機(jī)器視覺系統(tǒng)的基本原理 機(jī)器視覺技術(shù)的發(fā)展現(xiàn)狀和應(yīng)用
如今,中國(guó)正成為世界機(jī)器視覺發(fā)展最活躍的地區(qū)之一,應(yīng)用范圍涵蓋了工業(yè)、農(nóng)業(yè)、醫(yī)藥、軍事、航天、氣象、....

關(guān)于貝葉斯概念進(jìn)行形式化的建模和推理
在統(tǒng)計(jì)學(xué)中,通常不會(huì)明確地為所有的現(xiàn)有經(jīng)驗(yàn)附加條件,因?yàn)樗强梢约僭O(shè)的。出于這個(gè)原因,在本書中,我們....

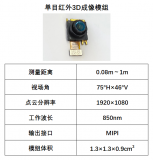
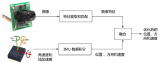
以單顆CMOS攝像頭重構(gòu)三維場(chǎng)景,維悟光子發(fā)布單目紅外3D成像模組
硬件系統(tǒng)的輕量化和降本是3D視覺市場(chǎng)演進(jìn)的必然趨勢(shì)。維悟光子通過底層原理的創(chuàng)新,僅利用單目CMOS相....
如何在無人機(jī)上部署YOLOv4物體檢測(cè)器
在 label 中填寫待標(biāo)注目標(biāo)名稱,然后將對(duì)話框拖到一邊在主窗口中開始標(biāo)注,鼠標(biāo)滾輪放大縮小圖像,....

基于Python實(shí)現(xiàn)隨機(jī)森林算法
機(jī)器學(xué)習(xí)算法是數(shù)據(jù)挖掘、數(shù)據(jù)能力分析和數(shù)學(xué)建模必不可少的一部分,而隨機(jī)森林算法和決策樹算法是其中較為....



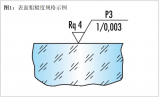
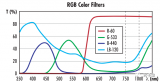
光學(xué)表面粗糙度,這些知識(shí)你都了解嗎?
微缺陷是可以在光學(xué)光滑表面上發(fā)現(xiàn)的凹坑和劃痕。它們通常使用光學(xué)輪廓儀、顯微鏡或顯微圖像比較儀進(jìn)行量化....
關(guān)于數(shù)據(jù)挖掘的十種算法原理講解
數(shù)據(jù)挖掘主要分為三類:分類算法、聚類算法和相關(guān)規(guī)則,基本涵蓋了當(dāng)前商業(yè)市場(chǎng)對(duì)算法的所有需求。這三類包....

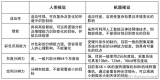
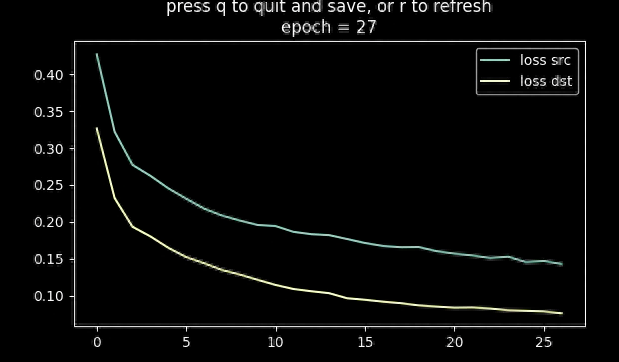
使用Pytorch和OpenCV實(shí)現(xiàn)視頻人臉替換
本文將分成3個(gè)部分,第一部分從兩個(gè)視頻中提取人臉并構(gòu)建標(biāo)準(zhǔn)人臉數(shù)據(jù)集。第二部分使用數(shù)據(jù)集與神經(jīng)網(wǎng)絡(luò)一....
C#模式匹配完全指南
要使用模式匹配,首先要了解什么是模式。在使用正則表達(dá)式匹配字符串時(shí),正則表達(dá)式自己就是一個(gè)模式,而對(duì)....
面向高精度領(lǐng)域的視覺伺服算法匯總
基于圖像的視覺伺服是一種成熟的控制技術(shù),它可以在三維空間中移動(dòng)攝像機(jī),從而將圖像平面的特征配置驅(qū)動(dòng)到....


Yolov5理論學(xué)習(xí)筆記
網(wǎng)絡(luò)在初始錨框的基礎(chǔ)上 基于訓(xùn)練數(shù)據(jù) 輸出預(yù)測(cè)框,因此初始錨框也是比較重要的一部分。見配置文件*.y....

GitHub熱榜,零基礎(chǔ)學(xué)C++教程
但沒想到,兩年內(nèi),這個(gè)項(xiàng)目受到越來越多人的追捧,并在本月初登上了熱榜,于是光城同學(xué)對(duì)整個(gè)項(xiàng)目的結(jié)構(gòu)做....

機(jī)器學(xué)習(xí)迅速發(fā)展,邊緣設(shè)備實(shí)現(xiàn)視覺AI應(yīng)用
這個(gè)重大發(fā)展是一個(gè)轉(zhuǎn)折點(diǎn)。從那時(shí)起,深度神經(jīng)網(wǎng)絡(luò)在性能/精度兩個(gè)方面不斷迎來巨大進(jìn)展。2015年Re....
YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)訓(xùn)練策略詳解
前面已經(jīng)講過了Yolov5模型目標(biāo)檢測(cè)和分類模型訓(xùn)練流程,這一篇講解一下yolov5模型結(jié)構(gòu),數(shù)據(jù)增....
機(jī)器視覺應(yīng)用項(xiàng)目的文檔應(yīng)包括哪些
一、組織結(jié)構(gòu) 機(jī)器視覺應(yīng)用項(xiàng)目涵蓋了光、機(jī)、電、液、氣、軟件、網(wǎng)絡(luò)、數(shù)據(jù)庫(kù)等多種技術(shù),項(xiàng)目管理繁瑣且....
一文捋順千億模型訓(xùn)練技術(shù):流水線并行、張量并行和3D并行
整個(gè)樸素層并行前向傳播和后向傳播的過程如上圖所示。GPU1執(zhí)行前向傳播, 并將激活 (activat....
圖像處理之目標(biāo)檢測(cè)的入門總結(jié)
目標(biāo)檢測(cè)中有很大一部分工作是做圖像分類。對(duì)于圖像分類,不得不提的是2012年ImageNet大規(guī)模視....

在Windows電腦上配置了一個(gè)深度學(xué)習(xí)環(huán)境!
而對(duì)于 Windows 操作系統(tǒng),沒有多少文章詳細(xì)解釋這一過程。所以我打算自己來試試。這些天,經(jīng)過多....
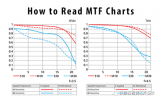
分辨率單位、換算及鏡頭與感光器像素的匹配
常用于表示 相機(jī)的攝影分辨率(是指鏡頭和相機(jī)的綜合分辨率), 每像高最多可以分辨多少條線數(shù) ; 舉例....

SLAM領(lǐng)域中的VIO(視覺慣性里程計(jì))
IMU測(cè)量可以提高視覺SLAM在某些復(fù)雜場(chǎng)景的魯棒性,在于相機(jī)快速運(yùn)動(dòng)、動(dòng)態(tài)障礙物、光線明暗變化明顯....
路徑規(guī)劃算法實(shí)現(xiàn)原理
本文會(huì)用matlab實(shí)現(xiàn)Dijkstra算法,并且會(huì)分享一些函數(shù)用法的鏈接,也是本人學(xué)習(xí)得來,供大家....




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)