(shè)置中提供2個沖
2023-05-31 09:13:342446 
,如果處理的變量確實觸發(fā)了提前運行stop,則間接觸發(fā)提前運行停止。 如果使用CWRITE傳輸使用CAST_TO生成的緩沖區(qū),則C
2023-06-16 16:40:014891 
系統(tǒng)變量的靈活應(yīng)用TSMaster把系統(tǒng)變量作為參數(shù)引入診斷模塊中,極大的拓展了診斷模塊跟其他模塊數(shù)據(jù)交互的能力,本文主要演示具體的操作。A系統(tǒng)變量作為參數(shù)系統(tǒng)變量具有軟件內(nèi)部和外部模塊之間數(shù)據(jù)交互
2022-06-18 10:55:141446 
系統(tǒng)變量本文給大家介紹TSMaster的一個重要概念—系統(tǒng)變量。系統(tǒng)變量可以用于監(jiān)測信號、傳遞信息,還可以用于自動化以及測試等眾多領(lǐng)域,TSMaster幾乎所有的功能都和系統(tǒng)變量有關(guān)。一綜述用戶在
2022-11-09 16:28:013665 1、前言 熟練掌握一門編程語言,最好的方法就是充分了解,掌握基礎(chǔ)知識,并親自體驗,多敲代碼,熟能生巧。本文首先介紹python基礎(chǔ)知識的保留字與標(biāo)識符,然后將介紹在python中如何使用變量以及各種
2023-07-05 15:51:431301 KUKA 機器人的初始化運行稱為 BCO 運行。 BCO 是? B lock coincidence (即程序段重合)的縮寫。重合意為 “ 一致 ” 及 “ 時間 / 空間事件的會合 ”。 在下
2023-07-17 10:42:413158 
用函數(shù) StrCopy() 可以將字符串變量的內(nèi)容復(fù)制到另一個字符串變量中。
2023-07-21 10:04:411833 每類本地變量或參數(shù),都有用各自關(guān)鍵字對標(biāo)識的自己的聲明子域。每個子域包含允許的詳細(xì)的聲明子域,子域可按任何順序定位。
2023-08-17 11:00:13887 該變量可用于評估相對于提前運行的當(dāng)前執(zhí)行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當(dāng)?shù)墓收戏?wù)功能對其進行響應(yīng)。
2023-08-27 09:52:042898 
變量在 TIA Portal 中集中管理。 在程序編輯器中創(chuàng)建 PLC 變量與在 PLC 變量表中創(chuàng)建 PLC 變量沒什么區(qū)別。 如果在程序或 HMI 畫面的多個位置使用某個變量,則對該變量所作的更改會立即在所有編輯器中生效。
2023-10-15 11:31:427350 
指針化是屬于間接尋址的一種類型。使用間接尋址時,應(yīng)首先在運行系統(tǒng)中確定所用變量。定義一個變量列表,而非單個變量。
2023-11-27 11:33:042661 
在Eclipse中設(shè)置Java運行環(huán)境是非常重要的,它能夠確保你的代碼能夠正確地編譯和運行。下面介紹如何設(shè)置Java運行環(huán)境。 下載和安裝JDK:首先,你需要下載并安裝Java
2023-12-06 11:29:012647 配置Java環(huán)境變量是在安裝Java Development Kit(JDK)的過程中的一項重要任務(wù)。環(huán)境變量是為了方便在命令行或腳本中使用Java命令而設(shè)置的。下面,我將詳細(xì)介紹配置Java
2023-12-06 14:02:481475 或者可以通過 WorkVisual 更改密碼。如果在機器人控制系統(tǒng)上安裝了 KUKA.NonAdmin,則只能通過 WorkVisual 更改該密碼。
2023-12-12 17:11:362511 該變量可用于評估相對于提前運行的當(dāng)前執(zhí)行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當(dāng)?shù)墓收戏?wù)功能對其進行響應(yīng)。
2023-12-18 15:41:301705 設(shè)置ROS環(huán)境變量是使用ROS的重要步驟之一。本文將詳細(xì)介紹如何設(shè)置ROS環(huán)境變量,包括什么是環(huán)境變量、為什么要設(shè)置ROS環(huán)境變量、如何設(shè)置ROS環(huán)境變量等。 什么是環(huán)境變量 環(huán)境變量是一種操作系統(tǒng)
2023-12-28 13:52:423707 當(dāng)涉及到將變量存儲在Flash中時,我們通常指的是將變量存儲在STM32微控制器的閃存器件中。在STM32芯片中,閃存用于存儲程序代碼和只讀數(shù)據(jù),但對于一些應(yīng)用情況,我們可以使用閃存來存儲可讀
2023-12-28 15:33:332947 在程序中定義一個變量,那么在程序編譯的過程中,系統(tǒng)會根據(jù)你定義變量的類型來分配「相應(yīng)尺寸」的內(nèi)存空間。那么如果要使用這個變量,只需要用變量名去訪問即可。
2024-01-08 10:14:591288 自動控制系統(tǒng)中的操縱變量指的是在系統(tǒng)中由控制器控制的可調(diào)節(jié)參數(shù),用于調(diào)節(jié)或改變被控對象的輸出或狀態(tài)。操縱變量是自動控制中非常重要的概念,它是控制系統(tǒng)實現(xiàn)自動調(diào)節(jié)和優(yōu)化的核心要素之一。本文將詳細(xì)介紹
2024-01-15 11:29:028441 系統(tǒng)環(huán)境變量是指:在應(yīng)用程序運行期間,終端設(shè)備的系統(tǒng)設(shè)置(例如系統(tǒng)的語言環(huán)境、屏幕方向等)發(fā)生變化。
2024-06-11 21:56:031032 
“ ?文本變量和系統(tǒng)自帶的內(nèi)置變量,可以幫助工程師靈活、高效地配置標(biāo)題欄中的信息,而不用擔(dān)心模板中的文字對象被意外修改。 ? ” 文本變量的語法 文本變量以?${VARIABLENAME}?的方式
2024-11-13 18:21:491230 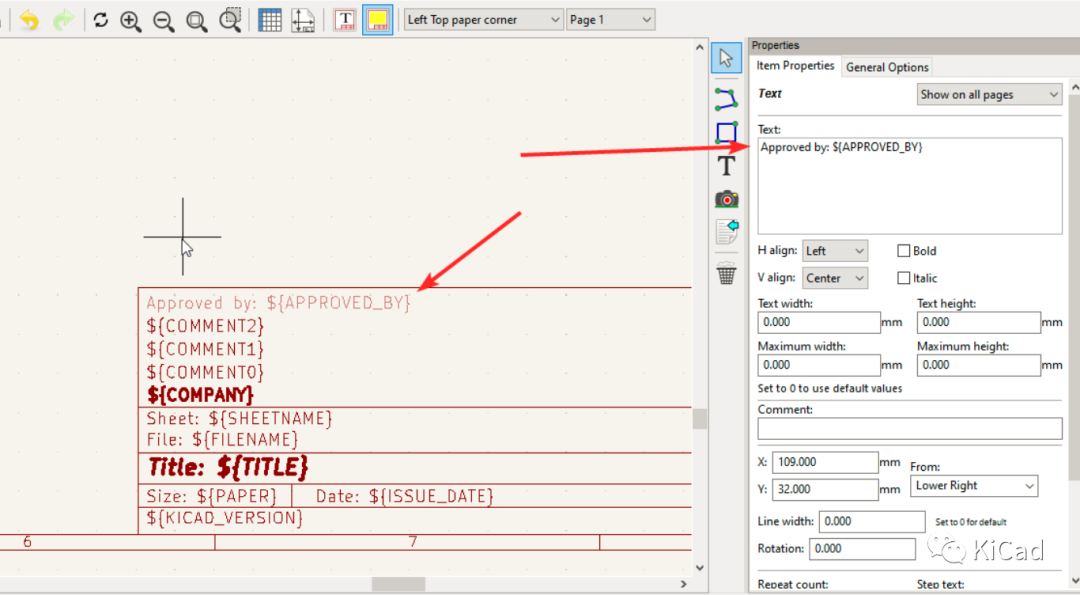
在inventory中定義的連接變量(比如ansible_ssh_user);優(yōu)先級第二。
2025-04-15 10:26:29781
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論