") RepPoints 比邊界框更好用的目標(biāo)檢測(cè)方法
RepPoints 比邊界框更好用的目標(biāo)檢測(cè)方法

來(lái)自北京大學(xué)、清華大學(xué)和微軟亞洲研究院的研究人員提出一種新的、更精細(xì)的對(duì)象表示方法RepPoints,拋棄了流行的邊界框表示,結(jié)果與最先進(jìn)的基于 anchor 的檢測(cè)方法同樣有效。
目標(biāo)檢測(cè)是計(jì)算機(jī)視覺中最基本的任務(wù)之一,也是許多視覺應(yīng)用的關(guān)鍵組成部分,包括實(shí)例分割、人體姿態(tài)分析、視覺推理等。
目標(biāo)檢測(cè)的目的是在圖像中定位目標(biāo),并提供目標(biāo)的類別標(biāo)簽。
近年來(lái),隨著深度神經(jīng)網(wǎng)絡(luò)的快速發(fā)展,目標(biāo)檢測(cè)問(wèn)題也取得了長(zhǎng)足的進(jìn)展。
當(dāng)前先進(jìn)的目標(biāo)檢測(cè)器很大程度上依賴于矩形邊界框來(lái)表示不同識(shí)別階段的對(duì)象,如 anchors、proposals 以及最終的預(yù)測(cè)。
邊界框使用方便,但它只提供目標(biāo)的粗略定位,導(dǎo)致對(duì)目標(biāo)特征的提取也相當(dāng)粗略。
近日,來(lái)自北京大學(xué)、清華大學(xué)和微軟亞洲研究院的楊澤、王立威、Shaohui Liu 等人在他們的最新論文中,提出了一種新的、更精細(xì)的對(duì)象表示方法 ——RepPoints (representative points),這是一組對(duì)定位和識(shí)別都很有用的樣本點(diǎn) (sample points)。

給定訓(xùn)練的 ground truth 定位和識(shí)別目標(biāo),RepPoints 學(xué)會(huì)自動(dòng)以限制目標(biāo)的空間范圍的方式來(lái)排列自己,并表示在語(yǔ)義上重要的局部區(qū)域。此外,RepPoints 不需要使用 anchor 來(lái)對(duì)邊界框的空間進(jìn)行采樣。
作者展示了一個(gè)基于 RepPoints 的、anchor-free 的目標(biāo)檢測(cè)器,不需要多尺度訓(xùn)練和測(cè)試就可以實(shí)現(xiàn),而且與最先進(jìn)的基于 anchor 的檢測(cè)方法同樣有效,在 COCO test-dev 檢測(cè)基準(zhǔn)上達(dá)到了42.8 AP 和 65.0 AP??。
拋棄邊界框,更細(xì)粒度的目標(biāo)表示RepPoints
在目標(biāo)檢測(cè)過(guò)程中,邊界框是處理的基本元素。邊界框描述了目標(biāo)檢測(cè)器各階段的目標(biāo)位置。
雖然邊界框便于計(jì)算,但它們僅提供目標(biāo)的粗略定位,并不完全擬合對(duì)象的形狀和姿態(tài)。因此,從邊界框的規(guī)則單元格中提取的特征可能會(huì)受到包含少量語(yǔ)義信息的背景內(nèi)容或無(wú)信息的前景區(qū)域的嚴(yán)重影響。這可能導(dǎo)致特征質(zhì)量降低,從而降低了目標(biāo)檢測(cè)的分類性能。
本文提出一種新的表示方法,稱為 RepPoints,它提供了更細(xì)粒度的定位和更方便的分類。
如圖 1 所示,RepPoints 是一組點(diǎn),學(xué)習(xí)自適應(yīng)地將自己置于目標(biāo)之上,其方式限定了目標(biāo)的空間范圍,并表示語(yǔ)義上重要的局部區(qū)域。

圖 1:RepPoints 是一種新的目標(biāo)檢測(cè)表示方法
RepPoints 的訓(xùn)練由目標(biāo)定位和識(shí)別目標(biāo)共同驅(qū)動(dòng),因此,RepPoints 與 ground-truth 的邊界框緊密相關(guān),并引導(dǎo)檢測(cè)器正確地分類目標(biāo)。
這種自適應(yīng)、可微的表示可以在現(xiàn)代目標(biāo)檢測(cè)器的不同階段連貫地使用,并且不需要使用 anchors 來(lái)對(duì)邊界框空間進(jìn)行采樣。
RepPoints 不同于用于目標(biāo)檢測(cè)現(xiàn)有的非矩形表示,它們都是以自底向上的方式構(gòu)建的。這些自底向上的表示方法會(huì)識(shí)別單個(gè)的點(diǎn) (例如,邊界框角或?qū)ο蟮哪┒?。此外,它們的表示要么像邊界框那樣仍然是軸對(duì)齊的,要么需要 ground truth 對(duì)象掩碼作為額外的監(jiān)督。
相反,RepPoints 是通過(guò)自頂向下的方式從輸入圖像 / 對(duì)象特征中學(xué)習(xí)的,允許端到端訓(xùn)練和生成細(xì)粒度的定位,而無(wú)需額外的監(jiān)督。
為了證明 RepPoints 表示的強(qiáng)大能力,我們提出了一種基于可變形 ConvNets 框架的實(shí)現(xiàn),該框架在保證特征提取方便的同時(shí),提供了適合指導(dǎo)自適應(yīng)采樣的識(shí)別反饋。
我們發(fā)現(xiàn),這個(gè)無(wú) anchor 的檢測(cè)系統(tǒng)在對(duì)目標(biāo)進(jìn)行精確定位的同時(shí),具有較強(qiáng)的分類能力。在沒(méi)有多尺度訓(xùn)練和測(cè)試的情況下,我們的檢測(cè)器在 COCO 基準(zhǔn)上實(shí)現(xiàn)了 42.8 AP 和 65.0 AP?? 的精度,不僅超過(guò)了所有現(xiàn)有的 anchor-free 檢測(cè)器,而且性能與最先進(jìn)的 anchor-based 的基線模型相當(dāng)。
RepPoints vs 邊界框
本節(jié)將描述 RepPoints,以及它與邊界框的區(qū)別。
邊界框表示
邊界框是一個(gè) 4-d 表示,編碼目標(biāo)的空間位置,即 B = (x, y, w, h), x, y 表示中心點(diǎn),w, h 表示寬度和高度。
由于其使用簡(jiǎn)單方便,現(xiàn)代目標(biāo)檢測(cè)器嚴(yán)重依賴于邊界框來(lái)表示檢測(cè) pipeline 中各個(gè)階段的對(duì)象。
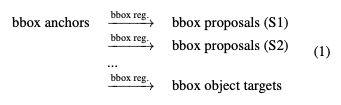
性能最優(yōu)的目標(biāo)檢測(cè)器通常遵循一個(gè) multi-stage 的識(shí)別范式,其中目標(biāo)定位是逐步細(xì)化的。其中,目標(biāo)表示的角色如下:
RepPoints
如前所述,4-d 邊界框是目標(biāo)位置的一個(gè)粗略表示。邊界框表示只考慮目標(biāo)的矩形空間范圍,不考慮形狀、姿態(tài)和語(yǔ)義上重要的局部區(qū)域的位置,這些可用于更好的定位和更好的目標(biāo)特征提取。
為了克服上述限制,RepPoints 轉(zhuǎn)而對(duì)一組自適應(yīng)樣本點(diǎn)進(jìn)行建模:

其中 n 為表示中使用的樣本點(diǎn)的總數(shù)。在這項(xiàng)工作中,n 默認(rèn)設(shè)置為 9。
Learning RepPoints
RepPoints 的學(xué)習(xí)是由目標(biāo)定位損失和目標(biāo)識(shí)別損失共同驅(qū)動(dòng)的。為了計(jì)算目標(biāo)定位損失,我們首先用一個(gè)轉(zhuǎn)換函數(shù) T 將 RepPoints 轉(zhuǎn)換為偽框 (pseudo box)。然后,計(jì)算轉(zhuǎn)換后的偽框與 ground truth 邊界框之間的差異。
圖 3 顯示,當(dāng)訓(xùn)練由目標(biāo)定位損失和目標(biāo)識(shí)別損失組合驅(qū)動(dòng)時(shí),目標(biāo)的極值點(diǎn)和語(yǔ)義關(guān)鍵點(diǎn)可以自動(dòng)學(xué)習(xí)。
圖 3: 學(xué)習(xí)的 RepPoints 的可視化和來(lái)自 COCO minival set 的幾個(gè)例子的檢測(cè)結(jié)果。通常,學(xué)習(xí)的 RepPoints 位于目標(biāo)的端點(diǎn)或語(yǔ)義關(guān)鍵點(diǎn)上。
RPDet: 無(wú)需 Anchor 的目標(biāo)檢測(cè)器
我們?cè)O(shè)計(jì)了一種不使用 anchor 的對(duì)象檢測(cè)器,它利用 RepPoints 代替邊界框作為基本表示。
目標(biāo)表示的演化過(guò)程如下:
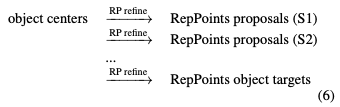
RepPoints Detector (RPDet) 由兩個(gè)基于可變形卷積的識(shí)別階段構(gòu)成,如圖 2 所示。

圖 2:RPDet (RepPoints detector) 的概覽,以特征金字塔網(wǎng)絡(luò) (FPN) 為主干
可變形卷積與 RepPoints 很好地結(jié)合在一起,因?yàn)樗木矸e是在一組不規(guī)則分布的采樣點(diǎn)上計(jì)算的,反之,它的識(shí)別反饋可以指導(dǎo)訓(xùn)練這些點(diǎn)的定位。
實(shí)驗(yàn)和結(jié)果

表 1:目標(biāo)檢測(cè)中 RepPoints 與邊界框表示的比較。除了處理給定的目標(biāo)表示之外,網(wǎng)絡(luò)結(jié)構(gòu)是相同的。
從表 1 可以看出,將目標(biāo)表示從邊界框變?yōu)?RepPoints,可以帶來(lái)一定程度的性能提升,如使用 ResNet-50 作為主干網(wǎng)絡(luò)時(shí)提升了 2.1 mAP,使用 ResNet-101 時(shí)提升了 2.0 mAP。這表明相對(duì)于邊界框,RepPoints 表示在對(duì)象檢測(cè)方面具有優(yōu)勢(shì)。

表 7:將所提出的 RPDet 與 COCO test-dev 上最先進(jìn)的檢測(cè)器進(jìn)行比較。
如表 7 所示,在沒(méi)有 multi-scale 訓(xùn)練和測(cè)試的情況下,所提出的框架使用 ResNet-101-DCN 主干網(wǎng)絡(luò)實(shí)現(xiàn)了 42.8 AP,與基于 anchor 的 Cascade R-CNN 方法相當(dāng),性能優(yōu)于現(xiàn)有的所有不采用 anchor 的檢測(cè)器。此外,RPDet 獲得了 65.0 的 AP??,大大超過(guò)了所有基線。
-
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
233瀏覽量
16492
原文標(biāo)題:北大、清華、微軟聯(lián)合提出RepPoints,比邊界框更好用的目標(biāo)檢測(cè)方法
文章出處:【微信號(hào):aicapital,微信公眾號(hào):全球人工智能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
Anyty(艾尼提)便攜式顯微鏡如何重塑工業(yè)檢測(cè)新邊界

光伏廠長(zhǎng)必看:層壓框錯(cuò)位難題,終于有了省錢解法!

單板挑戰(zhàn)4路YOLOv8!米爾瑞芯微RK3576開發(fā)板性能實(shí)測(cè)
3D 線激光輪廓測(cè)量?jī)x在手機(jī)中框檢測(cè)的應(yīng)用:細(xì)節(jié)深化與技術(shù)解析

突破邊界:先進(jìn)封裝時(shí)代下光學(xué)檢測(cè)技術(shù)的創(chuàng)新演進(jìn)

氣密性檢測(cè)儀的核心應(yīng)用范疇及其所針對(duì)的檢測(cè)目標(biāo)

YOLOv8水果檢測(cè)示例代碼換成640輸入圖像出現(xiàn)目標(biāo)框繪制錯(cuò)誤的原因 ?
基于LockAI視覺識(shí)別模塊:C++目標(biāo)檢測(cè)
基于LockAI視覺識(shí)別模塊:C++目標(biāo)檢測(cè)

手機(jī)中框氣密性檢測(cè)儀的使用方法
阿童木雙張檢測(cè)器好不好用?用數(shù)據(jù)和場(chǎng)景說(shuō)話



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論