 電驅動系統標定全流程指南:從生產扭矩秩序、基礎參數,到 MTPA與弱磁、診斷架構與模型化標定閉環
電驅動系統標定全流程指南:從生產扭矩秩序、基礎參數,到 MTPA與弱磁、診斷架構與模型化標定閉環

以下內容發表在「SysPro系統工程智庫」知識星球
- 關于電驅動系統標定全流程深度拆解 | 性能->診斷-> 駕駛性v1.0
- 「SysPro 動力系統功能解讀」專欄內容,全文11800字
- 非授權不得轉載,或進行散播,或用于任何形式商業行為
- 本篇為節選,完整內容會在知識星球發布,詳細分布見目錄頁
導語:今天聊聊電驅動系統的標定,本篇,我們會把性能標定、診斷標定和駕駛性標定放到同一條系統鏈路里,建立對標定的二維坐標,按"對象—流程—邊界—量產閉環"四個層級,講清楚標定是如何幫助整車建立扭矩秩序的?
很多人第一次接觸電驅動系統標定時,會把它理解成"把電機調轉起來,再把幾張曲線修漂亮"。但事情遠沒有這么簡單:電驅動系統要不要給準扭矩?能不能在高速區繼續放出能力?故障來臨時會不會誤報或漏報?坡道和冰面上會不會抖?熱浸之后還能不能把駕駛感受守住?這些問題最后都會落到標定上。也就是說,標定并不是控制開發完成之后的附屬動作,而是把電機、電控、傳感器、BMS、熱管理、傳動系統和整車場景重新打通的一輪系統工程,是真正讓我們電驅動產品"變得優秀"的精髓所在!

圖片來源:SysPro
這個系列,我們暫定的計劃是:1)先看臺架標定到底在標什么、準備什么、按什么順序推;2)再看相序、偏移角、磁鏈、Lq/Ld、PI、MTPA、弱磁、最大電流和四象限邊界為什么必須一層層建立;3)然后再繼續往下看動態響應、旋變與高壓診斷、堵轉與降額、坡道和冰面駕駛性,4)最后看冬夏季道路驗證如何把前面所有結論重新壓測一遍。

圖片來源:SysPro
跟著我們過完這條主線,相信后續再去看任何一個具體參數,腦子里就不會只剩下"這個值調大還是調小",而會先想到它在整條控制鏈里的位置、它和誰耦合?它解決的到底是對象認識問題、性能釋放問題、還是安全收口問題?
最后,如果時間精力允許,這個系列我們會把兩個關鍵點并進來:
第一件是生產扭矩秩序:很多團隊把扭矩問題理解成"驅動器算得準不準",卻沒有繼續追問扭矩命令是怎樣被組織、過濾、限幅、仲裁、落地到驅動系統里的。
第二件是模型化標定與自動化工具鏈:當對象參數越來越多、邊界越來越復雜、項目節奏越來越快之后,只靠人工掃點和經驗回填,已經很難支撐量產平臺化。也就是說,今天討論電驅動系統標定,必須同時覆蓋"生產秩序"與"數據秩序"這兩條線。
|SysPro備注:標定,我們早已規劃的內容,本次是1.0首發,內容較長分上/中/下,如果大家有更多的實踐性問題可以在文末留言,會在2.0中進行解答。

圖片來源:SysPro
目錄
上篇
01 標定本質:建立整車扭矩秩序
1.1 性能、診斷、駕駛性三層邏輯
1.2 臺架/軟件/整車統一協同語言
02 臺架標定前:輸入條件與驗收口徑
2.1 先決條件對標定質量的影響
2.2 上線前檢查與指標定義
03 標定流程:步驟與先后依賴關系★
3.1 全流程節點與執行順序
3.2 數據核對、版本凍結與復測
中篇
04 基礎坐標系與對象參數標定★
4.1 相序、轉向、極對數與旋變偏移
4.2 電流環PI、磁鏈、Lq/Ld與傳感器
05 MTPA、弱磁與外特性邊界標定★
5.1 MTPA實測最優軌跡
5.2 弱磁、Id_Min與高速能力
06 精度、響應與動態補償標定★
6.1 動態性能指標平衡
6.2 阻力/轉矩補償與平順性
下篇
07 診斷閾值與保護邊界設定★
7.1 高壓雙路徑診斷與門限設定
7.2 旋變、電流故障與分級保護
08 駕駛性、降額與低速場景標定★
8.1 防抖、坡道、冰面與ESP協同
8.2 降額、防溜坡與自適應限值
09 冬夏季路試與量產數據閉環★
9.1 高溫、熱浸與持續爬坡驗證
9.2 低溫、電壓波動與SOC一致性
10 模型化標定與平臺化復用★
10.1 DoE、代理模型與自動查表
10.2 參數資產化與平臺繼承復用
注:以上完整內容知識星球發布(點擊文末"閱讀原文"了解,★)
上篇
01
標定本質:建立整車扭矩秩序
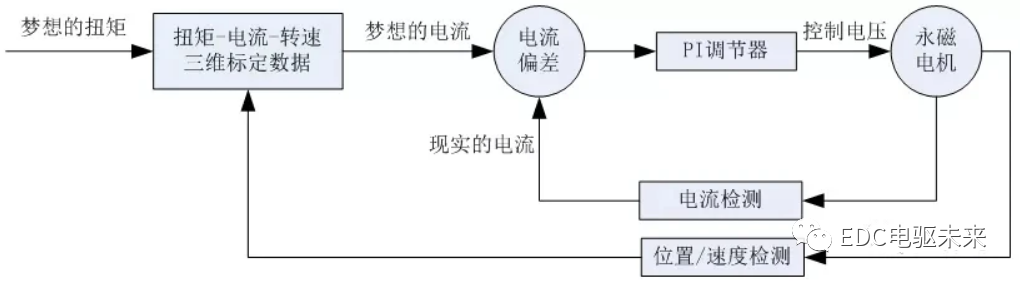
很多團隊在項目初期討論電驅動標定時,喜歡直接問"先調哪個參數"。這個問題很重要,但更關鍵的問題其實是:你到底在給什么對象做標定?如果對象只被理解成"一個逆變器帶一個電機",那后面很多問題都會被看窄。更準確的說法應該是,標定的對象是一整條扭矩鏈:控制器如何理解電機,電機如何把電流變成扭矩,扭矩如何經過傳動系統和輪胎變成車輛加減速,異常時又如何被診斷、限扭和恢復?
也正因為如此,標定真正建立的不是某一張表,而是一種整車扭矩秩序。所謂扭矩秩序,就是駕駛員發出意圖之后,系統在什么范圍內可以快速響應、在什么情況下要保守處理、在越界時如何退讓、在恢復時如何回到正常控制。
|SysPro備注:正式開始前,我們先把標定的對象邊界講清楚。這是個基本概念:標定它不是單純調電機,而是在建立一整條從控制器到駕駛員體感都成立的扭矩秩序。

圖片來源:SysPro
1.1 性能、診斷、駕駛性三層邏輯
下面我們先建立個全局架構,標定的三個層級:性能標定、診斷標定、駕駛性標定。

圖片來源:SysPro
性能標定,通常占電驅動臺架工作量的大頭,一般認為大約占整個過程的大部分。
這是因為它負責回答最底層的問題:控制器眼里的這個電機對象到底長什么樣?相序、正轉方向、偏移角、磁鏈、Lq/Ld、MTPA、弱磁、電流動態響應,這些都屬于性能層。只要這一層還不穩,后面很多現象都不具備可解釋性。

圖片來源:SysPro
診斷標定,則大約占到另外一大塊工作量。
它的價值在于,系統不只要會控,還要知道什么時候已經不該繼續按正常邏輯去控?電流失控、高壓電壓異常、旋變信號失真、軟件保護閾值越界、硬件鏈路不合理,這些都不是"有問題再看"的附屬項,而是量產控制秩序的一部分。門限過緊會造成誤觸發,門限過松又會侵蝕安全邊界,所以診斷層絕不是性能層做完后隨手配一下。

圖片來源:SysPro
駕駛性標定,雖然在臺架工時占比上往往更小,但它承擔的是最終體驗收口。
臺架上的對象邊界相對干凈,而整車里還會疊加電池狀態、傳動鏈剛度、輪胎附著、ESP 協同、坡度和環境溫度等因素。很多看起來像"電機響應慢"的問題,本質上可能是傳動系統振動;很多看起來像"控制器抖動"的問題,真正根因又可能是低溫電壓波動、低附著或底盤系統介入。

圖片來源:SysPro
因此,這里我們也可以把上述提到的三層理解成三種驗收標準:
性能層更偏可量化,臺架上直接看扭矩誤差、速度誤差、效率邊界和高速能力
診斷層更偏可信度,看誤檢率、漏檢率、觸發延遲、恢復邏輯
駕駛性層更偏主客觀結合,既要看波形,也要看駕駛員感受和典型場景一致性
把這三層分清以后,標定這件事就不再是調參數,而是在搭建一整套量產控制秩序。
|SysPro備注:上面講得這些不僅適用于標定工程人員,對于實際產品開發中的任意成員都適用,因為只有把這一基本概念統一,軟硬件、臺架、系統、整車幾波人才能統一理解、協同推進后續工作,下面我們具體聊聊。上面提到的三層,也會在后續主章節中詳細展開。

圖片來源:SysPro
1.2 臺架/軟件/整車統一協同語言
相信大家也有感受,很多項目推進不順,并不是某個人不會調,而是臺架團隊、軟件團隊、整車團隊說的根本不是同一種語言:
臺架團隊更關心電流、扭矩、速度和效率圖
軟件團隊更關心控制模式、濾波、狀態機、故障分級
整車團隊更關心起步、跟腳、頓挫、坡道、冰面和熱衰減
如果這三撥人之間沒有一套統一的對象定義,最后就很容易出現"大家都很忙,但問題越改越散"的情況。|SysPro備注:這也是System Engineering重要的原因所在

圖片來源:SysPro
所以標定一開始就應該約定幾個最基本的問題:車輛前進方向對應的電機正轉是什么?軟件相序和硬件相序的映射怎么定義?哪些指標算臺架驗收、哪些算整車驗收?診斷觸發以后是限扭、限功率還是直接退出?恢復條件又是什么?別小看這些定義類問題,它們看起來不像參數,但后面所有參數都依賴這些定義。

圖片來源:SysPro
如果把這個工作做扎實了,臺架數據才能被軟件正確解釋,軟件邏輯才能被整車正確驗證。否則就會出現一種非常典型的現象:臺架說指標已經達成,整車卻說車還不好開;軟件說診斷已經合理,整車卻說誤報碼太多;整車說坡道起步不穩,臺架卻找不到異常。真正成熟的標定,一開始就在建立共同語言,而不是到項目后期再去翻譯各方結論。

圖片來源:SysPro
|SysPro備注:上面想強調的是標定不是末端調參。末端調參的邏輯是問題出來了再修、而系統工程標定的邏輯,是先把語言、對象、邊界和流程定義清楚,再讓不同團隊在同一張地圖上推進。之所以先提這部分,是想先把對象、邊界和順序錨住,再去看具體參數,就更容易抓住主線。
以下內容知識星球中發布
02
臺架標定前:輸入條件與驗收口徑
(知識星球發布)
2.1 先決條件對標定質量的影響
2.2 上線前檢查與指標定義

圖片來源:SysPro
03
標定流程:步驟與先后依賴關系
(知識星球發布)
3.1 全流程節點與執行順序
3.2 數據核對、版本凍結與復測

圖片來源:SysPro
中篇
04
基礎坐標系與對象參數標定
(知識星球發布)
4.1 相序、轉向、極對數與旋變偏移

圖片來源:SysPro
4.2 電流環PI、磁鏈、Lq/Ld與傳感器

圖片來源:SysPro
05
MTPA、弱磁與外特性邊界標定
(知識星球發布)
5.1 MTPA實測最優軌跡

圖片來源:Mathworks
5.2 弱磁、Id_Min與高速能力

圖片來源:Mathworks
06
精度、響應與動態補償標定
(知識星球發布)
6.1 動態性能指標平衡
6.2 阻力/轉矩補償與平順性

圖片來源:SysPro
下篇
07
診斷閾值與保護邊界設定
(知識星球發布)
7.1 高壓雙路徑診斷與門限設定
7.2 旋變、電流故障與分級保護

圖片來源:SysPro
08
駕駛性、降額與低速場景標定
(知識星球發布)
8.1 防抖、坡道、冰面與ESP協同
8.2 降額、防溜坡與自適應限值

圖片來源:SysPro
09
冬夏季路試與量產數據閉環
(知識星球發布)
9.1 高溫、熱浸與持續爬坡驗證
9.2 低溫、電壓波動與SOC一致性

圖片來源:SysPro
10
模型化標定與平臺化復用
(知識星球發布)
10.1 DoE、代理模型與自動查表
10.2 參數資產化與平臺繼承復用

圖片來源:SysPro


圖片來源:SysPro
|SysPro備注:以上為節選,完整解讀內容星球內搜索關鍵字查閱
以上是電驅動系統標定全流程深度拆解:從生產扭矩秩序、基礎參數,到 MTPA/弱磁、診斷架構與模型化標定閉環v1.0的解析(節選),完整版解讀會在知識星球[SysPro|電驅動系統性能解讀]專欄更新發布,歡迎閱讀學習,希望有所幫助!
-
電機
+關注
關注
144文章
9664瀏覽量
154543 -
驅動系統
+關注
關注
3文章
413瀏覽量
28650 -
整車
+關注
關注
0文章
54瀏覽量
7041
發布評論請先 登錄
在IAR Embedded Workbench中使用volatile和const關鍵字實現標定參數
什么是電機標定?電機標定的工作原理
基于ASAP標準的發動機標定診斷系統設計
基于ASAP標準的發動機標定診斷系統設計
基于交叉熵算法的跟馳模型標定

新能源汽車ECU標定工具-ATI VISION標定系統
基于除法畸變模型的鏡頭線性標定方法
基于模型的標定軟件xCAL介紹


什么是電機電控標定?到底標的啥?
《聊一聊ZXDoc》之汽車標定、臺架標定、三高標定




 工商網監
工商網監
評論