點(diǎn)到點(diǎn)ICP做對(duì)了也能實(shí)現(xiàn)簡(jiǎn)單準(zhǔn)確且魯棒的激光里程計(jì)
現(xiàn)有很多LiDAR里程計(jì)都依賴于某種形式的ICP估計(jì)幀間位姿,例如CT-ICP, LOAM等。

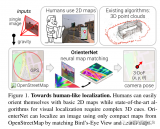
介紹一種新的全景視覺(jué)里程計(jì)框架PVO
論文提出了PVO,這是一種新的全景視覺(jué)里程計(jì)框架,用于實(shí)現(xiàn)場(chǎng)景運(yùn)動(dòng)、幾何和全景分割信息的更全面建模。

激光雷達(dá)SLAM中高效的點(diǎn)云數(shù)據(jù)結(jié)構(gòu)
k-d樹(shù)是一種常用的多維數(shù)據(jù)結(jié)構(gòu),它可以用于范圍搜索、最近鄰搜索等問(wèn)題。但是,在實(shí)際應(yīng)用中,我們經(jīng)常....

淺談光場(chǎng)相機(jī)存在的三大先天缺陷
由于光場(chǎng)相機(jī)為了采集不同視角的信息,在CCD前放置了一個(gè)微透鏡陣列。但是相機(jī)可以采集的總信息量卻是受....

光場(chǎng)相機(jī)在哪些領(lǐng)域發(fā)揚(yáng)光大?
所謂普及,就是指這一設(shè)備的廣泛應(yīng)用,廣泛的應(yīng)用意味著旺盛且龐大的需求。而在需求層面,可以分為To C....

適用于激光SLAM的點(diǎn)云全局特征描述子回環(huán)檢測(cè)方案
目前,SLAM算法通過(guò)估計(jì)的相鄰幀之間的位姿變換不斷疊加進(jìn)行位姿信息計(jì)算,隨著巡檢時(shí)間的增加,每次位....
形狀感知零樣本語(yǔ)義分割
由于大規(guī)模視覺(jué)語(yǔ)言預(yù)訓(xùn)練取得了令人矚目的進(jìn)展,最近的識(shí)別模型可以以驚人的高準(zhǔn)確度對(duì)任意對(duì)象進(jìn)行零樣本....

基于學(xué)習(xí)的激光雷達(dá)定位退化場(chǎng)景估計(jì)
其中,x, y, z表示平移方向上的分量,Φ,θ,ψ表示旋轉(zhuǎn)方向上的分量(歐拉角表示)。向量d_k的....

160億參數(shù),新增多項(xiàng)能力,復(fù)旦MOSS開(kāi)源了
團(tuán)隊(duì)同時(shí)表示,由于模型參數(shù)量較小和自回歸生成范式,MOSS 仍然可能生成包含事實(shí)性錯(cuò)誤的誤導(dǎo)性回復(fù)或....

強(qiáng)勁深度圖像性能現(xiàn)場(chǎng)體驗(yàn)!奧比中光兩款3D標(biāo)品相機(jī)亮相China3DV
Femto Mega作為奧比中光聯(lián)合微軟、英偉達(dá)共同推出的新一代iToF相機(jī),融合微軟第一代深度相機(jī)....

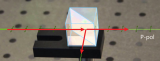
AVM環(huán)視系統(tǒng):魚(yú)眼相機(jī)去畸變算法及實(shí)戰(zhàn)
經(jīng)過(guò)P點(diǎn)的入射光線沒(méi)有透鏡的話,本應(yīng)交于相機(jī)成像平面的e點(diǎn)。然而,經(jīng)過(guò)魚(yú)眼相機(jī)的折射,光線會(huì)交于相機(jī)....

事件和普通圖像如何精準(zhǔn)對(duì)齊?試下分光鏡吧!
但是相機(jī)使用,會(huì)有哪些問(wèn)題?本人咨詢過(guò)廠商和做光學(xué)的同學(xué),他們表示想象不出來(lái)相機(jī)拍攝會(huì)有什么問(wèn)題,而....
計(jì)算機(jī)視覺(jué)方向之圖像拼接簡(jiǎn)介
圖像拼接是將同一場(chǎng)景的多個(gè)重疊圖像拼接成較大的圖像的一種方法,在醫(yī)學(xué)成像、計(jì)算機(jī)視覺(jué)、衛(wèi)星數(shù)據(jù)、軍事....

怎樣才叫真正理解卡爾曼濾波Kalman Filter?
卡爾曼濾波算法:卡爾曼濾波算法包括預(yù)測(cè)、更新和估計(jì)三個(gè)步驟。其中,預(yù)測(cè)步驟通過(guò)狀態(tài)的動(dòng)態(tài)方程來(lái)預(yù)測(cè)系....
MAE再發(fā)力,跨模態(tài)交互式自編碼器PiMAE席卷3D目標(biāo)檢測(cè)領(lǐng)域
MAE以其簡(jiǎn)單的實(shí)現(xiàn)方式、強(qiáng)大的視覺(jué)表示能力,可以在很多基礎(chǔ)視覺(jué)任務(wù)中展現(xiàn)出良好的性能。但是目前的工....
六自由度視覺(jué)定位
基于三維模型的視覺(jué)定位通過(guò)在查詢圖像和三維模型間建立 2D-3D 對(duì)應(yīng)關(guān)系,估計(jì)相機(jī)六自由度的位姿。....
悉尼大學(xué)最新綜述:深度學(xué)習(xí)圖像摳圖
自深度學(xué)習(xí)出現(xiàn)之后,研究者設(shè)計(jì)出了多種多樣的基于卷積神經(jīng)網(wǎng)絡(luò)的解決方案。和傳統(tǒng)方法一樣,早期的深度學(xué)....
雙視圖幾何:你真的理解嗎?
其實(shí)這部分內(nèi)容在大多數(shù)課程和教材中都有涉及,很多人可能也覺(jué)得很簡(jiǎn)單,有一定的套路可言,但是如標(biāo)題所說(shuō)....
輪式移動(dòng)機(jī)器人里程計(jì)分析
但凡涉及到可移動(dòng)的機(jī)器人的導(dǎo)航系統(tǒng),大概率會(huì)涉及到里程計(jì)的計(jì)算,比如輪式移動(dòng)機(jī)器人、無(wú)人機(jī)、無(wú)人艇,....
介紹一種基于編碼器合成里程計(jì)的方案
摘要:本文主要分析輪式移動(dòng)機(jī)器人的通用里程計(jì)模型,并以兩輪差速驅(qū)動(dòng)機(jī)器人的里程計(jì)計(jì)算為案例,給出簡(jiǎn)化....
連放4款UWB芯片新品!這家創(chuàng)企要捅破行業(yè)天花板
UWB技術(shù)在抗干擾性、高定位精度等方面的優(yōu)勢(shì)正在消費(fèi)級(jí)市場(chǎng)凸顯。全球市研機(jī)構(gòu)ABI Research....
Limap:基于3D line的重建算法
但是基于特征點(diǎn)構(gòu)建點(diǎn)云地圖在沒(méi)有足夠穩(wěn)定的關(guān)鍵點(diǎn)去檢測(cè)匹配的時(shí)候,比如室內(nèi)場(chǎng)景,往往效果不好。但是這....
利用TRansformer進(jìn)行端到端的目標(biāo)檢測(cè)及跟蹤
多目標(biāo)跟蹤(MOT)任務(wù)的關(guān)鍵挑戰(zhàn)是跟蹤目標(biāo)下的時(shí)間建模。現(xiàn)存的用檢測(cè)跟蹤的方法采用簡(jiǎn)單的heuri....
決策規(guī)劃系列:運(yùn)動(dòng)規(guī)劃常用算法
有了全局路徑參考信息,有了局部環(huán)境信息了,有了行為決策模塊輸入的決策信息,下一步自然而然的就要進(jìn)行運(yùn)....
NeuralLift-360:將野外的2D照片提升為3D物體
從3D點(diǎn)云中生成可渲染的3D網(wǎng)格:使用一個(gè)基于深度學(xué)習(xí)的方法來(lái)將點(diǎn)云轉(zhuǎn)換為可渲染的3D網(wǎng)格。具體地,....
一文詳解激光雷達(dá)原理之光學(xué)原理
905nm也好,1550nm也好,在自然光光譜中占比重較小,即在相同的自然光強(qiáng)下,這個(gè)波段的強(qiáng)度較低....
基于優(yōu)化的多傳感器全局位姿估計(jì)框架
精確狀態(tài)估計(jì)是自主機(jī)器人的基礎(chǔ)問(wèn)題。為了實(shí)現(xiàn)局部精確且全局無(wú)漂移的狀態(tài)估計(jì),通常將具有互補(bǔ)性質(zhì)的多傳....
決策規(guī)劃:行為決策常用算法
在基于規(guī)則的方法中,有限狀態(tài)機(jī)(FiniteStateMaechine,F(xiàn)SM)成為最具有代表性的方....
英偉達(dá)新方法入選CVPR 2023:對(duì)未知物體的6D姿態(tài)追蹤和三維重建
這種方法適用于任意剛性物體,即使視覺(jué)紋理大部分確實(shí),僅需在第一幀中分割出物體,不需要任何額外的信息,....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)