") 基于平面投影的單目視覺AGV定位算法
基于平面投影的單目視覺AGV定位算法

0 引言
視覺定位是計算機視覺中的一個重要研究問題,廣泛應(yīng)用于機器人自主導(dǎo)航、機器人定位、視覺伺服、攝像機校正、目標(biāo)跟蹤、視覺檢測、物品識別和工業(yè)零部件裝配等領(lǐng)域。近年來,計算機視覺飛速發(fā)展,涌現(xiàn)出大量的技術(shù)與算法,如主動視覺、面向任務(wù)的視覺、基于知識的視覺、基于模型的視覺以及多傳感器和集成視覺等方法[1]。根據(jù)使用鏡頭數(shù)目分類,計算機視覺分為單目視覺定位、雙目視覺定位與多目視覺定位。雙目立體視覺是基于視差原理,由多幅圖像獲取物體三維幾何信息。相比于基于多相機的模型定位方法,單目視覺的優(yōu)點主要體現(xiàn)在只需單幅圖像技能實現(xiàn)定位,不存在圖像匹配問題,處理速度快,定位精度高。 傳統(tǒng)視覺對目標(biāo)定位,是通過對攝像機的內(nèi)外參數(shù)進行標(biāo)定來實現(xiàn)的[2]。計算機標(biāo)定方法可以分為傳統(tǒng)標(biāo)定方法、自標(biāo)定方法和基于主動視覺的標(biāo)定方法[3]。傳統(tǒng)標(biāo)定方法是現(xiàn)在使用最為普遍的標(biāo)定方法,利用結(jié)構(gòu)已知、高加工精度的標(biāo)定塊作為標(biāo)定物,用攝像機拍攝若干幅標(biāo)定物的圖片,通過計算2D 圖像點與3D 空間點之間的關(guān)系來完成標(biāo)定,通過對標(biāo)定物的合理設(shè)計得到高精度的結(jié)果。該方法的優(yōu)點是適用各種攝像機模型,定位精度高,缺點是標(biāo)定過程復(fù)雜。自標(biāo)定方法不需要標(biāo)定物,僅通過運動攝像機所拍攝的標(biāo)定圖片中匹配點的關(guān)系來進行標(biāo)定。由于不需要標(biāo)定物,該方法適用范圍廣、靈活性強,但是圖像匹配中需要求解多元非線性方程導(dǎo)致其魯棒性較差[4]。基于主動視覺的標(biāo)定方法需要預(yù)知攝像機的詳細運動信息,這需要昂貴的設(shè)備對攝像機的運動軌跡進行記錄,實驗成本較高[5]。 本文針對AGV 所處的平坦路面的單目視覺定位,提出了一種新的簡單可行的算法。該算法不需要對攝像機進行標(biāo)定,也不需要求解攝像機的內(nèi)、外參數(shù),通過分析圖像像素平面與現(xiàn)實空間平面的幾何關(guān)系,得出像素點與現(xiàn)實點間的映射關(guān)系。實驗結(jié)果表明 , 文中提出的算法定位精度高 , 實時性好 , 為解決計算機視覺的測量、定位與AGV 視覺導(dǎo)引提供一種新的思路,具有進一步研究的價值。1 攝像機模型及存在的問題
1.1 攝像機模型本文采用理想的針孔攝像機模型[6],忽略實際攝像機中的畸變問題。針孔成像模型又稱為線性攝像機模型,空間中任何一點在圖像中的成像位置可以用針孔成像模型近似表示,即任何一點在圖像中的投影位置p 為光心O 與P 點的連線OP 與圖像平面的交點。分別以其次坐標(biāo)m=[u,v ,1]T,W=[X,Y,Z ,1]T 來表示像素點p 及空間點P ,根據(jù)針孔攝像機成像模型,投影方程為
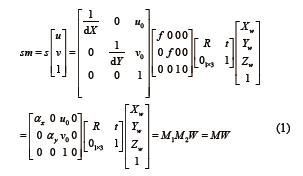
式中:αx=f/ dX 為u 軸上的尺度因子,或稱為u 軸上的歸一化焦距;αy=f/ dY 為v 軸上的尺度因子,或稱為v 軸上的歸一化焦距;M 為3×3 矩陣,稱為投影矩陣;M1 由αx、αy、u 0、v 0 決定,由于αx、αy、u 0、v 0 只與攝像機內(nèi)部參數(shù)有關(guān),稱這些參數(shù)為攝像機內(nèi)部參數(shù);R、t 分別表示攝像機坐標(biāo)系與世界坐標(biāo)系之間旋轉(zhuǎn)矩陣和平移向量,M2 稱為攝像機外部參數(shù)。確定某一攝像機的內(nèi)外參數(shù),稱為攝像機標(biāo)定。
1.2 存在的問題在單目視覺方法測量物體位姿時,如果物體上的某些特征在物體坐標(biāo)系下的坐標(biāo)已知,要求出這些特征在攝像機坐標(biāo)系下的三維坐標(biāo),進而求出攝像機坐標(biāo)與物體坐標(biāo)系之間的相對位姿關(guān)系。在這個問題中,一般需要求得攝像機內(nèi)外參數(shù)進行投影計算。如果攝像機固定,攝像機外參數(shù)一般固定不變,而攝像機內(nèi)參數(shù)只與攝像機硬件有關(guān),定焦攝像頭的內(nèi)參數(shù)固定不變。如果已知攝像機內(nèi)外參數(shù),就已知投影矩陣,這時對任意空間點,如已知它的坐標(biāo),就可以求出它的圖像點的位置。反過來,如果已知某空間點的圖像點的位置, 即使已知攝像機的內(nèi)外參數(shù),也不能唯一確定。這是因為,已知圖像點時,由針孔成像模型,任何位于射線上的空間點的圖像點都是點。因此,該空間點是不能唯一確定的。為解決這一問題,單目視覺在特定環(huán)境內(nèi)設(shè)置一個人工圖標(biāo),圖標(biāo)的尺寸以及在世界坐標(biāo)系中的方向、位置等參數(shù)都是已知的;而雙目視覺通過不同視角拍攝兩幅或多幅圖像,增加約束條件[7]。本文提出一種新的單目視覺投影定位算法,在該算法中,現(xiàn)實平面中的二維空間點先投影到一個虛擬參考平面上,如圖1 所示,該參考平面與攝像機光軸垂直且與成像平面平行,然后虛擬參考平面上的點通過鏡頭平行透視寫入成像平面,并形成圖像像素點。在第二步平行透視中,參考平面與成像平面只是簡單的縮放關(guān)系,保留了透視成像中丟失了的平行屬性與位置屬性。這樣,所述問題就轉(zhuǎn)化為虛擬參考平面與現(xiàn)實平面之間的映射求解問題。
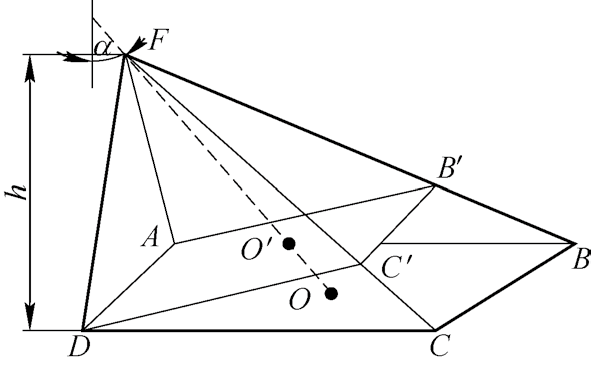
圖1 攝像機、參考平面、現(xiàn)實平面示意圖
2 圖像像素平面與現(xiàn)實平面的映射關(guān)系
首先約定攝像機、參考平面、現(xiàn)實平面的坐標(biāo)系,如圖2~ 圖4 所示。
圖2 像素坐標(biāo)系
圖3 參考平面坐標(biāo)系
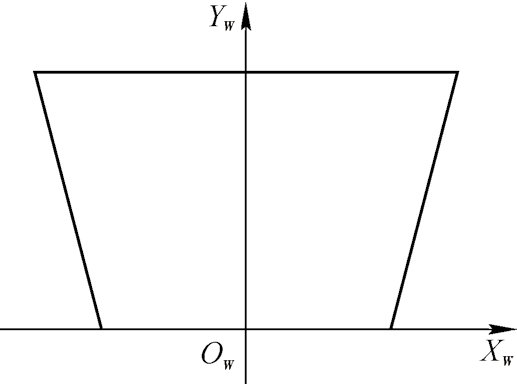
圖4 現(xiàn)實平面坐標(biāo)系
2.1 像素平面到參考平面由于攝像機垂直于參考平面 , 所以像素平面到參考平面是等比例縮放的,它們之間只相差一個比例系數(shù)。由于參考平面AD 邊與現(xiàn)實平面AD 邊重合,可以通過實際測量得到AD 邊的實際長度。參考平面與像素平面等比例縮放,由圖像像素長寬比可求得AB' 長度。若W=|AD |,L =|AB' |,圖像像素分辨率為m×n ,可得對應(yīng)像素平面上一點p (u ,v ) 的參考平面坐標(biāo)為P (Xc ,Yc ),有

2.2 參考平面到現(xiàn)實平面虛擬參考平面與現(xiàn)實平面在模型中是簡單的平面投影關(guān)系,只要求解出平面投影的單應(yīng)性矩陣,就能得到它們之間的映射關(guān)系。平面投影定理[8]:對于一個平面投影,一定存在一個非奇異3×3 矩陣H,使得對任何P 2 上的齊次點x ,有h (x )=Hx 。
或簡記為x' =Hx 。其中H 稱為單應(yīng)性矩陣,這個投影變換有8 個自由度。將參考平面坐標(biāo)(Xc,Yc),現(xiàn)實平面坐標(biāo)(Xw,Yw)用齊次坐標(biāo)表示為(Xc,Yc,1),(Xw,Yw,1)。則參考平面與現(xiàn)實平面間投影關(guān)系為
由于現(xiàn)實空間點在同一平面,設(shè)h 33=1, 每一組對應(yīng)點可得:
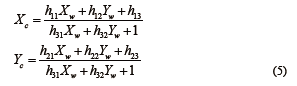
由四組對應(yīng)點就可以得到8 個關(guān)于H 的元素的線性方程組
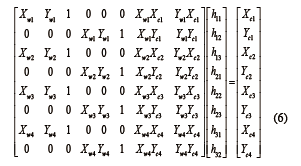
用AH=B 來表示上式,則H=A-1B 。檢測到圖像上特征點的像素坐標(biāo)值,通過式(2)、式(4)可得該特征點在現(xiàn)實平面對應(yīng)點的坐標(biāo),由此可以達到單目視覺定位的目標(biāo)。
3 AGV 定位實驗與結(jié)果分析
為了驗證本文算法的精度,設(shè)計了AGV 定位實驗。采用MV-U300 工業(yè)相機,6~12 mm 變焦鏡頭,拍攝室內(nèi)地面。為了驗證該算法的精度,在地面上放置一張4×4 的黑白棋盤圖。棋盤長寬200 mm,每小格邊長50mm,如圖5 所示。測得相機視野四個頂點坐標(biāo)分別為A(-235, 0),B(-575,960),C(575,960),D(235,0);由相機參數(shù)計算得到的參考平面的四個角點坐標(biāo)為A' (-235,0),B' (-235,352.5),C' (235,352.5),D' (235,0);計算投影變換的單應(yīng)性矩陣,有
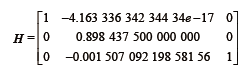
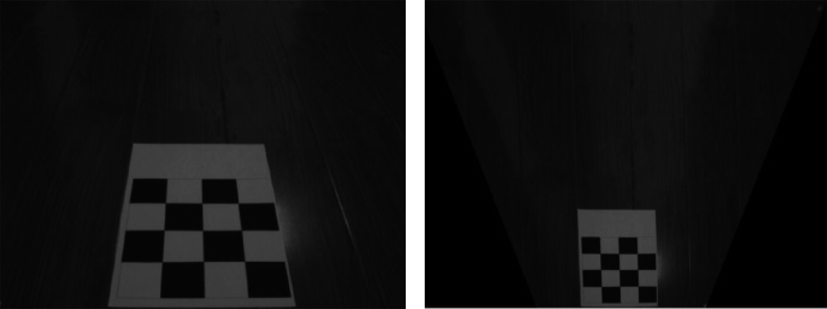
圖5 原始圖像(左)與變換圖像(右)
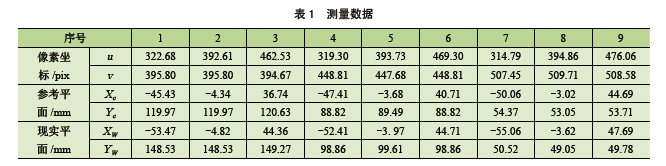
為檢驗本文算法的定位精度,對所采集圖像進行Hough 變換檢測直線,從而獲取圖中所示棋盤圖黑白色塊的9 個交點像素坐標(biāo)( 自左至右、從上往下排),通過本文算法求得對應(yīng)的參考平面交點,再通過單應(yīng)性矩陣求得對應(yīng)點的現(xiàn)實平面坐標(biāo)。具體實驗數(shù)據(jù)見表1。通過現(xiàn)實平面的實際坐標(biāo)計算黑白色塊的邊長,與真實值50 mm 比較,可以發(fā)現(xiàn)橫排誤差在±3% 以內(nèi),豎排誤差在±5% 以內(nèi);豎排誤差比橫排誤差大,主要是因為圖像豎向放大系數(shù)相對變化較大。結(jié)果表明,該方法測量精度較高,可以滿足一般的定位系統(tǒng)要求。
4 結(jié)論
本文提出的算法結(jié)合單目視覺導(dǎo)引AGV 小車,省去了傳統(tǒng)視覺定位方法中的攝像機標(biāo)定環(huán)節(jié),采用平面投影的思路解決單目視覺定位,簡化了視覺導(dǎo)引AGV小車導(dǎo)引模塊的硬件配置與定位計算。該算法針對通用攝像機模型針孔相機模型,利用平面投影原理,對平坦路面實現(xiàn)了單目視覺定位。實驗結(jié)果表明,該方法簡單可行,對室內(nèi)AGV 和室外平坦路面AGV 的路徑導(dǎo)航與視覺避障都有一定的實用價值,為解決機器視覺的定位、測量問題提供了一種新思路。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98044 -
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43664
原文標(biāo)題:基于平面投影的單目視覺AGV 定位算法
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
高效搬運+靈活轉(zhuǎn)向:AGV機器人,智能物流的極簡解決方案!
。 AGV智能物流 AGV的核心技術(shù)在于其自主導(dǎo)航與智能控制能力。通過激光雷達、視覺傳感器等先進設(shè)備,AGV能夠?qū)崟r感知周圍環(huán)境,實現(xiàn)精準(zhǔn)定位

雙目視覺是如何實現(xiàn)深度估計的?
[首發(fā)于智駕最前沿微信公眾號]自動駕駛的純視覺方案中,單目攝像頭因無法直接感知深度,在環(huán)境理解上存在根本局限,雙目視覺技術(shù)在此需求下應(yīng)運而生。它通過模擬人眼,利用雙攝像頭的視差來推算距離,將二維圖像

AGV中IGPS定位精度提升方法
激光/二維碼/磁導(dǎo)航AGV非標(biāo)訂制廠家,部分內(nèi)容來自于 見行AGV:www.jxagv.com IGPS (室內(nèi)全球定位系統(tǒng)) 通過紅外激光和多基站三角測量實現(xiàn)亞毫米級定位,是
AGV的種類以及如何進行合理選擇
? AGV AGV(AGV)是無人駕駛車輛,使用計算機軟件和其他導(dǎo)航技術(shù)來確定其定位和移動。它們可以在制造設(shè)施或倉庫內(nèi)運輸各種材料和成品。基本上,如果你對物料搬運系統(tǒng)的數(shù)字化感興趣,那
AGV視覺導(dǎo)航:智能物流的“智慧之眼”
獲取移動物體在空間中所處的位置、方向和其他環(huán)境信息,并用一定的算法對所獲信息進行處理,建立環(huán)境模型,進而尋找一條最優(yōu)或近似最優(yōu)的無碰路徑,實現(xiàn)安全移動,到達目的地。 AGV物流倉儲 視覺導(dǎo)航的核心是通過攝像頭采集環(huán)境圖像,結(jié)合計
AGV:智能制造時代的物流中樞
生力軍。 AGV立庫 一、技術(shù)突破:從軌道到無軌的智能進化 多模態(tài)導(dǎo)航系統(tǒng) 現(xiàn)代AGV采用SLAM(同步定位與建圖)技術(shù),通過激光雷達+視覺融合方案實現(xiàn)厘米級
基于凌智視覺識別模塊的基于單目視覺的目標(biāo)物測量裝置
1.視覺測量整體方案本視覺測量系統(tǒng)采用單目視覺技術(shù)實現(xiàn)目標(biāo)物距離

雙目視覺在智能駕駛領(lǐng)域的應(yīng)用
圍繞“雙目智駕應(yīng)用”,我們將推出系列文章深入解析雙目視覺如何跨越技術(shù)鴻溝,在中國智駕的沃土上生根發(fā)芽,探索其賦能未來出行的無限可能。
AGV小車中的動態(tài)路徑規(guī)劃算法揭秘
并非一成不變時,動態(tài)路徑規(guī)劃能力就顯得至關(guān)重要。本文將深入探討幾種主流的動態(tài)路徑規(guī)劃算法(如A、Dijkstra、RRT等),并解析它們?nèi)绾卧?b class='flag-5'>AGV行業(yè)中大顯身手。 為何需要動態(tài)路徑規(guī)劃? 1.簡介 傳統(tǒng)的靜態(tài)路徑規(guī)劃假設(shè)環(huán)境是完全已知的

UWB單基站360°測距定位400米,二維測距定位解決方案
環(huán)境的定位服務(wù)。本文將詳細介紹一款全新的、基于 PDOA(到達相位差)算法的 UWB 平面定位方案,它具備單基站
UWB 單基站二維定位:400 米廣域覆蓋的革新性方案
環(huán)境的定位服務(wù)。本文將詳細介紹一款全新的、基于?PDOA(到達相位差)算法的?UWB?平面定位方案,它具備單基站

打破室外全域工作“盲區(qū)”!廣和通雙目視覺算法將成就云深處科技機器狗“慧眼”
雙目視覺模塊RV-BOT為云深處科技四足機器人打通室外工作鏈路。通過深度融合廣和通自主研發(fā)的雙目視覺算法,RV-BOT將顯著提升了室外場景中的定位精度,為國產(chǎn)足式機器人的自主導(dǎo)航與智能
發(fā)表于 05-15 14:26
?1636次閱讀

【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
相機標(biāo)定是視覺系統(tǒng)的基石,直接影響后續(xù)圖像處理的精度。書中詳細介紹了單目和雙目相機的標(biāo)定流程,包括標(biāo)定板的使用、參數(shù)優(yōu)化以及標(biāo)定文件的應(yīng)用。
實際應(yīng)用中,標(biāo)定誤差可能導(dǎo)致機器人定位偏差,因此標(biāo)定過程
發(fā)表于 05-03 19:41
細說AGV叉車的導(dǎo)航,如何精準(zhǔn)定位并選取最優(yōu)路徑?
AGV無人叉車在倉庫廠房內(nèi)之所以能精確定位主要依賴于先進的導(dǎo)航技術(shù)和感知系統(tǒng)。聯(lián)核科技將為大家介紹常見的AGV無人叉車在工廠中實現(xiàn)精確定位的方式:聯(lián)核科技官網(wǎng)-

一種基于分數(shù)階 PID 直流電機調(diào)速的 AGV 控制系統(tǒng)
電傳感器實現(xiàn)避障,并采用上位機對其進行監(jiān)控。為達到 AGV 電機調(diào)速的穩(wěn)定性與實時性,采用分數(shù)階 PID 算法進行控制,通過 Matlab軟件進行建模與仿真,驗證其可行性。最后,經(jīng)實際應(yīng)用場合驗證,AGV 小車具有抗干擾能力強,
發(fā)表于 03-25 15:10



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論