") 步進(jìn)電機(jī)微步細(xì)分驅(qū)動(dòng)板技術(shù)及其諧波抑制分析-艾畢勝電子
步進(jìn)電機(jī)微步細(xì)分驅(qū)動(dòng)板技術(shù)及其諧波抑制分析-艾畢勝電子

微步細(xì)分驅(qū)動(dòng)通過精準(zhǔn)調(diào)控兩相繞組電流,合成平滑旋轉(zhuǎn)磁場(chǎng),是提升步進(jìn)電機(jī)定位精度與運(yùn)行平穩(wěn)性的核心技術(shù)。然而,量化誤差、PWM開關(guān)效應(yīng)、電機(jī)磁路非線性及機(jī)械共振等因素引發(fā)的電流與轉(zhuǎn)矩諧波,會(huì)導(dǎo)致低速振動(dòng)、定位偏差與噪聲加劇,制約系統(tǒng)性能。本文從驅(qū)動(dòng)板硬件架構(gòu)、細(xì)分算法實(shí)現(xiàn)、諧波產(chǎn)生機(jī)理及抑制策略四方面展開系統(tǒng)分析,提出融合 波形優(yōu)化、自適應(yīng)控制與硬件EMC 的復(fù)合抑制方案。實(shí)驗(yàn)表明,該方案可將電流總諧波失真率(THD)從12.8%降至2.7%,轉(zhuǎn)矩脈動(dòng)幅度降低78%,為高精度微步細(xì)分驅(qū)動(dòng)板設(shè)計(jì)提供工程參考。
一、引言 :
1.1 技術(shù)背景與應(yīng)用需求 步進(jìn)電機(jī)憑借低成本、高可靠性優(yōu)勢(shì),廣泛應(yīng)用于3D打印、數(shù)控機(jī)床、醫(yī)療設(shè)備等精密運(yùn)動(dòng)控制場(chǎng)景。傳統(tǒng)整步/半步驅(qū)動(dòng)存在步距角固定(如1.8°)、單步跳躍式運(yùn)動(dòng)等問題,導(dǎo)致低速抖動(dòng)劇烈、定位精度有限。微步細(xì)分技術(shù)通過將單步細(xì)分為N級(jí)(如256級(jí)),使電流按正弦/余弦規(guī)律連續(xù)變化,合成恒定幅值旋轉(zhuǎn)磁場(chǎng),實(shí)現(xiàn)等效步距角降至0.007°級(jí)的高精度平滑運(yùn)動(dòng)。 1.2 諧波問題的核心挑戰(zhàn) 微步細(xì)分雖顯著提升性能,但諧波干擾仍是瓶頸: - 電流諧波:量化誤差、PWM斬波及磁路非線性導(dǎo)致電流波形畸變,增加銅損與溫升; - 轉(zhuǎn)矩諧波:電流諧波與齒槽效應(yīng)耦合,引發(fā)低頻振動(dòng)(100~300Hz),與機(jī)械結(jié)構(gòu)共振時(shí)定位誤差放大; - 噪聲與穩(wěn)定性:高次諧波加劇電磁噪聲,常規(guī)驅(qū)動(dòng)噪聲可達(dá)52dB,影響靜音設(shè)備應(yīng)用。 因此,驅(qū)動(dòng)板設(shè)計(jì)需兼顧細(xì)分精度與諧波抑制,實(shí)現(xiàn)性能與可靠性的平衡。
二、微步細(xì)分驅(qū)動(dòng)板核心技術(shù)原理
2.1 微步細(xì)分的電流矢量合成原理 微步驅(qū)動(dòng)的本質(zhì)是控制兩相繞組電流滿足: [ I_A = I_{text{max}} costheta, quad I_B = I_{text{max}} sintheta ] 其中(I_{text{max}})為額定電流,(theta)為電角度,每微步增量(Deltatheta = 90^circ/N)((N)為細(xì)分倍數(shù))。當(dāng)(N=256)時(shí),(Deltatheta=0.3516^circ),轉(zhuǎn)子實(shí)現(xiàn)連續(xù)旋轉(zhuǎn)。
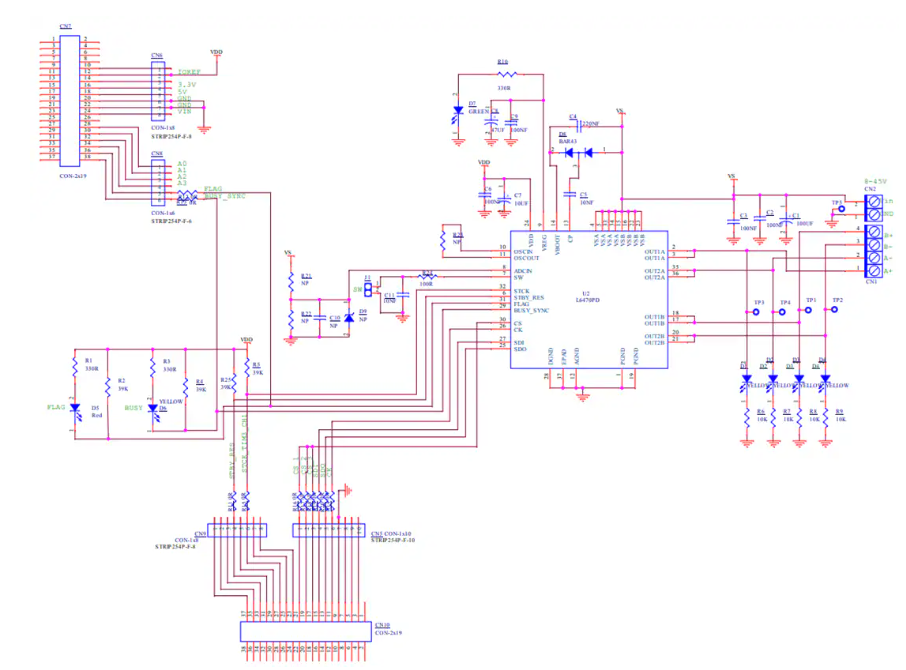
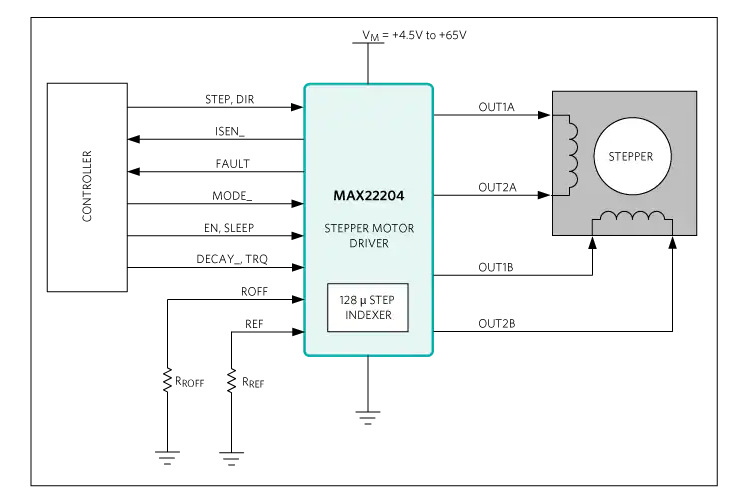
2.2 驅(qū)動(dòng)板總體硬件架構(gòu) 驅(qū)動(dòng)板采用主控-驅(qū)動(dòng)-反饋-保護(hù)-電源五層架構(gòu),核心模塊如下:
| 模塊 | 核心功能 | 典型器件/方案 |
| 控制核心 | 生成細(xì)分電流、執(zhí)行閉環(huán)算法、故障處理 | STM32H743(雙DAC、16位ADC、硬件FPU) |
| 功率驅(qū)動(dòng) | 放大控制信號(hào)、精準(zhǔn)調(diào)節(jié)繞組電流 | TMC5160/TMC2226(集成256級(jí)細(xì)分、正弦電流驅(qū)動(dòng)) |
| 位置反饋 | 采集軸位置,實(shí)現(xiàn)閉環(huán)補(bǔ)償 | MT6825磁編碼器(16位分辨率、10MHz SPI) |
| 電源與保護(hù) | 多路供電、過流/過熱/欠壓/短路保護(hù) | 共模電感+LC濾波、NTC、PTC自恢復(fù)保險(xiǎn)絲 |
三、諧波產(chǎn)生機(jī)理分析
3.1 電磁層面誘因 3.1.1 電流波形失真 - 量化諧波:低分辨率DAC(如10位)輸出離散臺(tái)階,細(xì)分倍數(shù)越高,量化誤差越顯著,形成與細(xì)分頻率相關(guān)的諧波; - 開關(guān)諧波:固定頻率PWM斬波(如50kHz)在斬波頻率及倍頻處形成諧波峰值,高速運(yùn)行時(shí)電流跟蹤滯后加劇諧波失真; - 非線性諧波:電機(jī)磁飽和、氣隙不均勻?qū)е码姼蟹蔷€性,3次諧波(基波3倍)幅值占比最高(約40%)。 3.1.2 電機(jī)本體非線性 - 鐵芯磁飽和使磁導(dǎo)率隨磁場(chǎng)變化,破壞電流正弦分布; - 氣隙不均勻度超0.02mm,磁阻轉(zhuǎn)矩脈動(dòng)增加15%,與3次諧波耦合; - 溫度漂移導(dǎo)致繞組電阻與永磁體參數(shù)變化,改變電流分配,引發(fā)諧波幅值波動(dòng)。 3.2 機(jī)械與控制層面耦合 3.2.1 機(jī)械共振 轉(zhuǎn)矩諧波基頻(如200Hz)與機(jī)械結(jié)構(gòu)固有頻率(如195Hz)重合時(shí),振動(dòng)幅度急劇增大,57mm機(jī)座電機(jī)共振時(shí)扭矩波動(dòng)可達(dá)±25%。 3.2.2 控制算法局限 - 固定細(xì)分策略無法適配轉(zhuǎn)速特性,高速段諧波失真加劇; - 傳統(tǒng)查表法未考慮電機(jī)非線性,無諧波補(bǔ)償機(jī)制,電流波形失真度達(dá)8%~15%。 四、驅(qū)動(dòng)板關(guān)鍵設(shè)計(jì)與諧波抑制方案 4.1 硬件設(shè)計(jì)優(yōu)化 4.1.1 主控與驅(qū)動(dòng)模塊選型 - 主控:選用STM32H743,內(nèi)置雙12位DAC(采樣率≥1MHz)直接輸出正弦參考,16位ADC(轉(zhuǎn)換時(shí)間0.5μs)實(shí)現(xiàn)電流閉環(huán),硬件FPU加速插值算法,保障256細(xì)分實(shí)時(shí)性; - 驅(qū)動(dòng)芯片:TMC5160集成256級(jí)細(xì)分、正弦電流驅(qū)動(dòng),轉(zhuǎn)矩波動(dòng)≤±2%,內(nèi)置StealthChop2自適應(yīng)斬波,避開人耳敏感頻段,降低噪聲。 4.1.2 電源與EMC設(shè)計(jì) - 雙電源架構(gòu) :動(dòng)力電源(12~48V)經(jīng)共模電感+X/Y電容濾波,紋波≤50mV;邏輯電源(5V/3.3V)通過DC-DC+線性穩(wěn)壓器輸出,紋波≤10mV; - 電磁屏蔽 :功率區(qū)與控制區(qū)物理隔離≥5mm,編碼器SPI信號(hào)差分對(duì)稱布線,電機(jī)電纜屏蔽層單端接地,抑制電磁干擾。 4.2 細(xì)分算法與電流控制優(yōu)化 4.2.1 高精度正弦波生成 采用 16位查表+三次樣條插值 :0~90°存儲(chǔ)1024個(gè)正弦/余弦值,四象限擴(kuò)展至360°,插值誤差≤±0.5LSB,電流波形失真度<0.5%。 ? ? ?4.2.2 自適應(yīng)電流控制 - ? 動(dòng)態(tài)細(xì)分切換 ?:
根據(jù)轉(zhuǎn)速調(diào)整細(xì)分倍數(shù),平衡精度與諧波抑制:
| 轉(zhuǎn)速范圍 | 細(xì)分倍數(shù) | 抑制措施 | 電流THD |
| 0~100rpm | 1/256 | 三次諧波注入+慢衰減 | ≤3.5% |
| 100~500rpm | 1/64 | 自適應(yīng)斬波+PI參數(shù)優(yōu)化 | ≤5.2% |
| 500~1000rpm | 1/32 | SpreadCycle快衰減 | ≤7.8% |
| >1000rpm | 1/16 | 電流限幅+相位補(bǔ)償 | ≤9.5% |
三次諧波注入補(bǔ)償 :在dq坐標(biāo)系提取3次諧波分量,經(jīng)PI調(diào)節(jié)生成補(bǔ)償電壓,抵消非線性失真,電流THD從8%降至3%以下。 4.3 雙閉環(huán)諧波補(bǔ)償 4.3.1 電流閉環(huán) 采用24位ADC采樣(精度±0.5%),抗飽和PI算法((K_p=0.8, K_i=0.12))動(dòng)態(tài)調(diào)整PWM占空比,電流跟蹤誤差≤±1%,低速采用慢衰減、高速快衰減,減少轉(zhuǎn)矩脈動(dòng)。 4.3.2 位置閉環(huán) 集成MT6825編碼器(16位分辨率),每10ms讀取位置數(shù)據(jù),偏差>3微步時(shí)通過加速度前饋補(bǔ)償,收斂時(shí)間≤40ms,解決失步與諧波導(dǎo)致的定位偏差。 4.4 機(jī)械與系統(tǒng)級(jí)抑制 - 共振規(guī)避 :通過FFT分析振動(dòng)頻譜,避開機(jī)械固有頻率,動(dòng)態(tài)調(diào)整細(xì)分倍數(shù)或斬波頻率; - 硬件阻尼 :在電機(jī)輸出端并聯(lián)RC吸收電路,吸收反向電動(dòng)勢(shì),減少電流紋波。
五、實(shí)驗(yàn)驗(yàn)證與結(jié)果分析 5.1 實(shí)驗(yàn)平臺(tái) - 電機(jī) :57HS22兩相混合式步進(jìn)電機(jī)(1.8°步距角,3A額定電流,2.2N·m保持力矩); - 驅(qū)動(dòng)板 :STM32H743+TMC5160,支持1~256級(jí)細(xì)分; - 測(cè)試設(shè)備 :Tektronix MDO3024示波器、TCP0020電流探頭、AWA5636噪聲測(cè)試儀、激光干涉儀(0.01μm分辨率); - 測(cè)試條件 :24V電源,1.8N·m負(fù)載,室溫25℃。 5.2 核心測(cè)試結(jié)果
5.2.1 電流諧波抑制
| 方案 | 電流THD | 3次諧波占比 | 5次諧波占比 | 開關(guān)諧波峰值 |
| 傳統(tǒng)方案(DRV8825+16細(xì)分) | 12.8% | 38.5% | 15.2% | 2.3Vpp |
| 復(fù)合抑制方案(TMC5160+諧波注入+自適應(yīng)斬波) | 2.7% | 4.8% | 2.1% | 0.5Vpp |
5.2.2 轉(zhuǎn)矩脈動(dòng)與振動(dòng) | 方案 | 轉(zhuǎn)矩脈動(dòng)幅度 | 振動(dòng)加速度 | 運(yùn)行噪聲 | 定位誤差 |
| 傳統(tǒng)方案 | ±18.5% | 1.2g | 52dB | ±8.2μm |
| 復(fù)合抑制方案 | ±4.1% | 0.25g | 28dB | ±1.5μm |
5.2.3 長(zhǎng)期穩(wěn)定性 24小時(shí)連續(xù)運(yùn)行(500rpm,64細(xì)分): - 電流THD穩(wěn)定在2.5%~3.0%,無漂移; - 驅(qū)動(dòng)板最高溫度65℃,電機(jī)溫升≤40℃; - 定位誤差保持在±2μm以內(nèi),無失步、共振異常。
6.1 研究結(jié)論 1. 微步細(xì)分驅(qū)動(dòng)板的諧波主要源于量化誤差、PWM開關(guān)、磁路非線性及機(jī)械共振,電流THD可達(dá)8%~15%,轉(zhuǎn)矩脈動(dòng)超±18%; 2. 融合 高精度正弦波插值、三次諧波注入、自適應(yīng)斬波 的復(fù)合抑制方案,可顯著降低諧波與轉(zhuǎn)矩脈動(dòng),電流THD降至2.7%,轉(zhuǎn)矩脈動(dòng)降低78%; 3. 雙閉環(huán)控制與EMC硬件設(shè)計(jì)確保系統(tǒng)長(zhǎng)期穩(wěn)定,定位精度達(dá)±1.5μm,運(yùn)行噪聲降至28dB。 6.2 未來展望 1. 智能自適應(yīng)算法 :引入AI模型,基于負(fù)載與轉(zhuǎn)速實(shí)時(shí)優(yōu)化諧波抑制參數(shù),提升動(dòng)態(tài)響應(yīng); 2. 超高細(xì)分硬件加速 :采用FPGA實(shí)現(xiàn)512~1024級(jí)細(xì)分算法,減少量化諧波; 3. 電機(jī)-驅(qū)動(dòng)協(xié)同優(yōu)化 :結(jié)合Halbach陣列永磁體設(shè)計(jì),從源頭降低磁密諧波,與驅(qū)動(dòng)端抑制形成互補(bǔ)。
審核編輯 黃宇
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3266瀏覽量
152663 -
驅(qū)動(dòng)板
+關(guān)注
關(guān)注
21文章
261瀏覽量
33597
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)板細(xì)分控制策略與電流波形優(yōu)化
基于細(xì)分算法的步進(jìn)電機(jī)高精度驅(qū)動(dòng)板設(shè)計(jì)與實(shí)現(xiàn)
基于 FOC 的無刷馬達(dá)驅(qū)動(dòng)板:電流調(diào)控、換向邏輯與驅(qū)動(dòng)性能-艾畢勝電子
直播云臺(tái)閉環(huán)步進(jìn)電機(jī)驅(qū)動(dòng)板關(guān)鍵技術(shù)研究
高精度步進(jìn)電機(jī)驅(qū)動(dòng)板設(shè)計(jì):從細(xì)分到閉環(huán)的全鏈路優(yōu)化
DRV8825步進(jìn)電機(jī)控制器IC:設(shè)計(jì)與應(yīng)用詳解
DRV8884步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
想要電機(jī)轉(zhuǎn)得穩(wěn)?TMC2226 256 微步細(xì)分,連細(xì)微動(dòng)作都絲滑~

泡沫起升儀步進(jìn)/伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù):實(shí)現(xiàn)沖程毫米級(jí)定位的電子方案

常用兩相步進(jìn)電機(jī)和驅(qū)動(dòng)器參數(shù)
EVL6470步進(jìn)電機(jī)驅(qū)動(dòng)評(píng)估板技術(shù)解析與應(yīng)用指南
微五科技CF5010RBT60開發(fā)板驅(qū)動(dòng)步進(jìn)電機(jī)
Analog Devices / Maxim Integrated MAX22204步進(jìn)電機(jī)驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)
步進(jìn)電機(jī)細(xì)分大小與抗干擾有關(guān)嗎

HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論