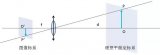
攝像機(jī)標(biāo)定技術(shù)及應(yīng)用
一、為什么要進(jìn)行攝像機(jī)標(biāo)定 隨著機(jī)器視覺(jué)的迅猛發(fā)展,我們已經(jīng)不滿足于使用攝像機(jī)進(jìn)行監(jiān)控、抓拍這種較為....
通過(guò)卷積神經(jīng)網(wǎng)絡(luò)對(duì)路面圖像類型自動(dòng)識(shí)別研究
? 文章提出的工程問(wèn)題是什么? 有什么實(shí)際工程價(jià)值? 在交通負(fù)荷和氣候的影響下,路面系統(tǒng)會(huì)隨著時(shí)間的....


圖像處理的應(yīng)用
最近有人問(wèn)我圖像處理怎么研究,怎么入門,怎么應(yīng)用,我竟一時(shí)語(yǔ)塞。仔細(xì)想想,自己也搞了兩年圖像方面的研....
光伏行業(yè)對(duì)硅片的自動(dòng)檢測(cè)有巨大需求
光伏行業(yè)一直是比拼技術(shù)實(shí)力的戰(zhàn)場(chǎng)。 政策驅(qū)動(dòng)“中國(guó)制造”向“中國(guó)智造”的轉(zhuǎn)型之路上,新能源領(lǐng)域中的光....
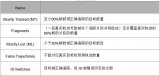
基于機(jī)器視覺(jué)的典型多目標(biāo)追蹤算法應(yīng)用實(shí)踐
TBD(Tracking-by-Detection)與DFT(Detection-Free Trac....

一文徹底搞懂YOLOv8【網(wǎng)絡(luò)結(jié)構(gòu)+代碼+實(shí)操】
從上面可以看出,YOLOv8 主要參考了最近提出的諸如 YOLOX、YOLOv6、YOLOv7 和 ....

傅里葉變換如何用于深度學(xué)習(xí)領(lǐng)域
機(jī)器學(xué)習(xí)和深度學(xué)習(xí)中的模型都是遵循數(shù)學(xué)函數(shù)的方式創(chuàng)建的。從數(shù)據(jù)分析到預(yù)測(cè)建模,一般情況下都會(huì)有數(shù)學(xué)原....

小樣本學(xué)習(xí)領(lǐng)域的未來(lái)發(fā)展方向
什么是小樣本學(xué)習(xí)?它與弱監(jiān)督學(xué)習(xí)等問(wèn)題有何差異?其核心問(wèn)題是什么?來(lái)自港科大和第四范式的這篇綜述論文....

工業(yè)AI視覺(jué)進(jìn)化論
從功能角度出發(fā),工業(yè)視覺(jué)算法可分為圖像處理、定位、檢測(cè)、測(cè)量、識(shí)別;從算法實(shí)現(xiàn)技術(shù)角度就是分類、識(shí)別....

基于深度強(qiáng)化學(xué)習(xí)的視覺(jué)反饋機(jī)械臂抓取系統(tǒng)
機(jī)械臂抓取擺放及堆疊物體是智能工廠流水線上常見(jiàn)的工序,可以有效的提升生產(chǎn)效率,本文針對(duì)機(jī)械臂的抓取擺....

OpenMV初識(shí)
OpenMV是由美國(guó)克里斯團(tuán)隊(duì)基于MicroPython發(fā)起的開(kāi)源機(jī)器視覺(jué)項(xiàng)目,目的是創(chuàng)建低成本,可....

如何基于計(jì)算機(jī)視覺(jué)實(shí)現(xiàn)道路交通計(jì)數(shù)
? 今天,我們將一起探討如何基于計(jì)算機(jī)視覺(jué)實(shí)現(xiàn)道路交通計(jì)數(shù)。 在本教程中,我們將僅使用Python和....

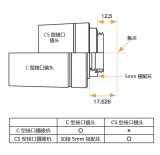
工業(yè)鏡頭的選型方法
? 工業(yè)鏡頭選型 工業(yè)鏡頭選型,是一個(gè)非常重要和關(guān)鍵的環(huán)節(jié)。鏡頭的選型是否合適直接影響機(jī)器視覺(jué)系統(tǒng)的....
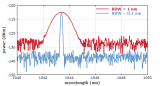
什么是光學(xué)測(cè)量中的信噪比呢?
信噪比是探測(cè)器中信號(hào)功率與噪聲功率的比值。光學(xué)測(cè)量中通常將信號(hào)比(SNR,S/N比)作為一個(gè)特性參數(shù)....
OpenCV實(shí)時(shí)彎道檢測(cè)(詳細(xì)步驟+源碼)
相機(jī)鏡頭扭曲入射光以將其聚焦在相機(jī)傳感器上。盡管這對(duì)于我們捕捉環(huán)境圖像非常有用,但它們最終往往會(huì)稍微....
AI圖像識(shí)別本質(zhì):人類看的是形狀,算法看的是紋理
當(dāng)你看著一張貓的照片,輕松就能知道貓有沒(méi)有條紋,不管照片是黑白照,有斑點(diǎn),還是磨損或者褪色了,都能輕....

Dalsa線陣相機(jī)調(diào)試手冊(cè)
現(xiàn)場(chǎng)采用的相機(jī)型號(hào)即為上表1.1型號(hào)參數(shù)所示,相機(jī)型號(hào)為L(zhǎng)A-CM-16K05A。其中LA是系列名稱....

手機(jī)拍照為什么也需要圖像處理算法呢?
人類進(jìn)入智能手機(jī)時(shí)代后,攝影方式也發(fā)生了巨大變化:用來(lái)拍照的不再只是鏡頭和傳感器了,背后還加載著一系....

智能制造在中國(guó)—中國(guó)機(jī)器視覺(jué)產(chǎn)業(yè)鏈現(xiàn)狀分析
機(jī)器視覺(jué)是指利用相機(jī)、攝像機(jī)等傳感器,配合機(jī)器視覺(jué)算法賦予智能設(shè)備人眼的功能,是人工智能領(lǐng)域中重要的....


機(jī)器學(xué)習(xí)理論:k近鄰算法
KNN(k-Nearest Neighbors)思想簡(jiǎn)單,應(yīng)用的數(shù)學(xué)知識(shí)幾乎為0,所以作為機(jī)器學(xué)習(xí)的....

為什么傳統(tǒng)CNN在紋理分類數(shù)據(jù)集上的效果不好?
在機(jī)器視覺(jué)任務(wù)中,將紋理分析與深度學(xué)習(xí)結(jié)合使用,對(duì)于獲得更好的結(jié)果起到了重要作用。

?使用旭日X3派實(shí)現(xiàn)手勢(shì)檢測(cè)
本篇博客通過(guò)旭日X3搭載手勢(shì)識(shí)別算法,實(shí)現(xiàn)實(shí)時(shí)檢測(cè),同時(shí)測(cè)試其運(yùn)行性能。

雙目三維光學(xué)測(cè)量硬件系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
光學(xué)三維測(cè)量是一項(xiàng)集機(jī)械,電氣,光學(xué),信息工程技術(shù)于一體的前沿技術(shù)。該技術(shù)應(yīng)用光學(xué)成像原理,對(duì)現(xiàn)實(shí)世....

關(guān)于景深最齊全的教程
? 1、概念 指聚焦清晰的焦點(diǎn)前后可接受的清晰區(qū)域 景深很淺時(shí),焦點(diǎn)是一層非常薄的落在物體上的平面,....
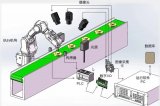
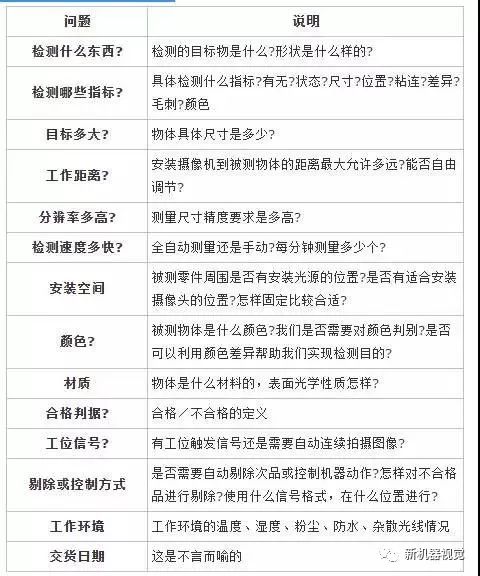
?機(jī)器視覺(jué)系統(tǒng)集成怎么做?
機(jī)器視覺(jué)(Machine Vision)作為光電技術(shù)應(yīng)用的一個(gè)特定領(lǐng)域,目前已經(jīng)發(fā)展成為一個(gè)前景光明....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)