 復雜環境下的自動駕駛高精度定位技術
復雜環境下的自動駕駛高精度定位技術

定位/導航負責實時提供載體的運動信息,包括載體的:位置、速度、姿態、加速度、角速度等信息。
自動駕駛對定位系統的基本要求:
1. 高精度:達到厘米級。
2. 高可用性:保持它的穩定性,自動駕駛測試已經從封閉的場景轉移到更開放的場景,這要求我們定位系統能處理更多更復雜的情況。
3. 高可靠性:整個定位的輸出是感知,規劃與控制的輸入,如果定位系統出現偏差將會導致很嚴重的后果。
4. 自主完好性檢測:因為我們系統的可靠性只能做到非常接近100%,但是難以達到真正的100%,這要求我們在沒有辦法提供準確的輸出的時候,能及時的警告用戶,采取措施,避免發生事故。對它的要求就是要保證較低的虛警率與漏警率。
為了滿足自動駕駛對導航與定位的要求,采用的方法有:
慣性導航 INS
全球導航衛星系統 GNSS
高精地圖與線上激光 lidar 點云匹配定位
里程計
結合車輛運動特性的運動約束
接下來介紹下慣性測量單元 IMU ,目前自動駕駛常用的按照精度分為兩類:
一種是基于光纖陀螺 FOG 的 IMU ,它的特點是精度高,但同時成本也高,一般應用于精度要求較高的地圖采集車輛。
第二種是基于 MEMS 器件的 IMU ,它的特點是體積小,成本低,環境適應性強,缺點是誤差大,如果把它應用在自動駕駛測試車輛中,需經過比較復雜的處理。
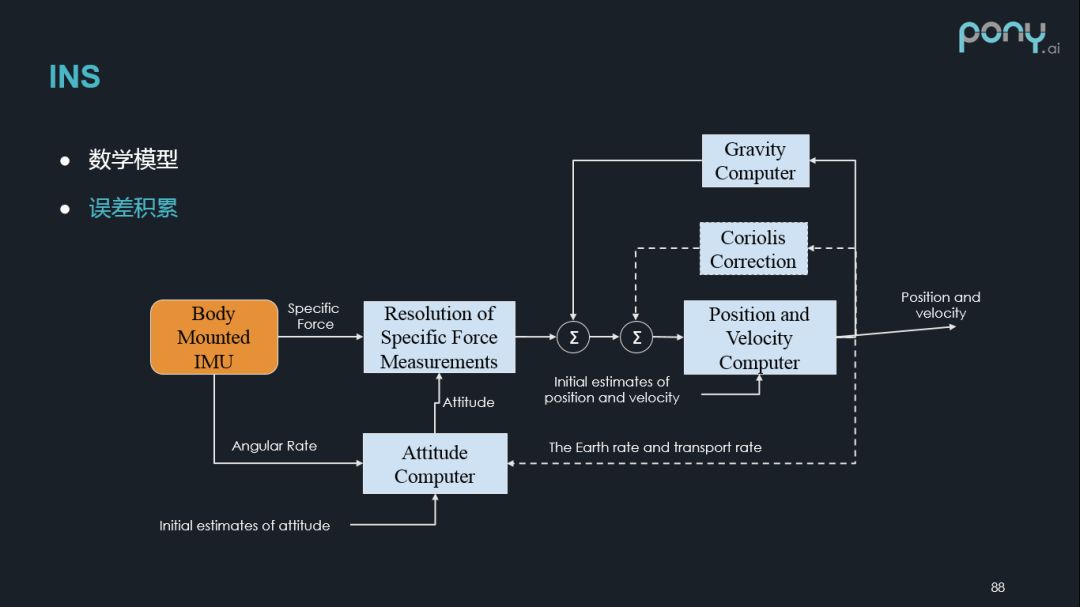
為了有 IMU 輸出的原始數據得到導航定位輸出,需要進行捷聯慣性導航 ( SINS ) 解算,包括這樣的幾個模塊:
1.陀螺輸出角速度信息積分得到姿態
2.采用姿態信息對加速度計輸出的比力做轉換,由載體坐標系到導航坐標系
3.重力計算,有害加速度,地球自轉角速度等補償
4.加速度信息積分得到速度與位置
由于積分過程的存在,造成輸出誤差隨著工作時間發生積累。
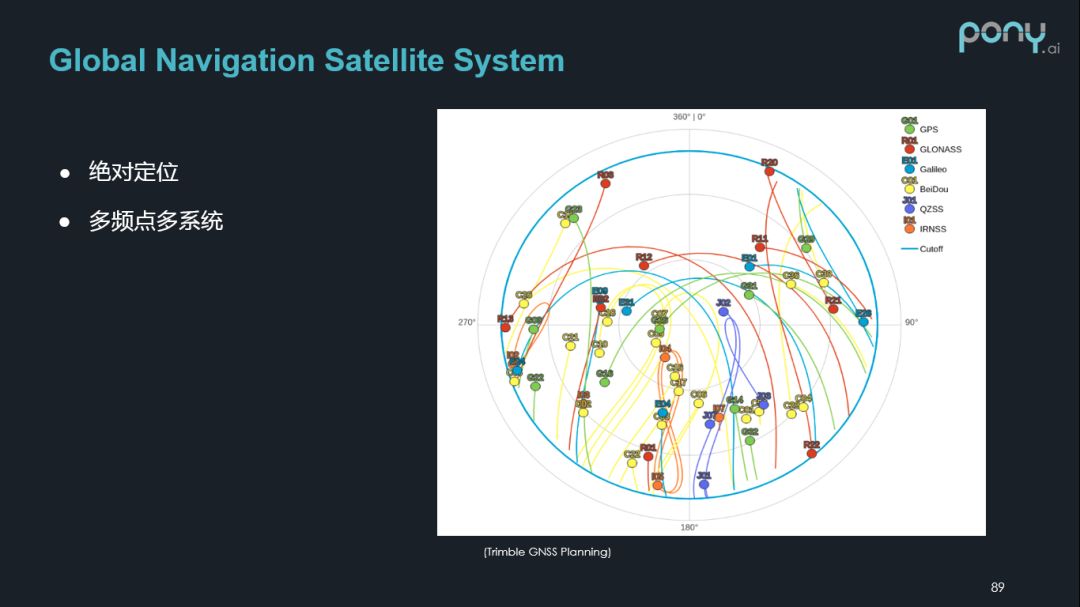
下面介紹下全球衛星定位導航,它是基于測定的絕對定位方案,誤差不會隨著工作時間以及載體運動發生變化。
目前全球衛星導航的一個顯著的特點是由單頻單系統向多頻多系統轉變,比如我們國家的北斗導航系統,俄羅斯的 Glonass ,歐盟的 Galileo 等。這幅圖是北京某一天所能接收到的衛星信號的星空圖,可見基本可以保證在任意時間我們都能收到35顆以上的衛星。多頻多系統在極大的程度上提高了我們導航系統的可靠性與可用性。
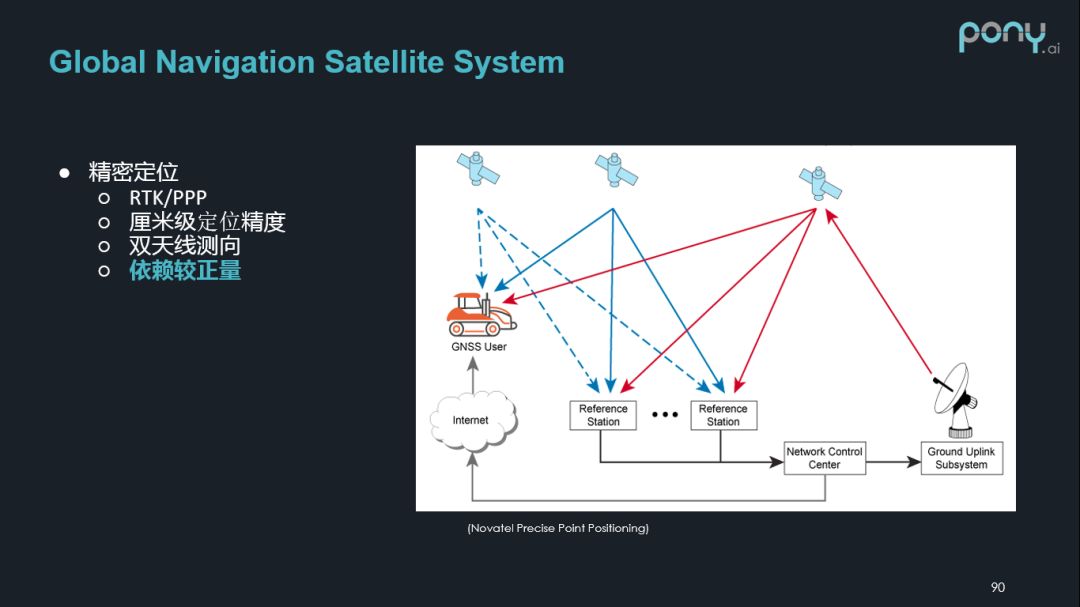
另外一個顯著的特點是精密定位,在民用領域的廣泛應用,尤其是基于載波相位動態差分的 RTK 技術在智能駕考,無人機,精密農業等領域得的了普遍的應用。在自動駕駛領域他的優點是:
厘米級定位精度
雙天線測向
精密定位在提高定位精度的同時,由于需要基站信息,這也增加了整個系統對于基站(基站服務提供商)和網絡信號的依賴。
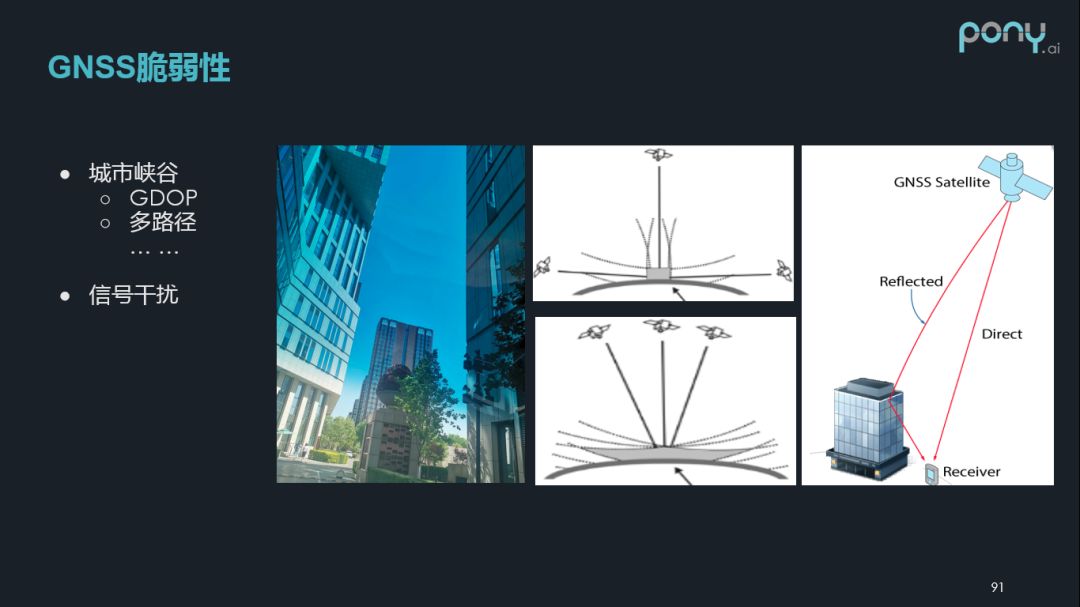
因為 GNSS 是基于衛星定位的導航,具有非常脆弱的特點:
我們在城市里經常會遇到城市峽谷,使我們沒辦法接收低仰角的衛星信號,極大的增加了我們定位的因子,增大了定位結果的不確定性。另外一個是信號干擾,車輛本身及加裝設備等使車輛的電磁環境非常惡劣,如果處理不得當,會嚴重影響接收機的收星及觀測值的質量。
接下來是基于高清度地圖匹配定位,它是事先建立的高精度地圖,配合我們線上的激光點云,可以做到絕對定位,厘米級高精度,它的一個顯著的局限性是增加了我們對高精地圖的依賴。
另外一個是輪式傳感器 Wheel Sensor ,自動駕駛目前獲得車輪的信息有兩種方法:外接和內置。
外接,它的特點是分辨率和精度都非常高,缺點是結構復雜,可靠性難以保證,通常用于我們的地圖采集車。
內置傳感,它的特點是無需外接設備,缺點是精度低,誤差比較大,如果用于測試車輛需要經過很多的處理才可以。
另外,IMU 的敏感軸,很難保證與車的運動方向是完全平行的,所以需要做一個精確的標定,除了輪速的輸出,要得到有用的車速信息和里程信息,需要做一些推算,需要一些車輪的參數,而車輪的參數會隨著我們的工況發生變化,所以我們需要對它做在線的估計。在這個過程中,我們的計算誤差會隨著運動的距離發生積累,且會受到路況的影響,比如輪胎打滑或者過減速帶。
我們還可以結合車輛的運動特點做些約束。比如我們可以通過一些方法檢測車輛是否處于靜止,這樣就可以假設在靜止的時候速度等于0,可以保證我們在極端的情況下,我們的定位結果不發生很大的誤差。我們可以加入一些車輛橫向或者縱向的約束條件加入到多傳感器融合的系統中。
在獲得傳感器輸出數據之后,我們整個多傳感器融合定位,包括幾個部分:
1. 數據預處理,將慣性導航解算,GNSS 的質量控制,雷達數據的誤差補償,還有基于輪式傳感器的計算,以及在線估計和補償。
2. 基于雷達數據和高精地圖的匹配定位。
3. 四個核心模塊:
ZUPT/ZIHR/NHC,車輛運動約束部分
INS Alignment,慣性導航初始對準部分
Integrated,組合部分
FDI,故障檢測與隔離部分
4. 安全相關的模塊,就是對于輸出的完好性監測。
目前我們的導航定位優化方法,還是基于傳統得卡爾曼濾波器,其優化的一個指標是使狀態方差達到最小。在建立 Kalman Filter 模型的時候,首先要選擇狀態變量,目前我們還是基于導航參數誤差+車載的傳感器誤差,作為狀態估計。然后狀態方程通過一步預測和量測更新,實現我們在時間域的遞推。
下面簡單介紹下故障診斷與隔離,傳統的軟件方法有很多,比如卡方檢測等,另外是硬件上的冗余。如果我們可以配備多套 GNSS/IMU ,我們可以配合軟件解析余度實現多個冗余,來提高可靠性。
典型場景:
首先是一個非常典型的場景,視野非常開闊,這時我們可以利用,Gnss/Rtk ,Scan Math Pose 作為量測量校準 IMU/ Wheel sensor 誤差,并作出補償。
這個場景是我們的車輛運行在一個激光雷達縱向特征非常不明顯的橋上,導致我們的高精定位在縱向上失效情況。解決辦法是使用 GNSS, IMU,Wheel Sensor 信息,檢測 scan match 縱向失效情況, 使其不影響定位系統輸出。
上面這個場景是我們的激光雷達由于點云被遮擋,導致我們與高精地圖匹配定位失敗,這要求我們整個系統能不依賴于匹配定位,也能輸出非常可靠的結果。
這倆個場景是對于衛星導航來說非常惡劣的場景,需要我們從傳感器融合部分去處理,使其具有野值的剔除能力,以及對它參數的自適應調節能力。
這個場景更極端,是車輛穿越高架橋的下面,導致我們整個衛星定位導航失敗,此時需要我們的系統能獨立于衛星導航,也能可靠的工作,得到可靠的結果。
嘉賓介紹
崔留爭,Pony.ai 資深研發工程師。中國科學院大學工學博士,負責 Pony.ai 多源信息融合定位技術研發。曾就職于 DJI ,負責高精度定位技術,Gnss/Ins 組合導航等相關的研發工作。
-
定位系統
+關注
關注
10文章
655瀏覽量
37596 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179793
原文標題:復雜環境下的自動駕駛高精度定位技術
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

麥斯塔MST8011AI-21系列晶振:自動駕駛的高精度“節拍器”
導遠科技高精度定位系統落地自動駕駛公交車
如何制作一張自動駕駛高精度地圖?

自動駕駛中常提的高精度地圖是個啥?有何審查要求?

自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛是為了“增強人”,還是為了“替代人”?
淺析4D-bev標注技術在自動駕駛領域的重要性
自動駕駛技術落地前為什么要先測試?
導遠科技亮相2025歐洲高級輔助與自動駕駛技術博覽會
自動駕駛安全基石:ODD
自動駕駛中常提的“NOA”是個啥?

愛普生高精度車規晶振助力激光雷達自動駕駛




 工商網監
工商網監
評論