工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,它能自動執(zhí)行工作,是靠自身動力和控制能力來實(shí)現(xiàn)各種功能的一種機(jī)器。它可以接受人類指揮,也可以按照預(yù)先編排的程序運(yùn)行,現(xiàn)代的工業(yè)機(jī)器人還可以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動。
2017-08-07 10:20:59 8467
8467 轉(zhuǎn)子磁鏈,觀測轉(zhuǎn)子磁鏈需要知道電動機(jī)轉(zhuǎn)子電阻和電感。因此,直接轉(zhuǎn)矩控制大大減小了矢量控制技術(shù)中控制性能易受參數(shù)變化影響的問題。網(wǎng)在本文介紹了四種不同變頻控制方式的原理和特點(diǎn),儀表從業(yè)人員也應(yīng)該對此有所了解,對提升自動化過程控制中的變頻應(yīng)用技能大有幫助。
2021-04-06 09:14:11
工業(yè)機(jī)器人控制器功能多任務(wù)功能一臺機(jī)器人可進(jìn)行多個(gè)任務(wù)的操作;
2019-09-12 09:10:22
工業(yè)機(jī)器人的控制系統(tǒng)的主要任務(wù)是控制工業(yè)機(jī)器人在工作空間中的運(yùn)動位置、姿態(tài)和軌跡、操作順序及動作的時(shí)間等項(xiàng)目,主要功能有示教再現(xiàn)功能和運(yùn)動控制功能。示教再現(xiàn)控制的主要內(nèi)容主要包括示教及記憶方式和示教
2017-10-20 10:03:57
最近在看工業(yè)機(jī)器人的資料,想知道現(xiàn)在的一些市面上的工業(yè)機(jī)器人上用的控制控制系統(tǒng)都有哪些廠商呀?
2015-01-23 12:04:01
ZNAI-1工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺一、產(chǎn)品概述工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)訓(xùn)平臺以工業(yè)機(jī)器人與機(jī)器視覺為核心,將機(jī)械、氣動、運(yùn)動控制、變頻調(diào)速、編碼器技術(shù)、PLC控制技術(shù)有機(jī)地進(jìn)行
2021-07-01 11:48:31
、抓取、裝配、入庫等訓(xùn)練,2、工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺包含六自由度工業(yè)機(jī)器人、智能視覺檢測系統(tǒng)、PLC控制系
2021-07-01 06:38:35
,企業(yè)招人困難。工業(yè)機(jī)器人與成形機(jī)床集成,不僅可以解決企業(yè)用人問題,同時(shí)也能提高加工效率和安全性,提升加工精度,具有很大的發(fā)展空間。 數(shù)控折彎機(jī)集成應(yīng)用 機(jī)器人折彎集成應(yīng)用主要有兩種方式
2015-12-04 15:01:08
剛開始接觸機(jī)器人的時(shí)候,我在師兄的機(jī)器人代碼里死活找不到有關(guān)控制計(jì)算的函數(shù),作為常年和控制框圖打交道的我,很是疑惑控制回路去哪里了?因此本文介紹一下工業(yè)機(jī)器人中的控制問題。參考華科賀磊博士的觀點(diǎn)
2021-06-28 09:29:31
構(gòu); 7.滾珠絲杠機(jī)構(gòu); 8.金屬帶/齒形減速機(jī)構(gòu); 9.球減速機(jī)構(gòu)。 工業(yè)機(jī)器人電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個(gè)閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。目前國外許多電動機(jī)生產(chǎn)廠家均開發(fā)出與交流伺服電動機(jī)相
2015-01-23 14:33:53
(1)氣動式工業(yè)機(jī)器人這類工業(yè)機(jī)器人以壓縮空氣來驅(qū)動操作機(jī),其優(yōu)點(diǎn)是空氣來源方便,動作迅速,結(jié)構(gòu)簡單造價(jià)低,無污染,缺點(diǎn)是空氣具有可壓縮性,導(dǎo)致工作速度的穩(wěn)定性較差,又因氣源壓力一般只有6kPa左右
2017-12-01 10:47:32
`工業(yè)機(jī)器人的核心部件包括機(jī)器人本體、減速器、伺服電機(jī)、控制系統(tǒng)等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際機(jī)器人展覽會上了解到,目前新時(shí)達(dá)(002527
2015-02-12 10:17:59
工業(yè)機(jī)器人的產(chǎn)業(yè)鏈分為上游核心零部件,中游本體和傳感器等生產(chǎn),以及下游的系統(tǒng)集成等。核心零部件是減速機(jī)、伺服系統(tǒng)、控制系統(tǒng)三部分,分別對應(yīng)執(zhí)行系統(tǒng)、驅(qū)動系統(tǒng)、控制系統(tǒng),分別占成本的35%、25
2017-08-23 15:10:27
機(jī)器人技術(shù)是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機(jī)器人應(yīng)用情況,是一個(gè)國家工業(yè)自動化水平的重要標(biāo)志。
2020-03-27 09:03:30
工業(yè)機(jī)器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動系統(tǒng)、測量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機(jī)器人的典型結(jié)構(gòu)。機(jī)器人手臂具有3個(gè)自由度(運(yùn)動坐標(biāo)軸),機(jī)器人作業(yè)空間由手臂運(yùn)動范圍決定。手腕是機(jī)器人
2015-01-19 10:36:12
`<span style="" >工業(yè)機(jī)器人的技術(shù)原理機(jī)器人是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而
2018-11-23 10:40:38
為了追求纖細(xì)緊湊的外表,采用了將4、5、6三軸電機(jī)內(nèi)置在小臂內(nèi)部的方式。其實(shí)就傳統(tǒng)工業(yè)機(jī)器人來講,各家主要的差別在于5軸和6軸的布置方式,外資品牌借助于深厚的設(shè)計(jì)功底和強(qiáng)大的定制能力,普遍采用齒輪或者
2018-11-01 11:08:12
關(guān)于ros智能機(jī)器人,就是一個(gè)寫智能機(jī)器人代碼的一個(gè)虛擬機(jī),
2021-10-13 19:20:16
智能小車機(jī)器人控制端V2.02
2015-04-12 13:04:30
掃地機(jī)器人工作。二 智能掃地機(jī)器人控制方案簡介1. 方案概述智能掃地機(jī)器人控制方案實(shí)現(xiàn)方式是用戶可以通過智能手機(jī)微信綁定掃地機(jī)器人,無論用戶在何時(shí)何地,都可以利用遠(yuǎn)程控制,對掃地機(jī)器人進(jìn)行監(jiān)控和操作
2017-05-27 13:31:20
智能監(jiān)控機(jī)器人是近年來機(jī)器人應(yīng)用工程中一項(xiàng)前沿性的題目,智能化探測小車是智能行走機(jī)器人的一種。智能監(jiān)控機(jī)器小車就是針對上述情況,在參考了目前大多數(shù)智能機(jī)器人的基礎(chǔ)上,以降低成本為原則設(shè)計(jì)的。小車具備
2019-10-14 07:37:52
` 本帖最后由 星希望532 于 2015-12-2 20:06 編輯
作品名稱:基于微型操作系統(tǒng)的智能多平臺控制語音機(jī)器人http://v.youku.com/v_show
2015-12-02 19:08:42
PID控制的優(yōu)點(diǎn)有哪些?機(jī)器人控制技術(shù)有哪些重要性?
2021-06-18 08:02:56
1、機(jī)器人的控制系統(tǒng)“控制”的目的是使被控對象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實(shí)質(zhì)”是對驅(qū)動器輸出力矩的控制。2、機(jī)器人示教原理機(jī)器人的基本工作原理是示教
2021-09-13 08:40:55
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
第二章 機(jī)器人系統(tǒng)與控制需求簡介2.1 工業(yè)機(jī)器人的系統(tǒng)組成機(jī)械本體:精密減速機(jī)、伺服電機(jī)、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機(jī)器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機(jī)器人運(yùn)動控制技術(shù),盡管運(yùn)動控制器需求增長迅速,但即便到明年,整體市場規(guī)模仍不到 10 億元。高性能工業(yè)機(jī)器人作為核心裝備,一直被國外品牌壟斷,而運(yùn)動控制器的自主可控一直是國產(chǎn)機(jī)器人領(lǐng)域的一大痛點(diǎn)
2021-07-28 07:33:29
有什么辦法可以實(shí)現(xiàn),不通過電的方式,控制BB8機(jī)器人內(nèi)部電路的通斷?從而控制電源的開關(guān)?也就是說怎么控制一個(gè)密閉容器內(nèi)電路的通斷?
2017-04-30 15:10:27
LPC2106在足球機(jī)器人控制中的應(yīng)用設(shè)計(jì)足球機(jī)器人融合了計(jì)算機(jī)視覺、模式識別、決策對策、自動控制、無線通信、多智能體合作等多項(xiàng)摘要 技術(shù),具有極高的研究價(jià)值。本文設(shè)計(jì)了基于A R M 7微處理器
2009-03-28 14:03:25
LabVIEW開發(fā)六軸工業(yè)機(jī)器人運(yùn)動控制系統(tǒng)
本項(xiàng)目開發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核心角色
2023-12-21 20:03:18
性價(jià)比和本地化服務(wù)方面甚至更有優(yōu)勢,國產(chǎn)MCU作為機(jī)器人控制芯片的市場發(fā)展空間巨大。 機(jī)器人在位置、速度、動作順序等控制方式上更加復(fù)雜、精細(xì)和智能化,這對機(jī)器人控制器的功能、性能和接口提出了新的挑戰(zhàn),高性能
2023-02-16 14:11:04
自動或半自動機(jī)器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺,以滿足復(fù)雜系統(tǒng)的需求。從尖端的機(jī)器人研究項(xiàng)目直至高級行業(yè)應(yīng)用,NI平臺被證實(shí)是高效的機(jī)器人解決方案。
2019-11-06 07:50:49
,并進(jìn)行控制。 工業(yè)機(jī)器人按臂部的運(yùn)動形式分為四種。直角坐標(biāo)型的臂部可沿三個(gè)直角坐標(biāo)移動;圓柱坐標(biāo)型的臂部可作升降、回轉(zhuǎn)和伸縮動作;球坐標(biāo)型的臂部能回轉(zhuǎn)、俯仰和伸縮;關(guān)節(jié)型的臂部有多個(gè)轉(zhuǎn)動關(guān)節(jié)。工業(yè)機(jī)器人的基礎(chǔ)知識
2010-05-18 22:03:02
申請理由:此開發(fā)板擁有足夠的硬件資源來完成機(jī)器人數(shù)據(jù)的實(shí)時(shí)和快速的處理。項(xiàng)目描述:利用物聯(lián)網(wǎng)和嵌入式的的方式去連接和控制機(jī)器人,能夠控制機(jī)器人的動作,實(shí)時(shí)查看機(jī)器人的數(shù)據(jù)。
2015-12-02 16:09:22
申請理由:采用DSP作為控制器,控制六軸工業(yè)機(jī)器人機(jī)械臂的運(yùn)動。項(xiàng)目描述:本人研究生二年級,往算法控制方向進(jìn)行研究。我的計(jì)劃是首先學(xué)習(xí)DSP,因此很是想擁有一個(gè)屬于自己的DSP開發(fā)板,也計(jì)劃著手用此
2015-09-10 11:15:16
更多經(jīng)驗(yàn);計(jì)劃將其實(shí)現(xiàn)成智能化多功能平臺,例如用WiFi控制,使其更加智能簡便操控項(xiàng)目描述:mBot教育機(jī)器人是一個(gè)可編程的機(jī)器小車,它以鋁合金框架為基礎(chǔ),通過兩個(gè)輪子控制前進(jìn)方向和轉(zhuǎn)彎。mBot機(jī)器人
2015-11-30 15:53:55
的局限性以及衡量大模型的關(guān)鍵指標(biāo)。閱讀了該部分后,我感受到了一種前所未有的震撼,這種震撼不僅來源于技術(shù)本身的先進(jìn)性,更來源于它對傳統(tǒng)機(jī)器人控制方式的顛覆。
傳統(tǒng)機(jī)器人的局限性與大模型的變革
傳統(tǒng)的機(jī)器人控制
2024-12-29 23:04:07
機(jī)器人按臂部的運(yùn)動形式分為四種。直角坐標(biāo)型的臂部可沿三個(gè)直角坐標(biāo)移動;圓柱坐標(biāo)型的臂部可作升降、回轉(zhuǎn)和伸縮動作;球坐標(biāo)型的臂部能回轉(zhuǎn)、俯仰和伸縮;關(guān)節(jié)型的臂部有多個(gè)轉(zhuǎn)動關(guān)節(jié)。工業(yè)機(jī)器人按執(zhí)行機(jī)構(gòu)運(yùn)動
2015-01-19 10:58:38
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
清潔機(jī)器人是服務(wù)機(jī)器人的一種,所謂服務(wù)機(jī)器人是指自主或半自主的、從事非生產(chǎn)活動、能完成有益于人類健康的服務(wù)工作的機(jī)器人。家庭清潔機(jī)器人集機(jī)械、電子、傳感器、計(jì)算機(jī)、控制、機(jī)器入技術(shù)、人工智能等諸多
2019-09-05 06:56:37
龍人四足機(jī)器人是一種仿生機(jī)器人,由Openduino控制板控制,有四條腿,每條腿兩個(gè)自由度,由兩個(gè)舵機(jī)驅(qū)動,能實(shí)現(xiàn)兩種步態(tài)行走。配有三個(gè)超聲波,實(shí)現(xiàn)大角度智能避障。標(biāo)準(zhǔn)演示程序有5個(gè)可愛的表演動作。重要技術(shù)點(diǎn): 四足機(jī)器人的行走步態(tài)設(shè)計(jì)、舵機(jī)的梯形速度控制、多路舵機(jī)的協(xié)調(diào)控制
2016-03-24 16:17:53
,運(yùn)動學(xué)部分從坐標(biāo)變換人手,介紹了正向運(yùn)動學(xué)方程的建立、逆向運(yùn)動學(xué)的求解以及機(jī)器人的微分運(yùn)動等內(nèi)容。控制結(jié)構(gòu)篇著重介紹機(jī)器人的傳感技術(shù)、位置控制和力控制。針對機(jī)器人控制領(lǐng)域的研究動態(tài)和主要研究方向,先進(jìn)控制篇介紹了傳感信息融合、視覺控制、協(xié)調(diào)控制、移動機(jī)器人技術(shù)、智能控制方法等。
2017-09-19 15:30:57
以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動。6軸工業(yè)機(jī)器人的全部控制由一臺微型計(jì)算機(jī)完成。另一種是分散式控制,即采用多臺微機(jī)來分擔(dān)機(jī)器人的控制,如當(dāng)采用上、下兩級微機(jī)共同完成機(jī)器人的控制時(shí),主機(jī)常用于負(fù)責(zé)
2017-08-09 16:30:09
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人是怎樣進(jìn)行劃分的?
2021-10-11 09:10:17
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
labview可不可直接編程控制EPSON機(jī)器人(型號:LS3-401S),如果可以應(yīng)用哪種通訊方式(如:RS232、以太網(wǎng)等)。坐等大神指導(dǎo)
2015-06-04 20:23:10
控制器GYXF3100-4XP。關(guān)于它們的啟動方式,主要有四種:直接啟動、星三角啟動、自耦降壓啟動、軟啟動。那么,關(guān)于這四種啟動方式,你知道多少呢?哪種啟動方式呢?哪種啟動方式比較經(jīng)濟(jì)實(shí)惠呢?哪種啟動
2021-09-13 08:34:04
機(jī)器人是先進(jìn)的機(jī)電一體化數(shù)字化裝備,集機(jī)械、電子、控制、計(jì)算機(jī)、傳感器、人工智能等多學(xué)科高新技術(shù)于一體,技術(shù)附加值很高。對提高產(chǎn)品的質(zhì)量與產(chǎn)量、保障人身安全,改善勞動環(huán)境,減輕勞動強(qiáng)度,提高勞動生產(chǎn)率
2015-09-02 14:03:18
導(dǎo)航是移動機(jī)器人一種導(dǎo)航方式,并且基本視覺導(dǎo)航的研究是未來移動機(jī)器人導(dǎo)航的主要發(fā)展方向之一。該視覺子系統(tǒng)在整個(gè)系統(tǒng)中的作用是將攝像頭采集周圍環(huán)境的視覺信息進(jìn)行圖像理解,并根據(jù)圖像處理算法控制機(jī)器人運(yùn)動
2019-07-04 08:30:00
一。引言 機(jī)器人研究是自動化領(lǐng)域最復(fù)雜。最具挑戰(zhàn)性的課題,它集機(jī)械。電子。計(jì)算機(jī)。材料。傳感器。控制技術(shù)等多門學(xué)科于一體,是多學(xué)科高技術(shù)成果的集中體現(xiàn)。而仿人步行機(jī)器人技術(shù)的研究更是處于機(jī)器人課題
2020-08-19 06:57:09
工業(yè)生產(chǎn)中,傳統(tǒng)的工業(yè)機(jī)器人在生產(chǎn)適用性上已經(jīng)不能滿足日益增長的多任務(wù)需求,多軸機(jī)器人順勢發(fā)展,趨勢明顯。多軸機(jī)器人是能夠?qū)崿F(xiàn)自動控制的、可重復(fù)編程的、多自由度的、運(yùn)動自由度建成空間直角關(guān)系
2020-07-29 06:57:04
隨著科學(xué)技術(shù)的發(fā)展與勞動力成本逐年上升,未來世界的工業(yè)發(fā)展中,“機(jī)器人換人”將成為一種趨勢。在未來世界的工業(yè),我們可以想像,在車間里,都沒有人,完全都是由機(jī)器人進(jìn)行全自動化生產(chǎn),機(jī)器人將代替取代人,而人只要負(fù)責(zé)監(jiān)控與控制。大家如何看待工業(yè)機(jī)器人代替人?
2016-01-21 18:51:08
樹莓派和其他機(jī)器人的控制器有何不同?如何使用樹莓派開發(fā)智能機(jī)器人控制系統(tǒng)?
2021-12-23 06:55:02
1 引言隨著人口老齡化進(jìn)程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)。該服務(wù)機(jī)器人的控制系統(tǒng)是機(jī)器人的神經(jīng)中樞,因而
2019-07-30 07:02:31
各位大神,現(xiàn)在小弟想用LabVIEW控制安川機(jī)器人,可是通過調(diào)用motocom32的DLL不能和機(jī)器人通信,聽說LabVIEW不能二次開發(fā)安川機(jī)器人,請問有熟悉安川機(jī)器人的高手指點(diǎn)一二,不勝感激!
2014-11-10 12:29:06
席文姣,陳帝伊,馬孝義(西北農(nóng)林科技大學(xué) 水利與建筑工程學(xué)院,陜西 西安712100)0引言如何設(shè)計(jì)智能滅火機(jī)器人控制器?控制器是智能機(jī)器人處理和控制信息的主體,它直接決定了機(jī)器人的行為和性能
2019-07-31 06:23:18
我有一個(gè)連接到 arduino uno 的 ESP8266 模塊和一個(gè)通過 WiFi 連接到 ESP8266 的智能手機(jī)。我正在嘗試從 IP(Internet 協(xié)議)讀取數(shù)據(jù),我需要通過 IP 命令控制機(jī)器人。我怎么能做到呢?有人有 arduino 示例或關(guān)于它的文章嗎?
2023-02-28 08:23:17
操作和控制。隨著機(jī)器人的智能化水平越來越高,控制器要有方便、靈活的操作方式,以及多種形式的控制方式和高度可靠性,還要有很高的實(shí)時(shí)性。
2020-03-06 07:07:07
隨著人口老齡化進(jìn)程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)。該服務(wù)機(jī)器人的控制系統(tǒng)是機(jī)器人的神經(jīng)中樞,因而其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級分布式結(jié)構(gòu)。
2019-10-15 08:03:16
庫卡KUKA機(jī)器人四種啟動方式1)自動運(yùn)行說明 庫卡機(jī)器人處于自動運(yùn)行時(shí),先要在手動狀態(tài)時(shí)候選擇需要運(yùn)行的程序,然后通過鑰匙開關(guān)切換機(jī)器人到自動運(yùn)行狀態(tài),給機(jī)器人上電,然后啟動機(jī)器人運(yùn)行程序,讓
2020-09-04 15:45:41
怎么實(shí)現(xiàn)對機(jī)甲大師機(jī)器人的控制?
2021-11-19 06:33:45
怎樣為機(jī)器人控制器與變頻器等工業(yè)設(shè)備進(jìn)行通訊接口的升級呢?
2021-12-23 08:00:47
無線充電的起因無線充電的“歷史”無線充電的四種方式及比較無線充電系統(tǒng)的元件和開發(fā)工具推薦
2021-01-27 07:06:05
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
推薦使用FET3568J-C工業(yè)級核心板作為機(jī)器人控制器的主控平臺。01-高性能處理器飛凌嵌入式FET3568J-C核心板基于瑞芯微RK3568J工業(yè)級處理器設(shè)計(jì)開發(fā),四核64位Cortex-A55架構(gòu)主頻高達(dá)1.8GHz
2023-02-17 16:03:26
深圳市海西機(jī)器人有限公司是一家集研發(fā)、生產(chǎn)、銷售于一體的高科技新能源公司,公司主打研發(fā)運(yùn)動控制、AI、通訊模塊等智能化設(shè)備。 海西機(jī)器人專注于為工業(yè)機(jī)器臂、機(jī)器人公司提供專業(yè)的應(yīng)用集成模塊,為企業(yè)
2018-08-07 09:03:07
機(jī)器人發(fā)出信號,機(jī)器人隨即通過設(shè)定的方式進(jìn)行報(bào)警。下圖是兩款國外生產(chǎn)的機(jī)器人,最主要的特點(diǎn)是可以運(yùn)動,屬于智能玩具的范疇。它們都是可以連接智能手機(jī),通過手機(jī)對機(jī)器人進(jìn)行設(shè)置,然后把手機(jī)當(dāng)做機(jī)器人的操作
2017-06-09 17:18:49
嵌入式推薦使用FET3568J-C工業(yè)級核心板作為機(jī)器人控制器的主控平臺。 01 高性能處理器 飛凌嵌入式FET3568J-C核心板基于瑞芯微RK3568J工業(yè)級處理器設(shè)計(jì)開發(fā),四核64位
2023-02-24 17:05:21
一、背景:機(jī)器人邁向“微米級控制時(shí)代”
隨著智能制造和自動化產(chǎn)業(yè)的持續(xù)升級,工業(yè)機(jī)器人不再僅僅承擔(dān)重復(fù)搬運(yùn),而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務(wù)。
在這些“高精度機(jī)器人
2025-11-14 15:48:29
以IPC+DSP 作為六軸工業(yè)機(jī)器人的控制器, 設(shè)計(jì)了一種基于可編程多軸控制器PMAC(Programmable Multi-Axis Controller)的開放式機(jī)器人控制系統(tǒng)。系統(tǒng)采用雙微機(jī)分級控制方式和模塊化結(jié)構(gòu)軟
2009-09-25 16:54:13 39
39 頒布了功能表圖的國家標(biāo)準(zhǔn)(gb6988.6-86)。有了功能表圖后,可以用四種方式編制梯形圖,它們分別是:起保停編程方式、步進(jìn)梯形指令編程方式、移位寄存器編程方式和置位復(fù)位編程方式。本文以三菱公司f1系列plc為例,說明實(shí)現(xiàn)順序控制的四種編程方式。
2019-04-01 08:41:389212 
工業(yè)機(jī)器人的控制方式目前市場上使用最多的機(jī)器人當(dāng)屬工業(yè)機(jī)器人,也是最成熟完善的一種機(jī)器人,而工業(yè)機(jī)器人能得到廣泛應(yīng)用。
2019-06-18 15:10:594497 工業(yè)機(jī)器人的控制方式目前市場上使用最多的機(jī)器人當(dāng)屬工業(yè)機(jī)器人,也是最成熟完善的一種機(jī)器人,而工業(yè)機(jī)器人能得到廣泛應(yīng)用,得益于它擁有有多種控制方式,按作業(yè)任務(wù)的不同,可主要分為點(diǎn)位控制方式、連續(xù)軌跡控制方式、力(力矩)控制方式和智能控制方式四種控制方式。
2019-07-08 09:34:366879 工業(yè)機(jī)器人是一個(gè)復(fù)雜的集成系統(tǒng),機(jī)器人本體就是它的身體,眼睛就是它的視覺系統(tǒng)等等,今天我們來說一下,工業(yè)機(jī)器人的“大腦”——控制器。機(jī)器人的控制系統(tǒng)就是機(jī)器人的核心,工業(yè)機(jī)器人在工作時(shí)離不來控制系統(tǒng)的指揮。
2019-09-30 11:32:144296 點(diǎn)位控制方式(ptp):這種控制方式的特點(diǎn)是只控制工業(yè)機(jī)器人末端操作器在作業(yè)空間中某些規(guī)定的離散點(diǎn)上的位姿。控制時(shí)只要求工業(yè)機(jī)器人快速、準(zhǔn)確地實(shí)現(xiàn)相鄰各點(diǎn)之間的運(yùn)動,而對達(dá)到目標(biāo)點(diǎn)的運(yùn)動軌跡則不作任何規(guī)定,這種控制方式的主要技術(shù)指標(biāo)是定位精度和運(yùn)動所需的時(shí)間。
2019-10-12 11:28:4114285 機(jī)器人控制器是根據(jù)指令以及傳感信息控制機(jī)器人完成一定的動作或作業(yè)任務(wù)的裝置,它是機(jī)器人的心臟,決定了機(jī)器人性能的優(yōu)劣,從機(jī)器人控制算法的處理方式來看,可分為串行、并行兩種結(jié)構(gòu)類型。
2019-10-14 14:39:1412907 機(jī)器人的控制系統(tǒng),就相當(dāng)于人體的大腦,是機(jī)器人的核心組成部分。關(guān)于機(jī)器人的控制系統(tǒng)有哪些分類呢?機(jī)器人控制系統(tǒng)按其控制方式可分集中控制系統(tǒng)、主從控制系統(tǒng)及分散控制系統(tǒng),下面為大家詳細(xì)講講這些系統(tǒng)。
2019-11-04 08:45:3328264 消防泵一用一備星三角控制器GYXF360-2XP啟動方式主要有四種:直接啟動、星三角、自耦降壓、軟啟動、。接下來,智能消防電氣控制器廠家國耀電子傾心為您科普:消防泵控制器GYXF360-2XP四種啟動方式的優(yōu)缺點(diǎn)。
2019-12-13 09:33:138293 工業(yè)機(jī)器人的應(yīng)用逐漸增多,主要原因在于工業(yè)機(jī)器人具備諸多優(yōu)勢。對于工業(yè)機(jī)器人,工業(yè)相關(guān)人員必定有所了解。但就普通人而言,工業(yè)機(jī)器人距離我們的生活卻有一定距離。為增加大家對工業(yè)機(jī)器人的認(rèn)識,本文將對工業(yè)機(jī)器人的4大控制方式加以介紹。
2020-07-14 10:51:322467 目前,市場上應(yīng)用最廣泛的機(jī)器人是工業(yè)機(jī)器人,也是最成熟、最完善的一種。工業(yè)機(jī)器人的應(yīng)用十分廣泛,因?yàn)樗卸喾N控制方法。根據(jù)不同的任務(wù),可以分為四種控制方法:點(diǎn)控制法、連續(xù)軌跡控制法、力控制法和智能控制法。
2020-07-30 16:24:5111877 機(jī)器人控制器作為工業(yè)機(jī)器人最為核心的零部件之一,對機(jī)器人的性能起著決定性的影響,在一定程度上影響著機(jī)器人的發(fā)展。
2020-08-18 16:13:487827 大家知道現(xiàn)在企業(yè)的生產(chǎn)效率為什么這么高嗎?是因?yàn)槟壳捌髽I(yè)都使用工業(yè)機(jī)器人進(jìn)行生產(chǎn),工業(yè)機(jī)器人可以連續(xù)不間斷的生產(chǎn),所以生產(chǎn)效率才會這么高。工業(yè)機(jī)器人是怎樣生產(chǎn)的呢?它有一個(gè)控制系統(tǒng),現(xiàn)在來看一下工業(yè)機(jī)器人控制系統(tǒng)有哪幾種控制方式。
2021-05-18 15:38:409631 圍繞變頻器的四種控制方式即V/f恒定控制、轉(zhuǎn)差頻率控制、矢量控制、直接轉(zhuǎn)矩控制展開介紹。
2022-03-11 11:20:1713745 
這種控制方式只對工業(yè)機(jī)器人末端執(zhí)行器在作業(yè)空間中某些規(guī)定的離散點(diǎn)上的位姿進(jìn)行控制。在控制時(shí),只要求工業(yè)機(jī)器人能夠快速、準(zhǔn)確地在相鄰各點(diǎn)之間運(yùn)動,對達(dá)到目標(biāo)點(diǎn)的運(yùn)動軌跡則不作任何規(guī)定。
2022-08-11 11:43:142530 四種方式實(shí)現(xiàn)led點(diǎn)亮
2023-01-04 14:31:164 設(shè)備管理的主要任務(wù)之一是控制設(shè)備和內(nèi)存或處理機(jī)之間的數(shù)據(jù)傳送,外圍設(shè)備和內(nèi)存之間的輸入/輸出控制方式有四種,下面分別介紹。
2023-12-08 14:05:582127 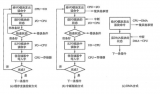
伺服電機(jī)的三種控制方式 如何確定選擇伺服電機(jī)控制方式? 伺服電機(jī)是一種能夠根據(jù)輸入信號實(shí)時(shí)調(diào)整轉(zhuǎn)速和位置的電動機(jī)。它通常用于需要高精度、高效率、高可靠性的工業(yè)領(lǐng)域,如機(jī)床、機(jī)器人、印刷設(shè)備等。伺服
2023-12-26 14:02:192676 工業(yè)機(jī)器人控制系統(tǒng)是工業(yè)機(jī)器人的核心組成部分,它負(fù)責(zé)接收輸入信號、處理信息、控制機(jī)器人的運(yùn)動和執(zhí)行任務(wù)。隨著工業(yè)自動化和智能制造的快速發(fā)展,工業(yè)機(jī)器人控制系統(tǒng)的重要性日益凸顯。本文將詳細(xì)介紹工業(yè)
2024-06-16 15:38:043215 。 開環(huán)控制 : 定義 :開環(huán)控制是一種沒有反饋機(jī)制的控制方式,控制器根據(jù)預(yù)設(shè)的指令直接驅(qū)動機(jī)器人執(zhí)行動作。 特點(diǎn) :簡單、成本低,但無法自動補(bǔ)償外部干擾和系統(tǒng)誤差。 應(yīng)用 :適用于對精度要求不高或干擾較小的應(yīng)用場景。 閉
2024-09-04 09:16:281542 工業(yè)機(jī)器人的編程是確保機(jī)器人能夠執(zhí)行特定任務(wù)的關(guān)鍵步驟。編程方式多種多樣,每種方式都有其特定的應(yīng)用場景和優(yōu)勢。 工業(yè)機(jī)器人編程概述 工業(yè)機(jī)器人編程是為機(jī)器人設(shè)計(jì)和創(chuàng)建指令序列的過程,這些指令指導(dǎo)
2024-09-04 09:26:173770 景,下面將介紹這四種控制方式。 一、點(diǎn)位控制方式(PTP) 點(diǎn)位控制方式是工業(yè)機(jī)器人最基本的控制方式之一。這種控制方式的特點(diǎn)是只控制工業(yè)機(jī)器人末端執(zhí)行器在作業(yè)空間中某些規(guī)定的離散點(diǎn)上的位姿。控制時(shí)只要求工業(yè)機(jī)器人快速
2024-09-04 09:31:053482 ? 四足機(jī)器人憑借其獨(dú)特的地面接觸方式和對復(fù)雜地形的出色適應(yīng)能力,已成為自動化與機(jī)器人工程技術(shù)研究的焦點(diǎn)。近年來,在結(jié)構(gòu)設(shè)計(jì)、運(yùn)動規(guī)劃和平衡控制等關(guān)鍵方面,四足機(jī)器人已取得重要進(jìn)展。然而,如何進(jìn)
2025-01-20 10:15:284070 
方式和智能控制方式四種,這幾種控制方式的功能要點(diǎn)有哪些。 智慧倉儲物流 01 點(diǎn)位控制方式(PTP) 這種控制方式只對工業(yè)機(jī)器人末端執(zhí)行器在作業(yè)空間中某些規(guī)定的離散點(diǎn)上的位姿進(jìn)行控制。在控制時(shí),只要求工業(yè)機(jī)器人能夠快
2025-03-13 10:11:421531 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論