 意大利理工學院的Centauro團隊開發出一款半人馬機器人
意大利理工學院的Centauro團隊開發出一款半人馬機器人

據悉,意大利理工學院(IIT)的Centauro團隊開發出一款半人馬機器人Centauro,該機器人由一個人形機器人和一個四足機器人構成,即:將一個人形機器人的上半身安裝在一個四足機器人的下半身之上,從而組成一個類似于半人馬的機器人。
Centauro高1.5m、重93kg,外殼由輕金屬及3D打印塑料制成,機身內部配有3臺計算機,可處理感知、控制和運動規劃等多種需求。同時,Centauro支持遠程遙控和半自動操作,在通信中斷或延遲的情況下,機載電腦可以自行預測機器人該如何移動。
Centauro的雙臂可以舉起約11kg的重物,與成年人的操控強度和靈活性相當,也可以表演“空手道劈木板”。
Centauro的下半身采用輪、腿混合動力驅動。其腿部有6個自由度,可以通過旋轉和伸展臀部、膝蓋和腳踝來實現關節的運動,同時,其還可以采用不同的配置,比如:四足機器人典型的腿部配置,包括內、外膝關節,以及蜘蛛腿的配置,這樣的設計更有利于機器人操縱大型工具。Centauro底部的輪子由鋁合金制成,外層用彈性體材料進行過模,保證了粘阻尼接觸,以及在地面上滾動時產生適當的摩擦。
“半人馬”設計不僅優化了Centauro的穩定性、靈活性和移動性,而且遠程操作人員可以更直觀、更有效地控制機器人的臂膀和手。
下一步,研究團隊將對Centauro進行升級,希望機器人能勝任越來越復雜的移動操作任務,比如災難救援;不斷提高自主完成任務的能力,提高整體工作效率,實現在最少操縱者環境下的效率最大化。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31310瀏覽量
223361 -
3D打印
+關注
關注
28文章
3648瀏覽量
118608
原文標題:意大利大學打造半人馬機器人
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
廣州團隊研制出機器人“觸覺皮膚”
機器人的發展日新月異,廣州團隊研制出機器人“觸覺皮膚”!廣州團隊研制的亞毫米級雙模態觸覺傳感器陣列,是機器人觸覺技術發展的重要里程碑,它不僅
江智機器人技術核心團隊
?江智機器人技術核心團隊是基于江智原有15年以上車輛產品研發團隊基礎上,以美國卡耐基梅隆大學CMU留學回國的趙國江為核心,匯聚了一批來自人工智能、機

從講義到學院:錢學森1963年的“星際藍圖”與2026年的現實回響
歷史的坐標:1961年的講臺與2026年的揭牌1961年秋,中國科學技術大學近代力學系的教室里,錢學森先生拿起了粉筆。在接下來的幾個月里,他將自己在美國加州理工學院和麻省理工學院積累的深厚學識

東莞理工學院“小眼睛科技杯”第四屆集成電路設計與創新應用競賽圓滿落幕
BASEDINNOVATION“小眼睛科技杯”集成電路設計與創新應用競賽2025年11月23日,東莞理工學院第四屆集成電路設計與創新應用競賽于學術會議中心圓滿落幕。本屆競賽由校團委、學生工作部

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
,已經成為機器人開發者不容忽視的核心處理器。而米爾電子的MYD-LR3576開發板,則以其豐富的接口、穩定的性能和成熟的軟硬件支持,為快速原型驗證和產品開發提供了絕佳的平臺。如果您正在
發表于 10-29 16:41
格羅方德與新加坡理工學院簽署諒解備忘錄
2025年10月15日,格羅方德新加坡公司(GlobalFoundries Singapore,簡稱GFS)與新加坡理工學院(Singapore Polytechnic,簡稱SP)簽署了一份諒解備忘錄,旨在就新加坡半導體行業的數字人才培養展開合作。
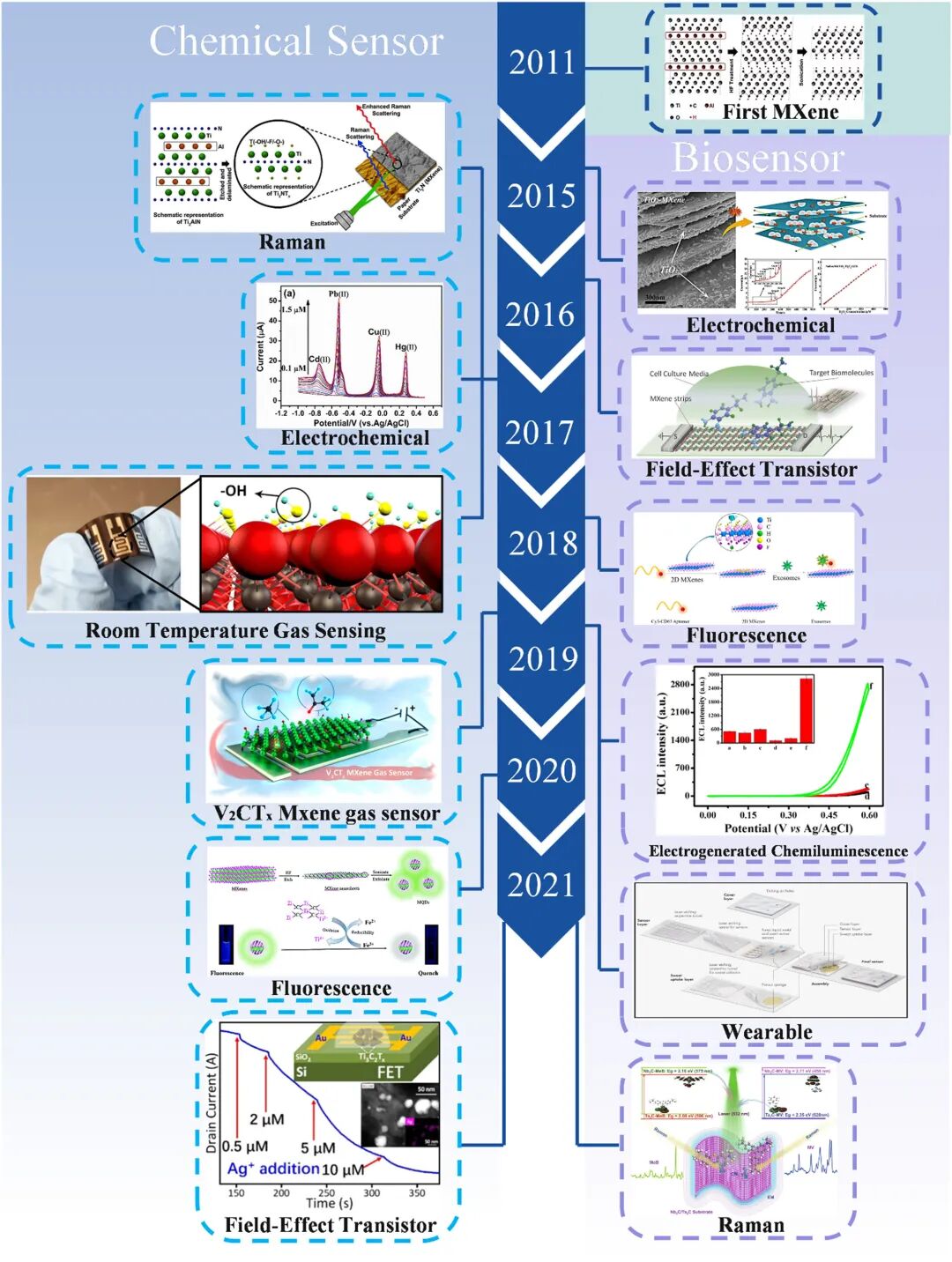
蘇黎世聯邦理工學院、西南交通大學:關于研究MXenes-環境生化傳感平臺新型材料
近日, 蘇黎世聯邦理工學院王京課題組 聯合 西南交通大學趙志俊課題組 及 四川大學張傳芳課題組 ,在 高起點新刊Electron 發表了題為“MXenes: Emerging Materials
Wolfspeed與紐約州立大學理工學院加強教育研究合作
紐約州立大學理工學院(SUNY Poly)在 近日舉行的新聞發布會上宣布,任命兩名教職人員為 Wolfspeed 捐贈講席教授(Wolfspeed Endowed Chairs),標志著該校研究擴展的重要里程碑。
突破麻省理工學院技術壟斷,深圳傳感器公司帶來全新機器人觸覺傳感器技術
近日 戴盟機器人CEO段江嘩 赴亞特蘭大參加 2025 IEEE國際機器人 與自動化大會(ICRA 2025) 顧不上時差帶來的疲憊感 他一下飛機 就投入到籌備工作中 在這次海外首秀上 這家深企帶來

偉創力與麻省理工學院 (MIT) 就其全新的“新制造倡議”(INM) 達成戰略合作
行業巨擘+全球頂級學府? 近日,偉創力與 麻省理工學院? (MIT) 就其 全新的“新制造倡議”(INM) 達成戰略合作 。作為INM行業聯盟的 創始成員 ,偉創力將在這一項目中與MIT的研究人員
麻省理工學院香港校友會代表團到訪華沿機器人
近日,麻省理工學院香港校友會(MIT Club of Hong Kong)代表團40余人到訪華沿機器人總部,通過展廳參觀、技術交流與座談研討,深入了解國產機器人產業發展現狀,并就“機器人
美國加州理工學院:研究量子傳感技術可實現粒子時空高精度探測
《儀器儀表期刊》發表。 ? 答案可能就在量子傳感器中。來自美國能源部費米國家加速器實驗室(費米實驗室)、加州理工學院、美國國家航空航天局噴氣推進實驗室(由加州理工學院管理)和其他合作機構的研究人員開發出了
華為與沈陽工學院聯合發布ICT人才培養全球樣板點
沈陽工學院聯合華為技術有限公司(以下簡稱“華為”)成功舉辦數智時代新質生產力人才培養高質量發展研討會。本次研討會邀請500余位教育行業領袖、專家學者、合作伙伴和媒體嘉賓出席,聚焦產教融合新思路
佐治亞理工學院:毛囊級傳感器!研發可運動無感佩戴的AR控制傳感器
? 佐治亞理工學院的研究人員開發了一種幾乎難以察覺的微結構大腦傳感器,有望使腦機接口(BCI)技術真正融入日常生活。 傳統BCI系統依賴貼附在頭皮上的電極和凝膠,存在設備龐大、使用不適等問題,而侵入



 工商網監
工商網監
評論