 Xilinx SDK的全面高級概述
Xilinx SDK的全面高級概述

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
賽靈思
+關注
關注
33文章
1798瀏覽量
133425 -
可編程器件
+關注
關注
2文章
60瀏覽量
21373 -
SDK
+關注
關注
3文章
1101瀏覽量
51713
發布評論請先 登錄
相關推薦
熱點推薦

重磅升級!迅為iTOP-Hi3403開發板SDK全面升級至Linux?6.6內核
【重磅升級!迅為iTOP-Hi3403開發板SDK全面升級至Linux?6.6內核】
Xilinx FPGA串行通信協議介紹
Xilinx FPGA因其高性能和低延遲,常用于串行通信接口設計。本文深入分析了Aurora、PCI Express和Serial RapidIO這三種在Xilinx系統設計中關鍵的串行通信協議。介紹了它們的特性、優勢和應用場景,以及如何在不同需求下選擇合適的協議。
深度技術解析nRF Connect SDK裸機選項方案
nRF Connect SDK裸機選項是nRF Connect SDK 環境中新增的替代開發路徑,支持在nRF54L系列上進行單線程裸機低功耗藍牙應用開發。該選項專為開發簡單低功耗藍牙應用的開發者
發表于 10-31 23:11
提供SDK和API接口的手持終端廠家推薦
想采購手持終端?本文為您推薦多家 可提供SDK和API接口的手持終端廠家,幫助企業快速實現系統對接、降低開發成本,適配物流、電商、醫療、制造等行業應用。

SDK音頻替換失敗記錄過程
在安信可離線語音模組 VC-01、VC-02 系列教程 【中級入門篇】中根據設置的不同回復詞和命令字進行了固件生成。我出教程的時候在考慮有沒有什么辦法來替換到SDK中的音頻,在我嘗試了各種辦法后發現很難辦到 (建議直接使用云平臺生成。 不要在SDK里手動添加, 容易匹配不

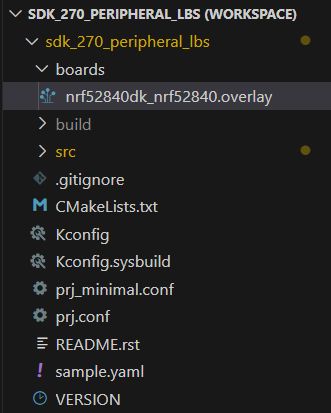
nRF Connect SDK Basic
用戶在使用 nRF connect SDK 的時候經常會操作的外設有GPIO,I2C,SPI,UART。我們就以 nRF connect SDK 2.7.0 中的例程代碼
Nordic nRF5 SDK和softdevice介紹
SDK和Softdevice的區別是什么?怎么選擇SDK和softdevice版本?芯片,SDK和softdevice有沒有版本兼容問題?怎么理解SDK目錄結構?
NVIDIA Jetson + Isaac SDK 人形機器人方案全面解析
NVIDIA Jetson + Isaac SDK 人形機器人方案全面解析 一、方案概述 Jetson 硬件平臺 :提供 AI + GPU 運算能力,配合多傳感器、視覺、傳動控制體系 Isaac
NVIDIA Jetson + Isaac SDK 在人形機器人領域的方案詳解
NVIDIA Jetson + Isaac SDK 在人形機器人領域的 方案詳解 ,涵蓋芯片型號、軟件平臺、開發工具鏈、應用場景與典型客戶等。 一、方案概述:Jetson + Isaac SDK
如何調試nRF5 SDK
本文將講述Nordic nRF5 SDK的主要調試手段,以幫助大家快速定位問題,并解決問題。一般來說,你可以通過打log方式,IDE的debug模式,SDK自帶的app_error_check函數
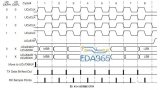
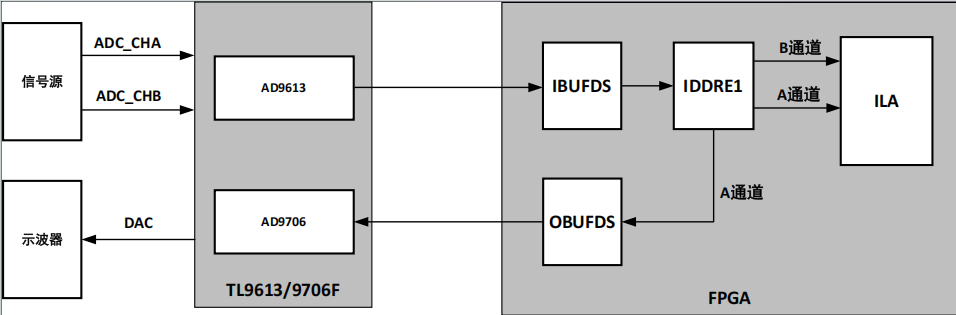
基于AD9613與Xilinx MPSoC平臺的高速AD/DA案例分享
本文主要介紹基于Xilinx UltraScale+MPSoC XCZU7EV的高速AD采集與高速DA輸出案例
Xilinx Shift RAM IP概述和主要功能
Xilinx Shift RAM IP 是 AMD Xilinx 提供的一個 LogiCORE IP 核,用于在 FPGA 中實現高效的移位寄存器(Shift Register)。該 IP 核利用
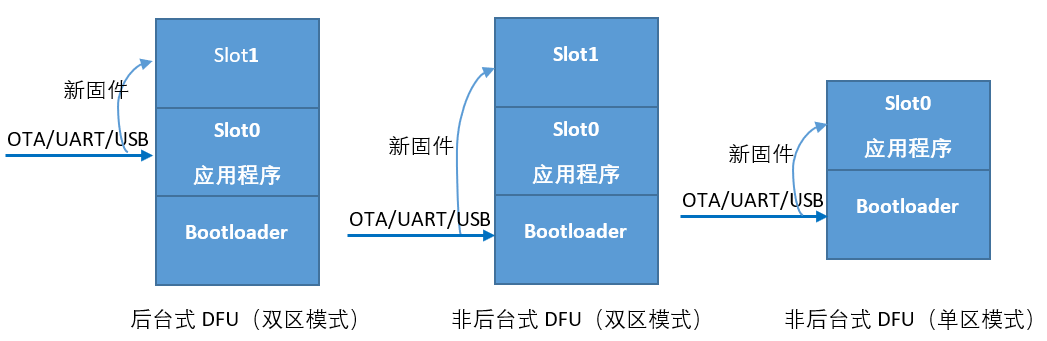
nRF Connect SDK(NCS)/Zephyr固件升級詳解 – 重點講述MCUboot和藍牙空中升級
可能變磚?本文將對以上問題進行闡述。 目錄 1.概述 2. NCS中的Bootloader 2.1 nRF5 SDK Bootloader 2.2 MCUboot 2.3 B0,亦稱nRF Secure Immutable Bootloader(NSIB) 3. DFU協



 工商網監
工商網監
評論