交通燈控制系統 畢業設計,求破。求程序和仿真
2016-04-07 01:28:54
`交通燈控制系統模擬設計一、實驗目的設計一個交通信號燈模擬控制系統,使其能模擬城市“十字”路***通信號燈的功能,并能進行某些特殊控制。二、實驗內容與步驟1、在十字路口上,交通信號燈的變化是固定
2015-06-06 22:05:23
模糊系統建模應用-自適應模糊控制.zip
2018-01-07 12:16:28
第1章 概述 1.1 人工神經網絡研究與發展 1.2 生物神經元 1.3 人工神經網絡的構成 第2章人工神經網絡基本模型 2.1 MP模型 2.2 感知器模型 2.3 自適應線性
2012-03-20 11:32:43
AVR單片機——交通燈控制系統(程序+原理圖)
2012-08-17 16:13:15
針對傳統比例積分(PI)控制在電機控制中控制效果不良的問題,設計了一種基于向后傳播算法(BP)模糊神經網絡的PI控制器。基于MATLAB/Simulink建立了純電動汽車驅動系統的仿真模型,將駕駛員
2019-12-10 16:32:40
為了解決城市交通擁擠的問題,需要從供求兩個方面來采取措施:一是加強城市道路的基礎建設,二是要充分利用、提高現有路網的利用效率。目前,國內的城市交通燈大多數都是采用固定的綠信比(一個信號相位的有效綠燈
2019-09-03 08:01:18
分享一款不粗的一種基于CPLD的交通燈控制系統設計
2021-05-07 06:51:29
單片機模擬交通燈控制系統設計
2012-08-17 15:21:54
基于51單片機的交通燈控制系統設計,單片機自主學習項目*設計分析 —模擬LED交通燈**一、開發背景與需求1 開發背景交通事業蓬勃發展,交通流量年年增長,道路交通繁忙,經常有嚴重堵車現象,特別是在
2021-07-15 06:16:30
基于模糊系統逼近的自適應控制.doc
2017-09-24 11:30:36
神經網絡可以建立參數Kp,Ki,Kd自整定的PID控制器。基于BP神經網絡的PID控制系統結構框圖如下圖所示:控制器由兩部分組成:經典增量式PID控制器;BP神經網絡...
2021-09-07 07:43:47
本帖最后由 eehome 于 2013-1-5 09:45 編輯
基于FPGA技術的交通燈控制系統設計
2012-08-19 23:19:17
由于時變非線性和強耦合的控制系統還沒有精確的數學模型,因而傳統的依賴被控對象數學模型的控制策略及其控制系統的封閉式結構很難對其實施有效控制。神經網絡控制能夠很好地克服系統中模型參數的變化和非線性等
2019-08-12 06:25:35
模糊自適應PID控制原理及結構是什么?如何去設計恒溫箱溫度控制系統硬件電路?
2021-05-07 07:05:16
控制系統的計算機仿真數學模型。設計了系統速度環的模糊PID控制器,仿真結果表明。與傳統PID控制相比,自適應PD控制的BLICM系統具有更高的稱定性和控制精度、更快的動態響應速度。
純分享帖,點擊下方
2025-07-09 14:18:57
時間進行自適應性調整,造成了道路資源的浪費。本文設計了一種基于無線傳感器網絡的自適應交通燈控制系統,利用安裝在各車道上的攜帶超聲波收發模塊的傳感器節點探測車流量,流量信息通過無線通信方式匯聚到集中控制
2018-11-08 16:19:27
基于51單片機的智能交通燈控制系統仿真,含有程序和PROTEUSW仿真文件!
2014-05-07 15:32:33
智能交通燈控制系統要求能根據車流量調整紅綠燈時間,這里需要用到傳感器嗎?如果經過簡單的處理,好像可以不用傳感器,但是要用到比較復雜的算術運算程序,請問有沒有人有這方面的資料啊?謝謝!
2013-03-26 12:20:07
的研究具有重要意義.模糊神經網絡是人工神經網絡和模糊系統相結合的新型網絡結構,把它應用于語音識別系統,使系統不僅具有非線性、自適應性、魯棒性和自學習等神經網絡本來的優勢,也具有模糊推理和模糊劃分等模糊邏輯全文下載
2010-05-06 09:05:35
各位大神,請問有沒有編過模糊PID控制程序或神經網絡控制程序?
2015-01-12 10:50:48
神經網絡模糊系統及其在運動控制中的應用是一本關于人工神經網絡、模糊邏輯系統,以及模糊神經網絡研究成果的專著。作者在簡要介紹神經網絡理論與模糊理論的基礎上,對人
2009-01-13 15:18:34 0
0 摘要本文采用模糊- 神經網絡解耦控制技術實現了對三容系統的解耦及液位控制。Matlab 仿真結果表明該控制系統動態響應快,魯棒性好,具有優異的整體性能。關鍵詞模糊神經網
2009-01-17 21:52:4421 燒結爐系統是復雜系統,用一般的模糊控制方法對爐溫進行控制效果并不令人滿意。本文提出基于神經網絡的自適應模糊控制算法綜合了兩者的優點,系統仿真與初步試驗表明,它
2009-05-26 10:06:4924 模糊神經網絡提供了從人工神經網絡中模糊規則的抽取。本文研究模糊神經網絡的自適應學習、規則插入和抽取及神經-模糊推理的FuNN 模型。把遺傳算法作為系統模糊規則選擇的自
2009-06-06 13:45:4218 利用一種改進的模糊神經網絡實現雙吊點閘門的同步控制。這種方法把模糊控制和神經網絡相結合進行控制系統的建模。與傳統的PID 控制方法相比,該控制方法具有自學習和自適應
2009-06-09 11:32:5516 介紹了基于模糊神經網絡智能火災報警控制系統,在系統中應用了模糊控制理論既提高了系統的精度又最大限度的減少了系統的誤報率,解決了火災報警系統中長期存在的問題。結
2009-06-10 14:09:5316 神經網絡具有自學習、自調整、自適應能力。本文介紹了由PLC 控制實現的神經網絡PID 自適應控制器。實驗表明,該技術對于提高控制精度是行之有效的。具有在調速系統中推廣
2009-06-18 10:53:0611 將神經網絡和PID 控制相結合,提出了一種基于對角遞歸神經網絡整定的PID 控制策略,并將其應用于交流伺服系統的控制。利用對角遞歸神經網絡在線自適應調整PID 控制器的參數,
2009-07-30 09:40:1210 針對現有隧道照明存在的大量電能浪費,提出一種基于模糊神經網絡的隧道照明控制系統實現節能。將車速、車流量和洞外亮度做為系統的輸入,照明回路調光數值做為系統的輸
2009-08-13 15:40:0814 介紹了一種基于神經網絡的拉絲機恒張力收線智能控制系統。該系統針對拉絲機恒張力收線控制系統的非線性與傳統PID 控制方法的不足,采用了一種單神經元自適應PID 控制器對
2009-08-14 08:55:4425 本文針對半主動空氣懸架這種時變的、非線性復雜系統,提出基于神經網絡的自適應控制策略,設計了神經網絡辨識器和控制器。通過仿真計算和分析驗證了其可行性和有效性。
2009-08-18 10:46:4413 采用模糊神經網絡結構,提出一種復合式控制方案,以解決傳統自適應控制中模型的在線辨識和控制器的在線設計問題,達到對不確定非線性系統的高精度輸出跟蹤控制;同時,
2009-08-21 10:20:2217 本文設計了一種基于自適應模糊神經網絡的變步長LMS算法,該算法采用了一種新的模糊控制規則,按照該規則改變LMS算法的步長。文章最后給出了非線性噪聲抵消的仿真結果。關
2009-08-27 11:42:577 基于混合學習算法的模糊神經網絡控制系統 劉美俊廈門理工學院電子與電氣工程系(廈門 361024)摘要:針對復雜非線性系統在控制過程中的不確定性及參數的時變性,
2009-11-01 09:46:1315 本文針對電廠中除氧器對象被控對象非線性、強耦合的問題,采用神經網絡逆控制的方法對除氧器系統進行解耦,結合基于神經網絡的參數自適應PID 控制算法來實現對被控對象的
2009-12-16 15:23:2312 針對中長期負荷預測,本文將模糊理論與神經網絡相結合,提出了基于高木-關野自適應神經網絡模糊推理系統的中長期負荷預測模型。該模型采取神經網絡技術對模糊信息進行處理
2009-12-18 16:48:046 本文提出了用神經網絡模型參考自適應控制器對加工過程進行控制的方法。并以銑床加工過程為例,針對原PID控制器產生超調量過大,控制效果不理想,設計了一個神經網絡辨識器(N
2009-12-26 13:58:0010 提出了一種基于模糊神經網絡卡車路段行程時間實時預測模型,闡述了自適應神經網絡模糊系統(1BCDEFG< )<EH&IJKLCM<B 3NOOP 6QR<I<Q=< 7PME<S,1)367)網絡原理和方法對
2010-02-22 10:43:008 針對網絡控制系統中網絡時延補償的問題,提出了一種模糊自適應PID控制器的設計方法,通過利用在線時延估計方法對時延進行預估計,根據估計時延值在線調節PID三個參數,從而改善系
2010-07-13 16:05:218 針對現有隧道照明存在的大量電能浪費,提出一種基于模糊神經網絡的隧道照明控制系統實現節能。將車速、車流量和洞外亮度做為系統的輸入,照明回路調光數值做為系統的輸出。系
2010-07-13 16:37:5012 采用模糊神經網絡結構,提出一種復合式控制方案,以解決傳統自適應控制中模型的在線辨識和控制器的在線設計問題,達到對不確定非線性系統的高精度輸出跟蹤控制;同時,利用一個魯
2010-07-20 14:40:0215 本文提出一種將模糊控制方法對單路口交通燈的實時控制系統。該系統以PLC為智能交通控制器的核心,系統編程簡單、靈活,具有較高的可靠性。應用實踐表明,本系統設計的模糊
2010-07-20 15:39:5444 神經網絡控制系統通常會面臨多種選擇,如樣本的訓練方式、神經網絡的算法等,不好的選擇會降低預測率。BP(Back Propagation)神經網絡庫存控制系統融合多種庫存控制技術,利用BP算法對
2010-11-13 17:24:0731 交通燈控制系統電路圖
2008-05-22 09:36:12 6155
6155 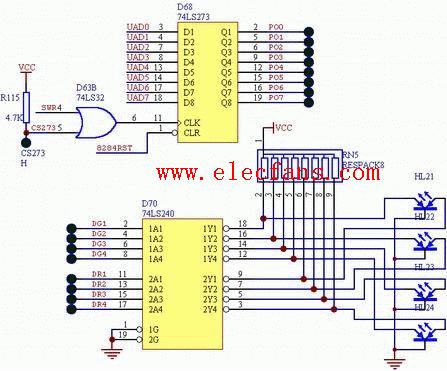
基于FPGA技術的交通燈控制系統設計
交通燈是城市交通監管系統的重要組成部分,對于保證機動車輛的安全運行,維持城市道路的順暢起到了重要作用。目前很
2009-05-13 11:28:352366 
什么是汽車自適應巡航控制系統
自適應巡航控制系統與前面介紹的巡航控制電子系統的不同之處是,自適應巡航控制系統增加了防止
2010-03-17 13:34:173796 摘要:設計了神經網絡自適應滑模控制器。用RBF神經網絡自動調整滑模控制器的切換項增 益,無需建立包含參數攝動和干擾在內的整個系統的精確數學模型,有效提高了系統的穩定性和魯 棒性。采用Lyapunov穩定性理論證明了系統穩定性,并針對常值干擾、時變干擾和
2011-02-23 15:56:5038 對一種非線性時變系統提出了基于神經網絡的自適應逆控制方案。該方案中用兩個動態神經網絡分別作為模型辨識器和自適應逆控制器,詳細推導了在線訓練自適應逆控制器的BPTM(ba
2011-06-28 11:08:4530 在傳統諧波注入法基礎上提出一種神經網絡自適應 諧波電流抑制 方法,根據自適應噪聲抵消技術運用人工神經網絡的自適應和自學習特性檢測出諧波電流并注入電力系統,達到抑制諧波的
2011-08-22 15:44:5314 提出一種用于異步電機位置控制的模糊神經網絡(fuzzy neural network ,FNN) 控制器。其控制系統采用Sugeno 型FNN 和比例積分(proportional integrate , PI) 控制進行構建。在進行試驗測試之前,利用實驗
2011-09-26 14:35:5032 提出了一種基于模糊控制的交叉路口交通燈控制系統。該模糊控制系統以單交叉路車長、車長之差為輸入,以綠燈延時為輸出。并簡單介紹了基于單片機的智能交通控制系統的實現。驗
2011-12-14 11:52:54107 本文針對模糊控制和神經網絡控制的優缺點,將二者進行了結合,對VAV系統府兒J了模糊神經網絡控制方法。即根據模糊系統的結構,將神經網絡學習算法引入模糊控制系統中,決定等價
2012-01-09 16:17:4115 本文提出一種智能交通燈模糊控制的方法,利用FPGA的優勢以及其軟硬件協同工作帶來的便利,將智能交通燈控制在FPGA上實現。由硬件實現可以看出,它能根據采集到的當前相位車流量和
2012-12-28 11:34:114849 基于STC89C52單片機的交通燈控制系統設計 論文類
2015-12-14 15:44:09172 無刷直流電機自適應模糊控制系統建模與仿真-2011。
2016-04-06 13:56:2916 模糊系統、模糊神經網絡及應用程序設計-上科。
2016-04-11 17:14:030 模糊控制與神經網絡-北航,有需要的下來看看。
2016-04-11 17:33:160 智能交通的設計,緩解城市壓力,加強城市交通安全,基于plc交通燈控制系統設計。
2016-05-19 17:19:0718 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-18 11:43:402373 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-19 10:53:1832 具備自學習、自適應的能力,往往還受到人的主觀性的影響.因此不能很好地控制時變小確定的系統。由于神經網絡具有良好的自學習、自適應、聯想等智能,能適應系統復雜多變的動態特性.模糊控制和神經網絡的結合成為學者
2016-09-22 11:15:3423 基于自適應果蠅算法的神經網絡結構訓練_霍慧慧
2017-01-03 17:41:580 基于自適應模糊免疫PID的軋花自動控制系統_董全成
2017-02-08 01:55:303 單片機控制的交通燈控制系統設計c
2017-05-21 10:15:4446 交通燈控制系統設計
2017-09-21 14:36:3452 針對單輸入單輸出非線性系統的不確定性問題,提出了一種新型的基于擴展反向傳播(BP)神經網絡的自適應控制方法。首先,采用離線數據來訓練BP神經網絡的權值向量;然后,通過在線調節伸縮因子和逼近精度估計值
2017-12-01 13:53:310 模糊系統建模應用-自適應模糊控制
2017-12-06 14:57:470 提出含慢、快變控制項的組合控制器。對于慢變子系統,設計一種無需模型的模糊徑向基函數( RBF)神經網絡(FRBFNN)自適應跟蹤控制方案,利用神經網絡觀測器估計關節角速度信息,并對系統的未知非線性函數進行逼近;對于快變子系統,采用
2017-12-11 14:11:310 模糊神經網絡就是模糊理論同神經網絡相結合的產物,它匯集了神經網絡與模糊理論的優點,集學習、聯想、識別、信息處理于一體。
2017-12-29 14:40:4050582 
模糊神經網絡是將人工神經網絡與模糊邏輯系統相結合的一種具有強大的自學習和自整定功能的網絡,是智能控制理論研究領域中一個十分活躍的分支,因此模糊神經網絡控制的研究具有重要的意義。本文旨在分析模糊神經網絡的優缺點及其用途。
2017-12-29 15:35:3328275 神經網絡控制系統又成為模糊控制系統,是個新興的控制方法,就象我們說小明學習很好,但是怎么個好法就是個很模糊的概念。模糊控制不同與經典控制理論的關鍵在于他有一套屬于他自己的模糊算法,這個對數學的要求還是挺高的,模糊控制也成做為智能控制系統。
2018-01-02 14:47:299044 
控制系統存在的不足,提出了一種基于自適應動態規劃(adaptive dynamic programming,ADP)的SVC自適應優化控制策略。采用小波神經網絡和BP神經網絡分別設計執行依賴啟發式動態規劃
2018-01-07 11:32:0219 本文主要介紹了基于FPGA技術的智能交通燈控制系統設計。隨著汽車數量越來越多,現階段的交通燈模式采用的是定時控制,由于車流量是隨時變化的。當此時沒有車通過,而相對的車要等到此方向的綠燈結束顯示紅燈
2018-01-08 15:11:258145 
本文主要介紹了一種基于STC89S52的智能交通燈控制系統的設計與應用。該系統由STC89S52和復位電路、時鐘電路、信號燈控制顯示電路、數碼管控制顯示電路及按鍵控制電路等功能模塊組成,并采用Proteus平臺對交通燈控制系統的虛擬仿真。通過試驗證明本文設計的智能交通燈控制系統滿足系統總體功能。
2018-01-08 17:10:218407 
本文主要介紹了基于MCGS組態軟件的交通燈控制系統設計。城市道路車流量大,容易造成“堵車”現象。要想解決城市紅綠燈處的“大堵車”現象,改善紅綠燈處交通燈控制系統是很有必要的。本文對十字路口交通燈
2018-01-09 10:38:3528236 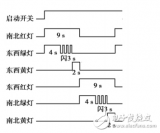
本文主要介紹了基于LabVIEW的交通燈控制系統設計與仿真。傳統的十字路口交通控制系統中,一般只采用紅綠黃燈分方向輪流控制形式,沒有考慮到實時的各方向路面車流輛情況,緊急突發事件的應急處理等,這樣
2018-01-09 11:39:0650562 
本文主要介紹了基于模糊控制的智能交通燈監控系統的畢業設計。交通信號燈作為管制交通流量、提高道路通行能力的有效手段,對減少交通事故有明顯效果。但是車流量是隨時變化的,而傳統的交通燈模式采用的是定時控制
2018-01-09 14:40:496314 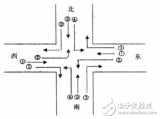
本文主要介紹了一種基于機器視覺識別的交通燈控制系統,對交通信號燈的顏色及其數字進行自動識別。對于交通燈的機器視覺識別,將使世界上7~8%的色盲、色弱患者駕駛汽車成為可能,也為無人駕駛汽車在技術上前進一步。
2018-01-09 15:22:0817003 
本文主要介紹了一種以STC89C52單片機為核心,通過Zigbee模塊遙控進行無線控制的智能交通燈控制系統,交警可通過無線遙控來實現紅綠燈時間長短的改變以適應不同的交通狀況和人群數量,同時數碼管顯示紅綠燈剩余時間,充分體現了物聯網的控制思想并擁有一定的應用價值和市場前景。
2018-01-09 15:47:033734 
本文主要介紹了一種基于超聲計數的智能交通燈控制系統。系統主要由微控制器模塊、電源管理模塊、超聲車流量檢測模塊、紅外遙控模塊、十字路口交通燈組和以太網接口等幾部分組成。本次設計以車流量檢測為基礎的智能
2018-01-09 16:19:454058 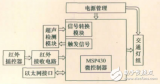
針對現有的交通信號燈控制系統幾乎全部采用的是固定時序的控制方式,無法針對實際交通流量對各車道的放行時間進行自適應性調整,造成了道路資源的浪費。本文設計了一種基于無線傳感器網絡的自適應交通燈控制系統
2018-01-09 16:40:293666 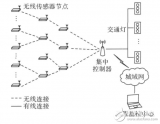
的發展。特別是最近幾年來才興起的模糊自適應控制系統,智能自適應控制系統和基于神經元網絡的自適應控制系統得到了迅速的發展,引起了人們的普遍關注。
2018-03-27 10:26:1652667 針對設計部分依賴、不完全依賴和不依賴受控系統數學模型的控制系統,國內外控制理論界做了多年的努力,發展了許多理論和方法。例如專家系統、模糊控制[1]、神經網絡、多模型方法等。最近無模型自適應控制理論
2018-11-05 09:01:005486 
獲得模糊邏輯系統的參數或具體結構,從而使模糊邏輯系統具有自學習和自適應能力,該過程并不改變模糊系統所具有的模糊化、解模糊化和模糊推理的功能,而是利用神經網絡實現隸屬函數、模糊規則的數字化處理,實現
2019-09-16 08:58:003251 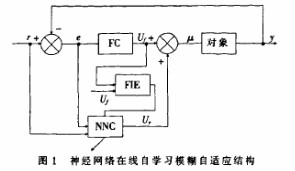
本文檔的主要內容詳細介紹的是交通燈定時控制系統的設計資料說明。
2020-06-28 08:00:001 本文所設計的混合動力汽車采用輪轂驅動技術,根據輪轂驅動電動汽車的技術特點,提出一種基于神經網絡模型參考自適應的控制方法.實現混合動力驅動汽車的電子差速控制。
2021-03-31 11:00:214918 
功能的適應組合,將這樣的系統統稱為神經網絡的控制系統。本文從人工神經網絡,以及控制理論如何與神經網絡相結合,詳細的論述了神經網絡控制的應用以及發展
2021-05-27 15:02:1113 文章系統地闡述了神經網絡自適應控制的本質、優勢與研究進展,介紹了神經網絡自適應控制的不同結構模型及其所具有的特性,分析了目前神經網絡自適應控制尚存在的問題,及其日后的研究重點與方向,指出了神經網絡與自適應控制相結合,應用于控制系統中的優越性和可行性。
2021-05-31 16:35:5411 基于Moore型狀態機的交通燈控制系統
2021-06-17 09:14:1335 基于模糊神經網絡的微型渦噴發動機控制系統
2021-06-23 14:46:1019 利用AT89C51數字電路集成芯片,設計一個交通燈控制系統,并在電路仿真軟件實現相關結果。1.2設計要求(1)可以控制橫道亮綠燈,豎道亮紅燈,兩者交替改變,互不矛盾;(2)給交通燈控制系統設置一個控制開關,用來控制系統緊急暫停通行;
2023-01-03 14:18:2315 1.1?設計要求1.1.1?設計任務?利用Qt-Creator編程實現各個路口紅綠燈及時間顯示,設計一個交通燈控制系統。1.1.2?性能指標要求?(1)按照題目要求使用Qt編程,獨立設計系統所需界面
2023-02-28 09:24:206 交通燈控制系統功能介紹交通燈是城市交通中不可缺少的重要工具,是城市交通秩序的重要保障。本系統就是實現常見十字路交通燈功能。利用NI公司的虛擬儀器軟件平臺LabView設計一個能實現人機交互的智能交通
2023-04-20 15:23:4730 Network, NN)或神經計算(Neurocomputing)。ANN具有自適應學習、自適應處理能力和良好的非線性建模能力,可應用于模式識別、分類、預測、辨識、控制等領域,并在人工智能、機器學習等領域發揮
2023-08-22 16:45:186053 電子發燒友網站提供《基于ARM9交通燈控制系統的設計.pdf》資料免費下載
2023-10-12 09:51:503 方式,實現對電機控制系統的智能優化,提高系統的自適應能力和控制精度。本文將對電機控制系統的神經網絡優化策略進行深入研究,并探討其在實際應用中的效果。
2024-06-25 11:46:481817
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論