") 波士頓動力Atlas機器人get自主導航新技能
波士頓動力Atlas機器人get自主導航新技能

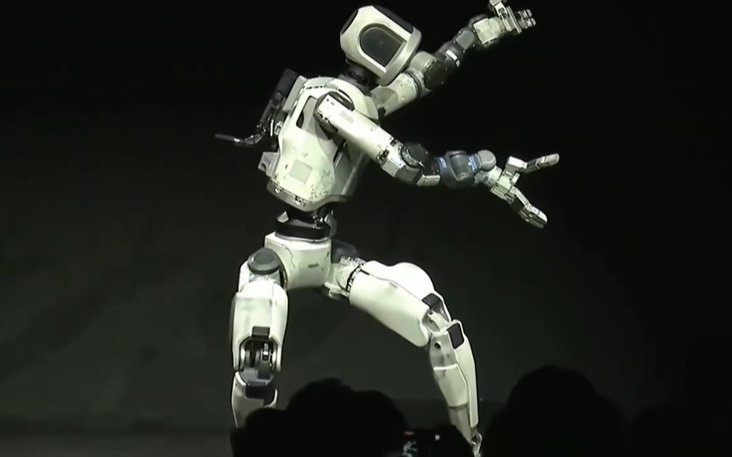
2019年7月5日,佛羅里達人類與機器認知研究所 (IHMC)發(fā)布最新雙足機器人的自主行走程序成果,實驗體波士頓動力機器人Atlas可自主導航,通過不同地形路面,完全實現(xiàn)機器人自主行走!
機器人可以自主應對各種復雜地形,包括窄橋與凹凸不平的上下坡路。
在視頻中,研究人員使用了卡耐基自動化多感應設備SI“腦”感應器,來掃描生成一個環(huán)境的點數(shù)據(jù)云,再通過將這個環(huán)境數(shù)據(jù)轉化程多個平面。
這樣就可以將感應器收集的龐大數(shù)據(jù)具象化成一個更緊湊的形式,隨后將這些平面轉化成獨立的多邊形物體,在這個環(huán)境圖的基礎上,就可以計算出機器人從起點到終點的所有可能路徑。
利用規(guī)劃算法機器人,還可以側身通過狹窄通道。
當路徑受阻時,機器人也能重新規(guī)劃路徑到達終點
IHMC稱 目前機器人的自主行走成功率窄橋50% 凹凸地面90% 平地可達100%
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222273 -
波士頓動力
+關注
關注
3文章
178瀏覽量
14014
原文標題:波士頓動力Atlas機器人get自主導航新技能
文章出處:【微信號:robotinside2014,微信公眾號:移動機器人產業(yè)聯(lián)盟】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
熱點推薦
全球首次!中國機器人原地側空翻,打破技術壁壘
人形機器人的原地空翻。 ? 有意思的是,就在不久后,波士頓動力也發(fā)布了一段視頻,里面不僅同樣演示了機器人側空翻的動作,還表演了許多其他類似人類的動作。而不久前,深圳眾擎
CES 2026機器人爭霸:中國軍團攜全棧技術突圍,波士頓動力Atlas遇勁敵
往屆消費電子展(CES)上的人形機器人,仿佛是對遙遠未來的精心調控式預演 —— 雖令人印象深刻,卻始終局限于原型機與概念演示的安全范疇。2026 年CES上則徹底打破了這一格局,人形機器人投入到實際作業(yè)。
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
機器人· 應用領域:迎賓機器人、養(yǎng)老機器人、導覽機器人· 多攝像頭輸入:同時實現(xiàn)人臉識別(迎賓)、跌倒檢測(養(yǎng)老)、自主導航避障(導覽)等多
發(fā)表于 10-29 16:41
Meta重磅入局人形機器人,目標打造“機器人界的安卓系統(tǒng)”
在人工智能與虛擬現(xiàn)實領域深耕多年的Meta,正式將目光投向了人形機器人這一新興賽道。與特斯拉、波士頓動力等公司聚焦硬件研發(fā)不同,Meta選擇了一條差異化路徑:不做硬件制造商,而是打造開放的軟件平臺。
全國首屆人形機器人線纜技術研討會圓滿召開!
融入社會生活的各個領域,成為推動產業(yè)升級和社會進步的重要力量。 根據(jù)高工機器人產業(yè)研究所預測,2030年全球人形機器人的市場規(guī)模預計將達到150億美元。特斯拉、波士頓動力、宇樹科技等巨
海默智能噴涂機器人——為工業(yè)噴涂解鎖新技能
在工業(yè)噴涂領域面臨高精度與柔性化雙重挑戰(zhàn)的今天,傳統(tǒng)方式受限于編程效率與復雜曲面適應性,而資深技師的寶貴經驗亟待數(shù)字化傳承。海默機器人依托技術積累,推出移動式慣導隨動噴涂協(xié)作機器人,以“雙核動態(tài)捕捉

對話:人形機器人連接器與線纜有何攻關點?
當波士頓動力Atlas完成后空翻等高難度動作,當宇樹人形機器人在春晚穿起花棉襖轉起手絹,當加速進化T1機器人角逐于足球場上,人形

輪式移動機器人電機驅動系統(tǒng)的研究與開發(fā)
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間
發(fā)表于 06-11 14:30
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI
。 ? 包括 Agility Robotics、波士頓動力、傅利葉、Foxlink、銀河通用、Mentee Robotics、NEURA Robotics、General Robotics、Skild AI 和小鵬機器人在內的多
發(fā)表于 05-19 17:53
?1772次閱讀

盤點#機器人開發(fā)平臺
Athena機器人****開發(fā)平臺思嵐推出Athena機器人開發(fā)平臺,有望主導機器人開發(fā)平臺未來市場-電子發(fā)燒友網(wǎng)AUTO CUBEROS機器人
發(fā)表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統(tǒng)、定位系統(tǒng)、導航系統(tǒng)、智能交互系統(tǒng)和運動系統(tǒng)協(xié)同工作,來實現(xiàn)為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統(tǒng)
傳感器類型 :機器人配備了多種傳感器
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我的心得體會
發(fā)表于 05-03 19:41
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內容初識
、Gazebo仿真(含RGBD相機/激光雷達仿真)、實物機器人運動控制,實現(xiàn)\"仿真→實物\"的無縫銜接
高階應用篇(7-9章)
聚焦視覺SLAM、自主導航等前沿場景,提供完整項目鏈路(如
發(fā)表于 04-27 11:24
復合機器人是通過什么導航方式?
在智能制造浪潮中,復合機器人是通過什么導航方式實現(xiàn)高精度、強適應性的自主作業(yè)?這一問題的答案,不僅關乎技術路徑的選擇,更決定了工業(yè)柔性化的未來高度。作為行業(yè)領軍者,富唯智能以“激光SLAM+3D視覺
機器人靈巧手進入規(guī)模量產時刻!4款新品亮相
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)人形機器人的運動能力,自今年開始卷得飛起,宇樹、眾擎、智元、波士頓動力等相繼放出越來越離譜的機器人演示,人形機器人




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論