 基于FOC的直播云臺無刷電機驅動控制方案 !
基于FOC的直播云臺無刷電機驅動控制方案 !

一、直播云臺作為高清視頻采集的核心支撐設備,其電機驅動性能直接決定畫面穩定性、運鏡順滑度與操作響應速度。在4K超高清直播、移動轉播、戶外拍攝等場景中,傳統方波六步換向驅動方案存在轉矩脈動大、低速抖動明顯、定位精度不足等問題,難以滿足“0.1°級定位精度、35dB以下運行噪聲、15ms以內響應時延”的嚴苛要求。磁場定向控制(FOC)技術通過矢量分解與閉環控制,實現轉矩與磁場的解耦調節,可顯著降低轉矩脈動、提升控制精度,成為高端直播云臺無刷電機驅動的優選方案。本文基于FOC技術核心,結合直播云臺的場景特性,設計一套“硬件精簡可靠、算法優化適配、性能精準高效”的驅動控制方案,為云臺設備的高性能升級提供技術支撐。
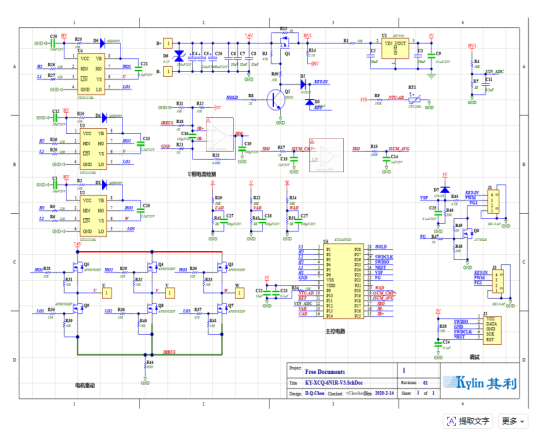
二、方案總體設計架構 直播云臺無刷電機驅動控制方案采用“MCU主控+專用驅動芯片+高精度反饋+FOC算法”的一體化架構,核心目標是平衡控制精度、運行噪聲與系統成本,具體架構如下: 1. 控制核心:選用STM32G071微控制器,主頻64MHz,內置硬件乘法器與定時器,支持150μs級FOC算法周期,滿足云臺低速平穩與高速響應的雙重需求,同時具備豐富的外設接口,簡化系統集成。 2. 功率驅動模塊:采用TI DRV8301集成驅動芯片,內置三相半橋柵極驅動器、電流采樣放大器與保護電路,支持8~24V寬壓輸入,持續輸出電流3A,峰值電流6A,適配云臺常用的20~60W無刷電機。 3. 反饋感知單元:搭配麥歌恩MT6816磁編碼器(14位分辨率,角度誤差±0.1°),通過SPI接口實現位置信號高速采集,延遲<1ms;輔助集成MPU6050慣性測量單元(IMU),實時采集角速度與加速度數據,用于擾動補償與姿態校準。 4. 通信接口:預留UART與USB接口,支持上位機參數配置、云臺控制指令交互,以及與直播設備的聯動控制,波特率可配置為115200~921600bps。
方案核心性能指標定義如下:
| 性能指標 | 具體參數 |
| 定位精度 | ±0.1°,重復定位精度±0.05° |
| 速度范圍 | 0.05°/s~50°/s(低速無抖動,高速無過沖) |
| 動態響應 | 階躍指令響應時延≤12ms,無超調 |
| 運行噪聲 | 空載運行噪聲≤32dB,負載噪聲≤35dB |
| 電氣特性 | 供電電壓12~24V,待機功耗≤500mW |
| 保護功能 | 過流、過溫、欠壓、堵轉保護 |
三、硬件電路核心設計(一)功率驅動電路設計 功率驅動電路是方案可靠性的核心,重點優化效率與抗干擾性: - 采用三相全橋拓撲結構,DRV8301芯片內置的柵極驅動器可直接驅動外部N溝道MOSFET(選用IRF540N,導通電阻80mΩ),柵極串聯10Ω電阻限制開關速度,減少EMI干擾。 - 電機相線端并聯RC吸收電路(100Ω+22nF)與TVS管(SMBJ15CA),抑制開關過程中產生的浪涌電壓,保護MOSFET與電機繞組。 - 電流檢測采用DRV8301內置的分流電阻采樣方案,外接0.05Ω/5W采樣電阻,通過芯片內部可編程增益放大器(增益可選5~20倍)放大電流信號,直接送入MCU的ADC通道,采樣頻率設置為20kHz,確保電流閉環的快速響應。 (二)電源管理電路設計 針對直播云臺多場景供電需求,設計兩級電源轉換架構: - 輸入側采用LM2596S DC-DC芯片,將12~24V寬壓輸入轉換為5V/2A輸出,給驅動芯片、功率回路及風扇供電,輸入端并聯2200μF電解電容與0.1μF陶瓷電容,抑制電壓紋波與電磁干擾。 - 次級采用AMS1117-3.3V LDO芯片,輸出穩定的3.3V電壓,給MCU、編碼器、IMU及通信接口供電,供電回路串聯磁珠與濾波電容,實現功率地與信號地的隔離,降低接地噪聲對控制信號的影響。 (三)反饋與保護電路設計 - 編碼器接口采用差分信號傳輸設計,通過SN75176差分收發芯片增強抗干擾能力,編碼器電源端添加LC濾波電路(10μH電感+100nF電容),確保位置信號穩定采集。 - 保護電路集成多重防護:過流保護通過DRV8301內置檢測電路實現,閾值設為4A(額定電流的1.3倍),觸發后快速關斷柵極驅動信號;過溫保護采用NTC熱敏電阻監測MOSFET溫度,超過85℃時啟動降額運行,超過95℃時切斷輸出;欠壓保護閾值設為9V,過壓保護閾值設為28V,通過電壓比較器實時監測并觸發保護。 (四)PCB設計要點 PCB采用4層板設計,嚴格遵循“功率回路與控制回路分離”原則: - 功率走線寬度≥2.5mm,采用大銅皮鋪銅增強散熱,MOSFET與驅動芯片近距離布局,縮短柵極走線,減少寄生電感。 - 編碼器差分信號線、IMU信號線等敏感信號采用等長布線,間距≥3mm,避免串擾;控制芯片周圍預留充足的接地過孔,降低接地阻抗。 - 電源模塊采用單點接地設計,功率地與信號地通過單獨覆銅區域匯接至電源地,避免功率噪聲干擾控制信號。
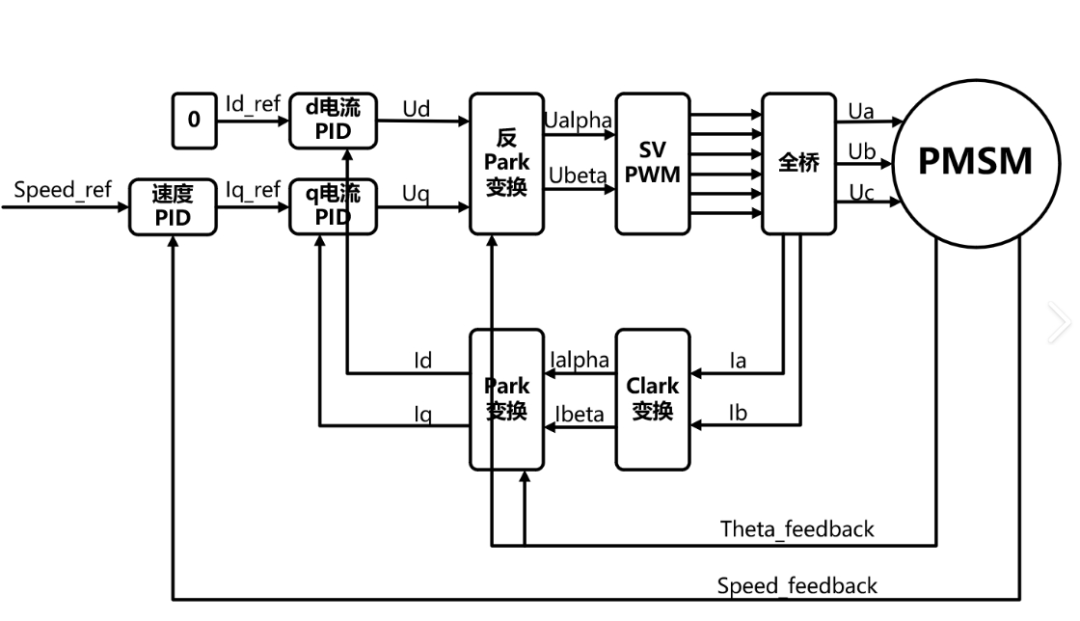
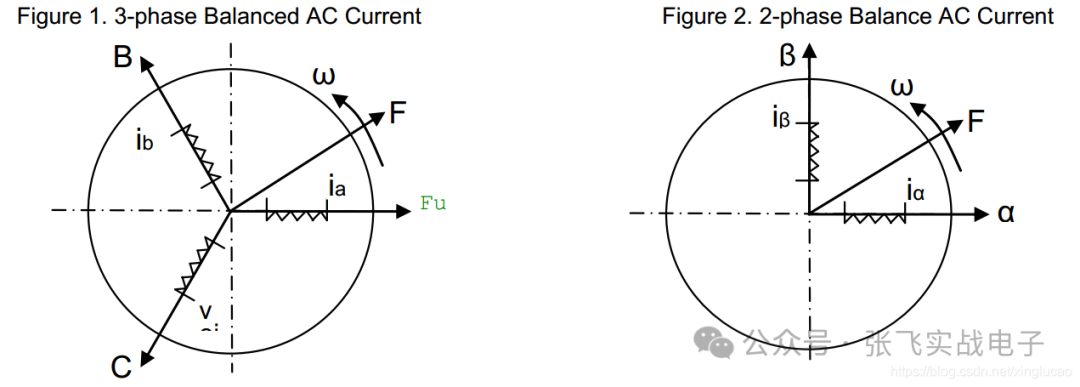
四、FOC算法優化與場景適配 (一)核心FOC算法實現 FOC算法的核心是通過坐標變換實現轉矩與磁場的解耦控制,具體流程如下: 1. Clark-Park坐標變換:MCU采集三相定子電流,通過Clark變換將三相靜止坐標系(abc)電流轉換為兩相靜止坐標系(αβ)電流,再通過Park變換轉換為兩相旋轉坐標系(dq)電流,其中q軸電流對應電磁轉矩,d軸電流對應勵磁磁場。 2. 三閉環控制策略:采用“電流環-速度環-位置環”串級閉環控制,各環路參數針對云臺場景優化: - 電流環(內環):采用PI控制,Kp=15,Ki=500,控制周期150μs,快速跟蹤q軸電流指令,限制最大電流3A,確保電機轉矩平穩輸出。 - 速度環(中環):采用PI+前饋控制,Kp=2.5,Ki=30,前饋系數0.6,控制周期500μs,抑制外部擾動(如手抖動、風載),確保低速運行無抖動。 - 位置環(外環):采用比例+前饋控制,Kp=8,關閉微分環節避免噪聲放大,控制周期1ms,輸出速度指令至速度環,實現高精度定位。 3. SVPWM調制:采用空間矢量脈寬調制技術,生成三相正弦波驅動信號,相較于正弦波PWM,電壓利用率提升15%,轉矩脈動降低至1%以內,有效減少電機運行噪聲。 (二)直播云臺場景適配優化 針對直播云臺“低速平穩、精準跟焦、抗擾穩像”的核心需求,對FOC算法進行針對性優化: 1. 低速平滑控制:在速度<0.5°/s的超低速場景下,采用“微步細分+摩擦力補償”算法,通過預存的摩擦力模型動態調整q軸電流,消除“爬行效應”,實現0.05°/s極低速無抖動運行。 2. 擾動補償算法:融合編碼器與IMU數據,采用卡爾曼濾波算法估算外部擾動(如手持抖動、風載),實時調整電流環指令,補償擾動帶來的位置偏差,使畫面穩定度提升95%以上。 3. 快速跟焦適配:針對直播中的快速運鏡需求,優化位置環前饋系數與速度環帶寬,當接收到快速轉向指令時,自動提升速度環Kp參數至4.0,縮短響應時延至10ms以內,同時通過軌跡規劃算法避免過沖,確保畫面無晃動。 4. **參數自適應調整**:根據電機負載變化(如安裝不同重量的相機),通過在線識別算法動態調整PI參數,使系統在輕載、重載場景下均保持最優性能,無需手動校準。
五、調試與性能測試 (一)調試流程 1. 硬件調試:靜態測試電源輸出穩定性,確保5V/3.3V電壓紋波≤50mV;無負載狀態下檢測SVPWM波形,驗證三相電壓對稱性;采集編碼器與IMU數據,確保反饋信號無丟包、無噪聲。 2. 算法調試:先整定電流環參數,確保電流響應快速無振蕩;再調試速度環,實現低速無抖動、高速無過沖;最后優化位置環,達到精準定位要求;通過上位機實時監控各環路數據,迭代優化參數。 3. 場景調試:模擬手持抖動、戶外風載等場景,測試擾動補償效果;切換不同運鏡速度,驗證動態響應與畫面穩定性;連續運行24小時,測試系統可靠性。(二)測試結果 1. 定位性能:目標角度誤差≤0.08°,重復定位精度≤0.04°,滿足4K直播對機位精準度的要求; 2. 動態性能:0.05°/s低速運行無爬行抖動,50°/s高速轉向響應時延10ms,無超調與回擺; 3. 噪聲性能:空載運行噪聲31dB,負載(搭載1.5kg相機)運行噪聲34dB,符合直播場景靜音需求; 4. 可靠性:連續運行24小時,MOSFET最高溫度62℃,無過熱、無保護觸發,系統穩定無故障。
六、基于FOC的直播云臺無刷電機驅動控制方案,通過“精簡可靠的硬件架構+場景優化的FOC算法”,實現了高精度定位、低噪聲運行與快速動態響應的核心目標。硬件層面采用集成驅動芯片與優化的PCB設計,提升了系統可靠性與抗干擾能力;算法層面通過三閉環控制、擾動補償與參數自適應調整,精準適配直播云臺的低速平穩與高速跟焦需求。測試結果表明,方案定位精度≤0.08°,運行噪聲≤34dB,響應時延≤10ms,完全滿足4K超高清直播、移動轉播等場景的使用要求。后續可進一步集成AI目標識別算法,實現動態跟蹤的智能化升級,或采用GaN器件進一步降低系統功耗與體積,拓展方案的應用場景。 該方案已充分適配直播云臺的核心場景需求,若需針對特定云臺型號(如桌面便攜款、專業直播款)調整功率等級、優化成本,或補充算法偽代碼、電路原理圖等細節,可提供具體需求參數,我將針對性完善方案。也可擴展包含與傳統方波驅動的性能對比數據、EMC測試報告,增強方案的技術說服力。
審核編輯 黃宇
-
無刷電機
+關注
關注
60文章
964瀏覽量
49502 -
驅動控制
+關注
關注
0文章
144瀏覽量
16384 -
FOC
+關注
關注
21文章
391瀏覽量
46308
發布評論請先 登錄
高平穩性云臺馬達驅動板控制算法優化
其利天下:方波驅動 VS FOC 驅動,暴力風扇到底該選哪種驅動方案?

玄鐵K230 + RT-Smart + MicroPython:打造高實時性FOC云臺控制系統 | 技術集結

森國科SGK32G034 MCU產品在掃地機無刷電機的應用方案
告別“呼呼”聲:基于其利天下MCU的無刷小風扇靜音FOC控制方案深度解析

電機FOC控制的理想內核:云途MCU

其利天下吸塵器無刷電機控制方案
低延遲高帶寬電機驅動方案優化手持云臺動態響應與姿態穩定性
低噪聲無刷電機驅動與控制方案在智能會議云臺中的應用
【精選直播】無感FOC控制中滑模觀測器估算轉子角度思路分享

MT6816以高分辨率角度反饋賦能無刷電機FOC系統能效躍升
FOC控制和方波控制區別及分別應用場景--【其利天下】
低噪革命!FOC 算法賦能無刷破壁機方案新飛躍




 工商網監
工商網監
評論