 如何讓3D人形機器人學會行走
如何讓3D人形機器人學會行走

來自英特爾AI實驗室和俄勒岡州立大學工程學院協作機器人和智能系統研究所的研究人員結合了多種方法,制作了性能更好的強化學習系統,可應用于機器人控制,控制自主車輛功能的系統和其他復雜系統。
協同進化強化學習(CERL)可以在類人、Hopper、Swimmer、HalfCheetah和Walker2D等基準測試中獲得更好的性能。使用CERL方法,研究人員能夠基于OpenAI的Humanoid基準測試使3D人形機器人直立行走。
這些成果在一定程度上是通過訓練系統實現的,該系統探索了更多的強化學習訓練環境,以尋求獎勵并完成特定的任務。
環境探索對于確保記錄各種經驗并考慮行動方案非常重要。研究人員在一篇解釋CERL工作原理的論文中說,與環境探索相關的問題已經出現,特別是在使用深度強化學習來完成具有挑戰性的現實任務越來越普及的情況下。該論文寫道,“神經進化將整個過程結合在一起,產生了一個超越任何個體學習者能力的學習者。”
CERL將基于策略梯度的強化學習和進化算法相結合,然后在每批或每一代訓練系統中選擇表現最佳的神經網絡。這樣,研究人員可以就可以使用最強大的神經網絡來創建新一代的系統,并且可以將計算資源分配給實現最佳性能的算法。
CERL還結合了重放緩沖區,用于存儲學習者在環境中的體驗,以便創建單個重放緩沖區并在系統之間共享體驗,從而實現比以前方法更高的樣本效率。
當前,人工智能正在從多個方面賦予機器人越來越多的能力,相信隨著相關技術的不斷增強,人形機器人的應用場景也將會大大拓展。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31079瀏覽量
222282
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人 3D 視覺路線之爭:激光雷達、雙目和 3D - ToF 誰更勝一籌?
電子發燒友網報道(文 / 吳子鵬)在人形機器人的設計方案中,3D 視覺技術是實現環境感知與智能化決策的核心支撐之一。它能夠助力人形機器人完成
3D視覺引導拆碼垛:一文讀懂“機器眼”如何指揮機器人搬貨?
3D視覺引導技術。很多入門者會好奇,這雙“眼睛”究竟如何看清貨物、精準定位,又能無縫指揮機器人完成動作?本文將拆解3D視覺“掃描識別-坐標定位-機器人聯動”的完整

基于3D視覺引導的移動式復合機器人設計:智能自動化革命的核心技術
潛力,推動智能自動化的未來發展。 關鍵詞: 3D視覺引導,移動式復合機器人,智能制造,機器人設計,視覺導航,復合機器人,機器人技術,智能自動

禾賽科技2025年割草機器人3D激光雷達出貨量第一
1 月 8 日,全球激光雷達領導者禾賽科技(NASDAQ: HSAI;HKEX: 2525)今日宣布,禾賽 2025 年割草機器人 3D 激光雷達出貨量第一,2026 CES 現場搭載 3D 激光雷達的割草
【應用方案】全場景落地!艾為芯讓人形機器人更“懂”世界
2025年,人形機器人加速從實驗室闖入現實。當特斯拉Optimus在工廠精準裝配零件、Figure機器人在酒店前臺從容接待賓客時,“人形機器人

奧比中光領跑韓國機器人3D視覺市場
近日,國際權威行業研究機構Interact Analysis發布《韓國商用及工業移動機器人3D視覺市場分析》報告(以下簡稱“報告”)。數據顯示,奧比中光在韓國商用和工業移動機器人3D視
NVIDIA 發布三大利器,推動人形機器人邁向新紀元
電子發燒友網綜合報道 在節前的機器人學習大會(CoRL)上,NVIDIA 發布了一系列突破性技術,包括開源物理引擎 Newton、機器人基礎模型 Isaac GROOT N1.6以及全新 AI
全球首次!人形機器人 24 小時自主行走
電子發燒友網綜合報道?近日,智元機器人宣布,該公司旗下的人形機器人?“遠征?A2”?完成了一場全球首次的?24?小時高溫環境下全自主行走挑戰。 ? 挑戰于?8?月?17?日?8:20?
發表于 08-25 08:29
?2095次閱讀
發力人形機器人賽道,傅利葉重磅推出陪伴機器人GR-3
8月6日,在北京舉辦的世界機器人大會上,上海傅利葉智能科技公司正式發布了首款主打交互陪伴、具備可觸摸特性的全尺寸人形機器人Care-bot GR3。此次發布的GR

成都華微一行走進成都人形機器人創新中心
近日,成都華微電子科技股份有限公司(以下簡稱“成都華微”)董事會秘書李春妍、SoC研發中心主任胡參、市場部部長車紅瑞一行走進成都人形機器人創新中心,雙方圍繞智能機器人核心技術展開深入交
構建人形機器人學習的合成運動生成流程
通用人形機器人需要能夠快速適應現有的以人類為中心的城市和工業工作空間,處理繁瑣、重復或體力要求高的任務。這些移動機器人經過設計,能在以人類為中心的環境中有出色的表現,從工廠車間到醫療醫療機構,它們的價值日益凸顯。

昨日,杭州3D視覺傳感器公司獲數億元融資!
2025年4月7日,杭州藍芯科技有限公司(以下簡稱“藍芯科技”)正式宣布完成由鯤鵬基金領投的C+輪融資,融資金額數億元。 目前藍芯科技產品涵蓋3D視覺傳感器、移動機器人、人形機器人、移

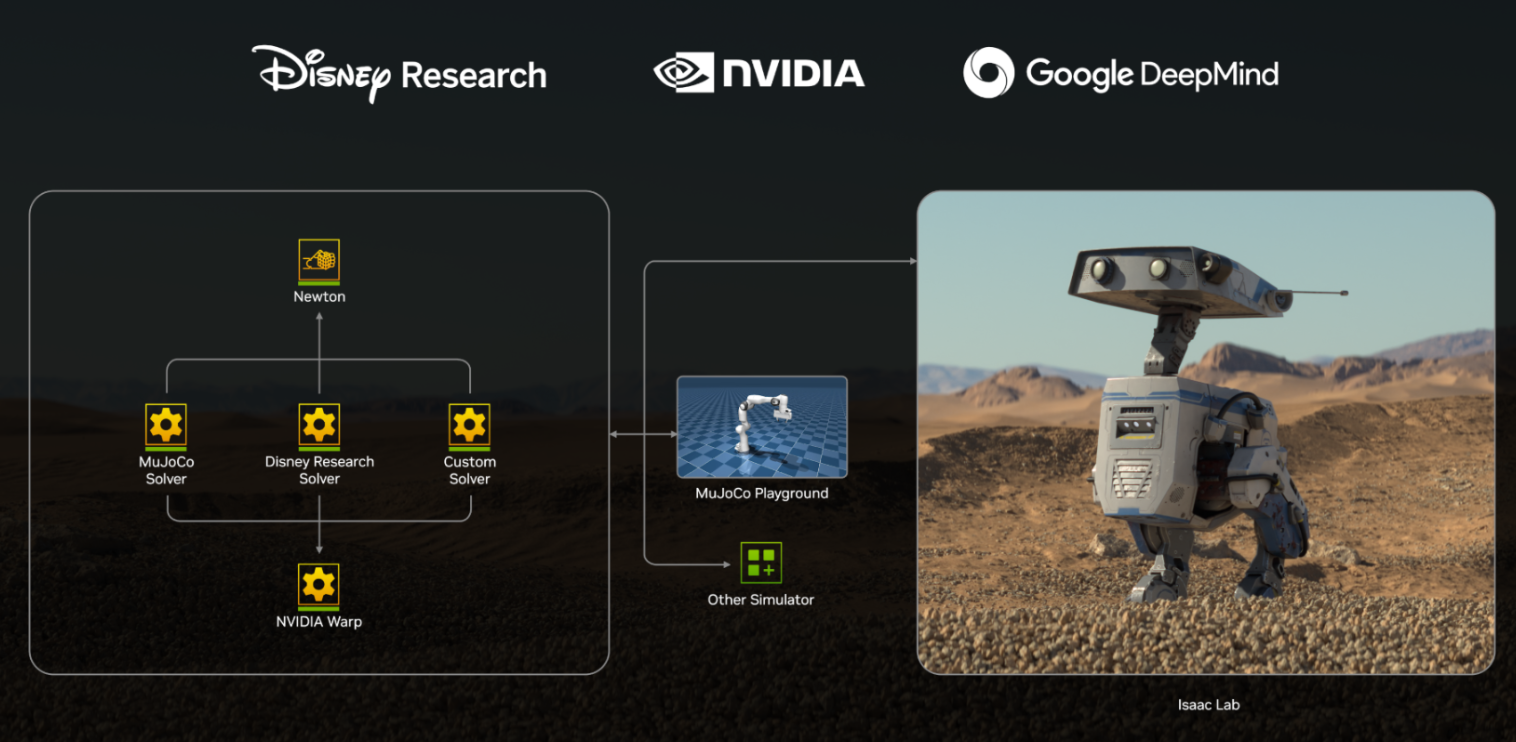
深度解讀英偉達Newton機器人平臺:技術革新與跨界生態構建
Newton是由NVIDIA、Google DeepMind和Disney Research開發的開源、可擴展的物理引擎,旨在推進機器人學習和開發。 Newton建立在 NVIDIA Warp
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型
GR00T N1以及新的數據生成和機器人學習框架,我們將共同開啟AI時代的新邊疆。” 黃仁勛還強調其泛化能力和多任務執行潛力?。 機器人Blue由英偉達公司、谷歌DeepMind、迪士尼聯合開發,行走動作流暢自然,聲音設計可愛
人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數如何設計?
我們正在研究人形機器人,想了解在關節驅動、電源管理、熱控制等子系統中使用功率器件(如MOSFET、IGBT、IPM)。目前遇到以下問題:
? 功率器件分布不明確 :不清楚哪些關鍵部位必須使用高功率
發表于 03-12 14:05



 工商網監
工商網監
評論